海洋资料浮标结构关键问题研究
2013-10-08陈志平宁春林
孙 辰,陈志平,宁春林,牟 帅
(1.杭州电子科技大学机械工程学院,浙江杭州310018;2.国家海洋局第一海洋研究所,山东 青岛266061)
0 引言
海洋占地球表面积的71%,蕴藏着无尽的资源,是极具战略意义的领域。而厄尔尼诺、大海啸等海洋气候往往会在灾害发生海域造成多种物理、化学参数变化,海洋环境监测成为重要的海洋研究内容。海洋资料浮标则是一种搭载了大量观测海洋环境参数变化传感器的监测设备,可以长期、定点、连续、实时、全天候自动观测海洋水文气象,是研究各类海洋物理、化学及生物的平台。为了提高海洋气候、环境参数的监测质量,必须深入研究和设计浮标的结构,加强其在恶劣海况下工作的性能。本文在综述国内外浮标设计、分析与应用研究现状的基础上,着重探讨深海资料浮标在结构设计、可靠性分析及软件仿真等内容,也可以为进一步研究提供参考。
1 浮标结构设计应用现状
1.1 国内外浮标结构设计应用状况
国外对于海洋浮标的研制可追溯到二十世纪四十年代末、五十年代初。到了六十年代,美国在海洋调查中开始使用海洋浮标,直至七十年代中期,浮标技术趋于成熟[1]。近几年来,又相继研发了多种不同用途的海洋资料浮标。2003-2008年美国缅因大学[2]、美国NOAA国家数据浮标中心[3]、德州农工大学[4]设计了多款针对不同海况和用途的浮标。我国从二十世纪六、七十年代开始,开展了一系列锚泊浮标的研制工作。近几年主要由中科院海洋研究所研制了SZF型波浪浮标[5],中科院南海所设计了一款海洋光学浮标[6],海洋一所海气室自主集成研发了5000 m深海资料浮标—“白龙”[7]。
综合分析近年来国内外浮标的结构性能,海洋资料浮标有以下发展趋势:(1)搭载更多新型传感器;(2)数据采集通用化、标准化、高精度化;(3)浮标实时性及应变性更好;(4)浮标供能途径更广;(5)体积、重量微型化。而要成功实现这些新功能,必须对浮标系统的结构在海洋环境下的受力情况做更深入的研究。
1.2 国内外浮标结构理论研究状况
对于浮标理论研究始于美国H.O.贝托编写的《BUOY ENGEERING》一书。1997-2000年雅典理工学院、美国Woods Hole实验室等地多位学者利用理论模拟和实验方法对浮标力学性能进行了深入的分析研究[8-9]。
近十年来,国外浮标相关领域研究发展十分迅猛。2002年Leonard J W等对一个浮筒及其系泊系统相互作用进行了三维耦合分析[10]。2003年Umar A.等对松散式多点定锚浮标锚系进行分析[11]。2006年Mikael Eriksson等对一个柱状锚泊浮标做全尺度实验,并做理论分析[12]。2007年Sreeram等在规则波下对受约束球形浮标的运动情况做了深入研究[13]。
与此同时,国内海洋工程领域相关专家也对于各类浮标问题展开了一系列理论及实验研究。2003年南京理工大学焦君圣等提出了减少浮标横摇和垂荡振幅的方法[14]。2006年昆明理工大学吴家喜等对浮标锚链的长度与受力之间关系进行了理论探索[15]。2009年天津大学骆寒冰等对某单锚链3 m浮标的升沉、横摇响应展开实验研究[16]。同年上海海洋大学工程学院宋秋红等应用Fluent软件,模拟船形浮标体在风浪中的受力情况[17]。2010年中国海样大学杨永春教授等对悬挂仪器系留系统的形状因子,及各部件的粘性阻力做了研究[18]。同年西北工业大学曲少春等提出了提高圆柱形浮标稳定性的方法[19]。2011年大连理工大学王兴刚等基于势流理论,应用边界元方法对浮标水动性能参数进行了理论计算[20]。哈尔滨工业大学韩端峰等在2012年做了深海浮标设计,并用Hydrostar对其进行RAO响应分析[21]。
综上所述,国内外学者对浮标系统的理论研究主要集中于以下方面,如表1所示。
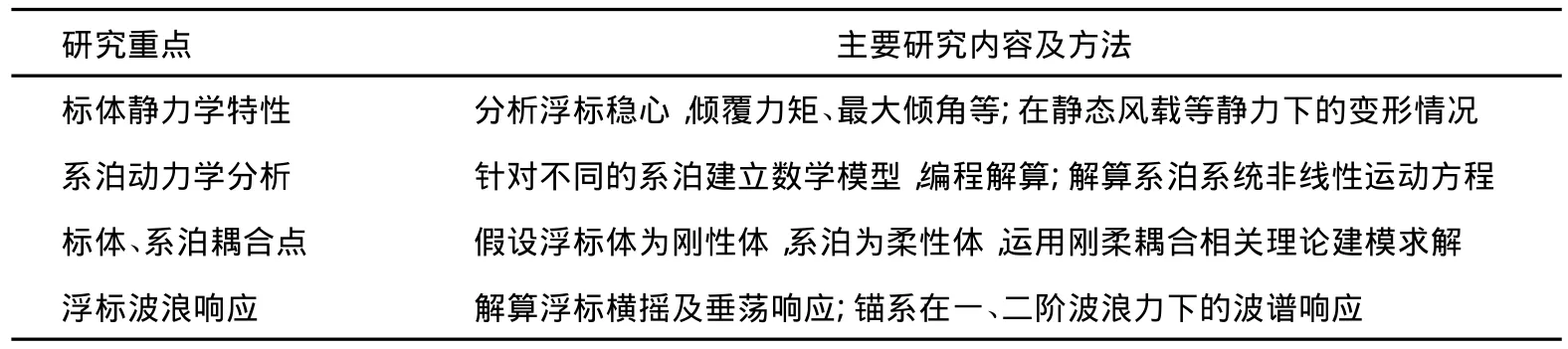
表1 浮标理论研究
国内外对浮标理论研究最初采用单纯的数学建模和方程求解的方法,而对于大部分工程人员来说难度较大,不易实现。随着计算机仿真技术的不断发展,造波池等实验设施的不断完善,对于浮标的研究,可更多的采用仿真软件结合模型试验的方法进行。
2 浮标结构仿真及实验方法
有限元建模仿真相较于传统建模仿真方法有以下几点好处:(1)建模更为直观;(2)计算过程简单;(3)结构分析与优化结合更为紧密。对于浮标的有限元分析及实验,总结主要内容及流程如图1所示。
2.1 浮标软件仿真方法
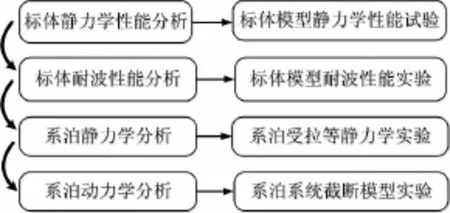
图1 有限元分析及实验主要流程
针对上文提及的浮标及其系泊动力学方面的关键问题,提出以下几种软件分析方法:(1)模态及频域分析法。将海浪作为一种规则波,采用随机谱载荷添加到浮标体上,分析浮标体的响应情况;(2)考虑流体与浮标体的边界面流固耦合。利用FLUENT等流体分析软件建立浮标流域的模型,算出流体部分结果并作为载荷添加到浮标体上,计算其产生的效果,具体操作流程如图2所示;(3)运用基于势流理论的水动力软件分析。相比较于一般的流体分析软件,这些软件不考虑流体粘性,计算量大大减小,计算效率大为提高。典型水动软件包括AQWA、Hydrostar等;(4)多体动力学软件分析对于浮标系统而言,需要重点关注验证刚性体与柔性体连接处的受力情况。可以使用以ADAMS、RecurDyn为代表的多体动力学软件,对其进行刚柔耦合分析。
以上4类有限元分析方法在浮标理论研究过程中各有优缺点,如表2所示。从中可见,对于标体设计之初,可作做模态及水动力分析,研究标体固有频率是否远离海浪共振频率,以及何种标型更适合所应用海况。做浮标细节设计时,针对浮标刚柔耦合点做多体动力学分析,了解其受力情况。这样综合运用有限元及多体动力学方法对结构分析,可兼顾到结构的整体性能和细节问题,又提高了计算效率,大大缩减了计算时间。
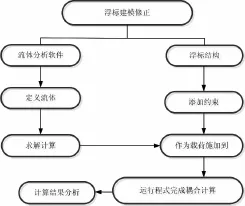
图2 流固耦合分析流程图
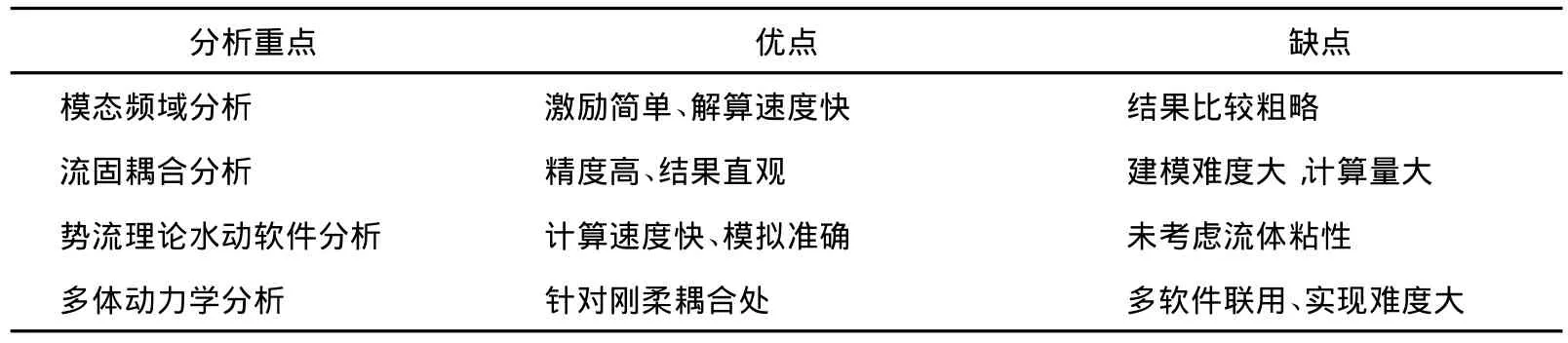
表2 浮标动力分析方法对比
2.2 浮标模型实验方法
与对其他海洋浮式结构的研究一样,对于浮标而言,单纯的软件模拟往往是不够的,更多时候,还需要结合试验分析。整理《海洋耐波性》、《船舶与海洋工程环境载荷》等书籍关于海洋浮式结构物实验方法,针对浮标提出以下几个实验方案:
(1)浮标缩比试验。在造波池内对缩小的浮标模型进行横摇、垂荡耐波性实验,拖曳实验等。特别是对于深海工作的小浮标进行缩比实验时,由于浮标尺寸与水深相差好几个量级,无法找到合适的缩比。此时就可以用软件仿真和截断实验相结合的方法去模拟浮标的真实深海运行状况。其基本思路如图3所示;(2)系泊疲劳破断实验。该实验主要是对绳做拉伸试验和疲劳试验以确定其受拉力情况;(3)实际工况下的测试。在实际工作浮标上加载各类传感器以检测其在实际工况下的受力以及振动倾斜情况。此外还可以在浮标上加载定位装置,确定其漂移情况。但是对于深海浮标系泊而言,现阶段尚未找到合适的拉力传感器可以长期、稳定地测定其应力、应变。

图3 截断模型实验仿真
3 结束语
本文总结了浮标结构设计发展历程,通过对近年来国内外浮标结构理论研究的分析,归纳出当前设计海洋资料所需考虑的结构关键问题。同时提出了综合运用多款有限元及多体动力学软件仿真研究的方法,并设计了几种可行的浮标模型试验的方法。总之,随着软件仿真技术发展和国内海洋船舶类实验室条件不断发展,我国科研人员对于海洋资料浮标结构力学性能的研究及实际应用也会取得更大突破。
[1]李桂香.国外海洋浮标技术发展前景[J].海洋技术,1986,1(1):68-72.
[2]Wallinga J P,Pettirew N R,Irish J D.The Gomoos Moored Buoy Design[C].San Diego:OCEANS 2003.Proceedings,2003:2 596-2 599.
[3]Teng C,Bernard L,Taft B,etal.A Compact Wave and Ocean Data Buoy System[C].Washington:Proceedings of MTS/IEEE OCEANS.2005:1 249 -1 254.
[4]John N W,Norman L,Guinasso Jr,etal,A New Buoy for Oceanographic and Spill Response Applications[C].Biloxi:MTS/IEEE.2009:1 -7.
[5]毛祖松.我国近海波浪浮标的历史、现状与发展[J].海洋技术,2007,2(2):23-26.
[6]杨跃忠,孙兆华,曹文熙,等.海洋光学浮标的设计及应用实验[J].光谱学与光谱分析,2009,2(2):565-569.
[7]Yu W,McPhaden M J,Ning C,etal.Bailong Buoy:A new Chinese contribution to RAMA[J].CLIVAR Exchanges,2012,(1):25 -28.
[8]Mavrakos S A,Chatjigeorgiou J.Dynamic behavior of deep water mooring lines with submerged buoys[J].Computers and Structures,1997,(64):819 -835.
[9]Paul W.Coastal Mooring Design:Taut Elastomeric and Chain Catenary Surface Buoy Moorings[C].Seattle:MTS/IEEE.1999:419-426.
[10]Leonard J W,Idris K,Yim S C S.Large angular motions of tethered surface buoys[J].Ocean Engineering,2000,27(12):1 345-1 371.
[11]Umar A,Datta T K.Nonlinear response of a moored buoy[J].Ocean Engineering,2003,(30):1 625 -1 646.
[12]Mikael Eriksson.Theory and Experiment on an Elastically Moored Cylindrical Buoy[J].IEEE Journal Of Oceanic Engineering,2006,(4):959.
[13]Radhakrishnan,Sreeram,Datla,etal.Theoretical and experimental analysis of tethered buoy instability in gravity waves[J].Ocean Engineering,2007,(34):261 -274.
[14]焦君圣,王昌明,胡作进.定位浮标在波浪中的动态响应[J].海洋技术,2003,22(4):14-17.
[15]吴嘉喜,李苹,王健培.水声测量浮标水面垂直振动分析[J].声学与电子工程,2009,(4):44-45.
[16]骆寒冰,李维林,杨永春,等.规则波中浮标运动及锚链受力的实验研究[C].北京:中国造船工程学会,2009:494-495.
[17]唐歆.海洋资料浮标水动力分析及结构研究[D].上海:上海海洋大学,2012.
[18]刘勇.海洋浮标水下悬挂系统设计[D].青岛:中国海洋大学,2010.
[19]曲少春,郑琨,王英民,等.圆柱形浮标运动分析与仿真[J].计算机仿真,2010,27(6):363-367.
[20]王兴刚,孙昭晨,梁书秀,等.规则波作用下四锚浮标系统动力分析[J].海洋工程,2011,29(3):43-49.
[21]王浩.深海浮标的总体设计与计算分析[D].青岛:哈尔滨工业大学,2012.
