基于H/A/α-Wishart分类的极化SAR图像船只检测
2013-10-08尚晓波
杨 慧,吴 祥,张 建,尚晓波
(杭州电子科技大学信息与控制研究所,浙江杭州310018)
0 引言
随着极化合成孔径雷达(Synthetic Aperture Radar,SAR)图像处理技术的发展,利用极化SAR图像进行舰船检测,已经成为海洋遥感领域的重要应用。目标分解是将目标的极化散射矩阵或相干矩阵分解为几个分量之和,每个分量对应于基本散射体的散射机理,从而可以在海洋中区分出船只。文献[1]总结了极化雷达处理中的目标分解理论,将其分为基于Muller矩阵和Stokes矢量的分解、相干分解、特征值分解3类。文献[2]利用极化熵算法进行舰船检测,验证了在入射角小于60°的情况下极化熵可以增强舰船和海洋的对比度。由于目标分解的每个参数具有不同的意义,本文提出了构造包含多个极化参数的特征向量来反映舰船和海洋的散射差异,并根据实际检测问题采用H/A/α-Wishart分类的方法对极化SAR图像舰船目标进行检测,该方法能够提高舰船检测的精度,并减少了噪声等引起的虚警。
1 H/A/α分解
H/A/α分解是一种对极化相干矩阵进行分解的方法,它是将极化相干矩阵分解为极化熵H、反熵A和平均散射角α。
首先,对极化散射矩阵进行Pauli基展开后得到散射矢量表示:

由式1可得到相应的相干矩阵:

然后,将相干矩阵进行特征值分解为:

式中,矩阵U是由3个特征向量U1、U2、U3组成的矩阵。由于矩阵T为半正定的Hermitian矩阵,因此 λ1、λ2、λ3均为非负实数。
极化熵定义为相干矩阵的各个特征值之和,即:

式中,Pi是散射过程i的相对散射强度。极化熵描述了散射过程的随机性,它是反映特征值λ1和λ2、λ3之间的关系,是一个指示器,但不能反映出 λ2和 λ3之间的关系[3]。
目标的反熵定义为:

目标的平均散射角α定义为:

2 基于H/A/α-Wishart分类的船只检测
2.1 H/A/α分类
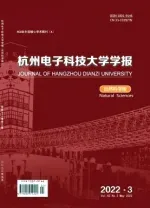
由于极化熵和α角能够很好地描述目标的极化散射特性,可将目标的极化散射特性用由目标熵和α角组成的分类平面(H-α分类平面)上的某一点位置来描述[4]。H-α分类平面被分成了9个基本的区域,代表9类不同的散射机理。现加入参数反熵A,使得H-α分类平面变成一个分类空间,如图1所示。由于反熵A的范围是0 1以将其一分为二,即0 0.5和0.5 1。这样,原来在H/α分类平面上的9类变成了H/A/α分类空间上的18类,这就使得图像的分类效果更加精细,且保留了船只的边缘细节部分。
图1 H/A/α分类空间
2.2 H/A/α-Wishart分类
H/A/α-Wishart分类是一种非监督的分类,主要是利用遥感图像数据的不同特性,从而分离出属于同一类型的象素点[5]。先收集采样象素点以计算出每个类别的矩阵估计,然后用每个象素点以计算出每个类别的均值之间的最小距离作为分类准则。
在要进行的极化SAR图像监督分类中,每个类别由其自身的相干矩阵Tm来表征,Tm是由第m类的训练样本估计得到。具体的步骤为:
(1)提供一个初始点Tm0,作为每一类的初值i=0;
(2)用距离测量法对整幅极化SAR图像进行分类;
(3)用步骤2中得到的分类后的象素点为每一类计算Tmi+1;
(4)回到步骤2,继续迭代,直到达到规定的中值条件。
H/A/α-Wishart分类首先是进行H/A/α分解,将分解所得的H、A、α作为特征向量进行初步的分类,然后利用分类的结果进行Wishart分类。具体的流程如图2所示。

图2 H/A/α-Wishart分类方法的流程图
3 实验结果与分析
本文选取的数据是Radarsat-2卫星于2008-04-09拍摄的全极化SAR的C波段SLC格式的旧金山地区的影像,分辨率为10 m,影像大小2 000×2 000象素。在这里截取了有关船只部分的影像,分别如图3、4所示。
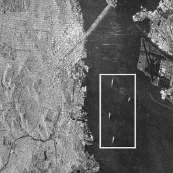
图3 旧金山地区的伪彩色图

图4 实验截取的图
对极化SAR数据首先做H/A/α分解,然后以分类后各类别作为训练样本集进行迭代,得到的非监督Wishart分类结果,如图5所示。为了更好的证明该分类的性能,用基于Cloude分解的非监督分类的方法与本文的方法进行对比,如图6所示。
图5 H/A/α-Wishart分类的结果

图6 Cloude-Wishart分类
图5中(a)、(b)、(c)是 H/A/α 分解得到的 H、A、α 结果图,图 5(d)是 H/A/α-Wishart分类的结果。由图5、6对比可知,基于Cloude分解的非监督分类虽然把船只都检测出来了,但是也产生了一个虚警目标,但H/A/α-Wishart分类不但能很好的检测出船只,并能保留船只的边缘信息,更有利于进行下一步的识别。
4 结束语
本文提出了一种基于H/A/α分解的Wishart非监督分类的极化SAR船只检测的方法。通过实验结果表明,该方法引入H/A/α分解进行船只检测,在保证检测率的情况下,有效地减少了噪声等因素产生的虚警,并保持了船只的纹理和边缘信息,为进行下一步的船只识别做了很好的基础。
[1]Cloude S R,Pottier E.A Review of Target Decomposition Theorems in Radar Polarimetry[J].IEEE Transaction on Geoscience and Remote Sensing,1996,34(2):498 -518.
[2]Touzi R,Charbonneau F.Characterization of Target Symmetric Scattering Using Polarimetric SARs[J].IEEE Transaction on Geoscience and Remote Sensing,2002,(40):2 507 -2 516.
[3]汪洋.极化合成孔径雷达图像处理及其应用研究[D].合肥:安徽大学,2007:95-96.
[4]王海江.极化SAR图像分类方法研究[D].成都:电子科技大学,2008:34-41.
[5]李海燕.极化SAR图像海面船只检测方法研究[D].北京:中国科学院海洋研究所,2007:31-35.