精密插片机械手关键技术
2013-09-29陈学军祝新宇陈金萍
陈学军 陈 卓 祝新宇 陈金萍
(西北机电工程研究所,陕西咸阳712099)
在汽车工业领域,精密插片机作为非标特种设备,在大批量生产并降低生产成本方面具有明显的技术和经济优势,属于先进制造技术。精密插片机对我们来说是一个全新的产品,供货时间短、研制风险大、研制费用高,没有现成产品和设计经验可以借用。精密插片机的核心部件精密插片机械手在开发和设计中有着非常大的难度。它要能够模仿人手的动作,按给定的程序、轨迹和要求实现自动抓取、移载、插装插片的功能。精密插片机械手可以提高插片的自动化水平和劳动生产率;也可以减轻劳动强度、保证产品质量、实现安全生产。
1 精密插片机械手简介
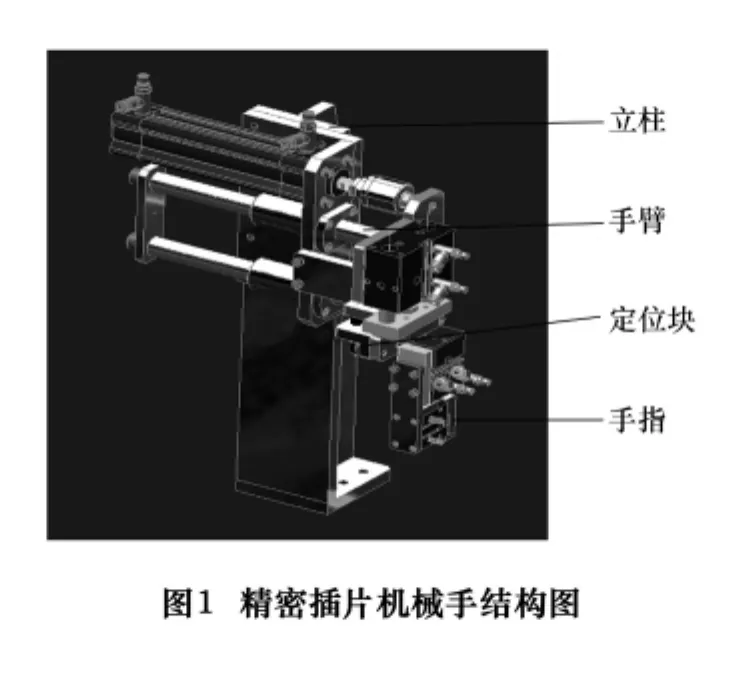
精密插片机械手结构如图1所示,该精密插片机械手主要用于汽车零件的插装。此机械手主要由立柱、手臂、定位块、手指等构成,属于自动化机械手。
2 精密插片机械手技术参数
3 精密插片机械手关键技术
3.1 手指
(1)手指具有足够的夹紧力:在确定手指的夹紧力时,除考虑工件重量外,还要考虑在移载和插装过程中所产生的惯性力和插装力,以保证插片插入的深度,不致插片线轴在运动过程中使插片产生松动或脱落。
(2)手指间应具有一定的开闭距离:两手指张开与闭合的两个极限位置称为手指的开闭距离。手指的开闭距离应保证插片能顺利进入或脱开。
(3)手指具备准确定位功能:为使手指和被夹持插片保持准确的相对位置,必须根据插片的形状,设计相应的手指形状,实现准确定位夹紧。
(4)手指具有足够的强度和刚度:手指除受到被夹持插片的反作用力外,还受到移载机械手臂在运动过程中所产生的惯性力和振动的影响,必须具有足够的强度和刚度以防折断或弯曲变形。
(5)手指结构应尽量简单紧凑,自重轻。
3.2 手臂
(1)手臂具有足够的强度和刚度:手臂在移载的过程中,不仅要克服自身和手指的重力,还要克服其在运动过程中产生的惯性力和振动的影响,必须具有足够的强度和刚度以防止折断或弯曲变形。
(2)手臂具有足够的定位精度:手臂在移载的过程中,必须定位准确可靠,重复精度要高。机械挡块定位是常用的一种定位方式,是在行程的起点和终点设置机械挡块。当插片机械手在起点和终点位置时,紧靠挡块而定位。
(3)手臂采用良好的缓冲定位方式:手臂移载接近起点和终点位置时,必须利用缓冲器的缓冲作用,使手臂定位前已经减速,在这种情况下,定位能达到较高的重复精度,一般可高于±0.1 mm。
(4)手臂移动用气缸可选用SMC或FESTO产品。
3.3 定位速度
定位速度对定位精度影响很大。这是因为定位速度不同时,必须耗散的运动部件的能量不同。通常,为减小定位误差应合理控制定位速度,如提高缓冲装置的缓冲性能和缓冲效率,并且控制驱动系统使运动部件适时减速。
3.4 立柱
立柱作为精密插片机械手的支撑部分,必须具有足够的刚度和强度。立柱不仅要克服自身重力,还要克服手臂、手指和定位块等在运动过程中产生的惯性力和振动,必须具有足够的强度和刚度以防止折断或弯曲变形。
3.5 驱动源
气压的压力波动及电压、气温的波动都会影响插片机械手的重复定位精度。因此,可以采用必要的稳压及调节气温措施。
3.6 控制系统
开关、电磁阀等电气元件的位置精度和灵敏度是不相同的。由于各种控制元件的精度和灵敏度不同,控制的精确度会有相应的变化;并且也与控制系统的控制方式有关,带有反馈系统的闭环控制方式比不带反馈系统的开环控制方式精确度要高。精密插片机械手控制方式采用可编程序控制器控制,具有手动控制和自动控制两种方式。可编程序控制器控制有较高的灵活性,当精密插片机械手工艺流程改变时,只要对PLC控制程序做相应的更改即可。
4 结语
本精密插片机械手结构紧凑、工作可靠,设计周期短;能够具体问题具体分析,采用模块化、标准化的通用元配件,使成本大为降低,具有显著的技术经济性;实现了插片过程的自动化、无人化;而且,只要把手指的结构稍作改变,就可实现多种插片的自动上料。此精密插片机械手在生产中提高了产品的生产质量,减轻了工人的劳动强度,提高了生产效率,促进了生产技术。此精密插片机械手在插片机领域的插装技术有所突破,同时为类似插片机的发展与进步起到推动作用。
[1]成大先.机械设计手册(第二、三卷)[M].4版.北京:化学工业出版社,2002.
[2]自动化技术-气动元件[Z].FESTO 2010版.
