基于单片机的步进电机细分控制器设计
2013-09-28黄乘顺
李 男 黄乘顺
(邵阳学院 信息工程系,湖南 邵阳 422004)
1 引言
目前在数控生产和经济型定位系统改造及机器人定位系统的应用领域,有三分之二以上采用的是步进电机作为伺服控制系统。随着工业技术的不断进步,微电子和计算机技术的发展,步进电机的需求量与日俱增,在国民经济各个领域都有重要的应用。在自动化控制、精密器械加工、航空航天技术以及所有要求高精度定位、自动记录、自动瞄准等高科技领域内,对步进电机的细分要求也越来越高,研制出一种高精度自动定位系统无疑具有十分重要的意义[1]。因此,如何改善电机的控制方法以提高定位系统的定位精度,成为提高系统性能的关键所在,这正是论文研究的主要内容。
步进电机是一种将电脉冲信号转换为角位移或直线运动的执行机构,由步进电机及其功率驱动装置构成一个开环的定位运动系统[2]。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步距角)。脉冲输入越多,电机转子转过的角度就越多;输入脉冲的频率越高,电机的转速就越快。因此可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度,从而达到调速的目的。
2 步进电机细分控制器总体方案
系统总体方案见图1所示。
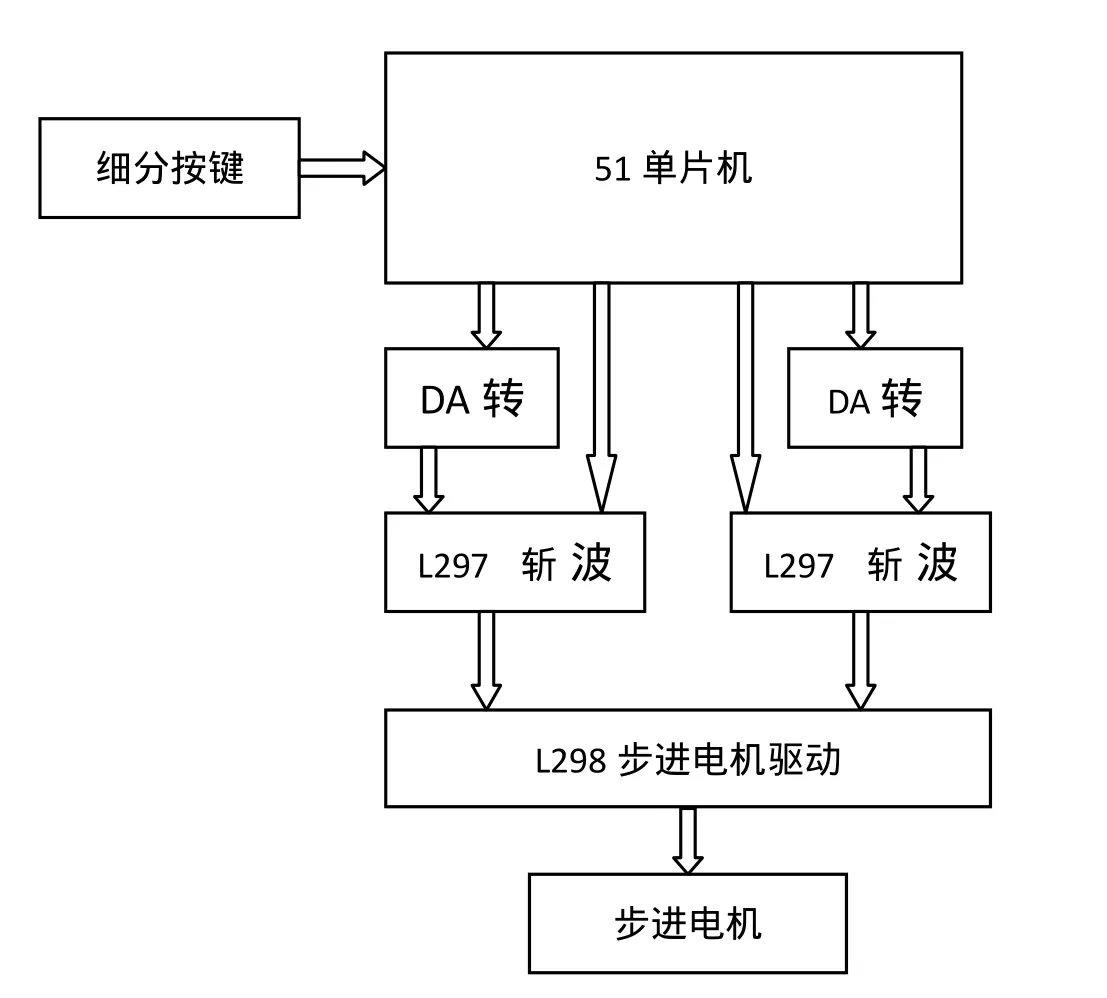
图2.1 系统方框图
该方案的总体思路是:以51单片机为核心通过外部按键选择细分码,该选择共有四种方法,分别是2细分、4细分、8细分、16细分四种选择。设计中,通过内部定时器决定电机转动快慢,当定时器/计数器0溢出后P1.1使CLOCK接口电平发生变化,定时计数器 1溢出后,通过查表法给P0口赋值,接P0口DA芯片得到单片机控制将数字信号转化模拟信号,经过DA转换后的模拟数值经过放大器,成为L297斩波器的Vref电压比较值。当计数器0产生溢出后,控制L297的时钟信号反转,计数器重装初值。L297经过斩波电路获得驱动步进电机的电流,L297内部三段译码转化成八步格雷码驱动L298,通过给L298驱动电机的电平,驱动步进电机转动,由此可以实现步进电机细分[3]。
3 步进电机控制系统设计
3.1 L297步进电机控制器
L297是步进电机专用控制器,它能产生4相控制信号,可用于计算机控制两相双极和四相单级步进电机,能够用于单四拍、双四拍、四相八拍方式控制步进电机。芯片内的PWM斩波器电路可在开关模式下调节步进电机绕组中的电流。该集成电路采用了SGS公司的模拟/数字兼容的I2L技术,使用5V的电源电压,全部信号的连接都与TTL/CMOS或者集电极开路的晶体管兼容。图中的变换器是一个重要的组成部分。变换器有一个三位计数器加某些组合逻辑电路组成,产生一个基本八步格雷码。
八步格雷码产生A-AB-B-BC-C-CD-D-DA-A,由变换器产生四个输出信号送给后面输出逻辑部分,输出逻辑提供禁止和斩波器所需要的相序。为了能获得良好的速度和转矩特性,相序信号是通过两个PWM斩波器控制电动机,每个斩波器用于双极性步进电机,其中一相用于单极性步进电机每对绕组。每个斩波器包含一个比较器、一个触发器和一个外部检测电阻[4]。内部结构方框图如图2所示:

图2 L297内部结构方框图
3.2 L298步进电机驱动芯片及电路设计
L298是一种高电压、大电流电机驱动芯片。该芯片的主要特点是工作电压高,最高工作电压可达46V。输出电流大,瞬间峰值电流可达3A,持续工作电流为2A。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器、线圈等感性负载。采用标准TTL逻辑电平信号控制,具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作。有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作。可以外接检测电阻,将变化量反馈给控制电路[5]。L298的内部结构图如图3所示。

图3 L298内部结构图
3.3 D/A转换
DAC0832是8分辨率的D/A转换集成芯片,与微处理器完全兼容。这个 D/A芯片以其价格低廉、接口简单、转换控制容易等优点,在单片机应用系统中得到广泛的应用。D/A转换器由8位输入锁存器、8位DAC寄存器、8位 D/A转换电路及转换控制电路构成,具体介绍见文献[6]。
DAC0832是双列直插式8位D/A转换器。能完成数字量输入到模拟量(电流)输出的转换。DAC0832中有两级锁存器,第一级锁存器称为输入寄存器,它的允许锁存信号为ILE,第二级锁存器称为DAC寄存器,它的锁存信号也称为通道控制信号。当ILE为高电平,片选信号 /CS 和写信号 /WR1为低电平时,输入寄存器控制信号为1,这种情况下,输入寄存器的输出随输入而变化[6]。此后,当 /WR1由低电平变高时,控制信号成为低电平,此时,数据被锁存到输入寄存器中,这样输入寄存器的输出端不再随外部数据DB的变化而变化。对第二级锁存来说,传送控制信号/XFER 和写信号 /WR2同时为低电平时,二级锁存控制信号为高电平,8位DAC寄存器的输出随输入而变化,此后,当 /WR2由低电平变高时,控制信号变为低电平,于是将输入寄存器的信息锁存到DAC寄存器中。
3.4 电源电路设计
该设计中,220V交流电压经过双组线圈变压器得到两路低压交流电,再分别由整流桥整流得到直流,电容滤波后分别经过三端稳压块7815和7805得到15V、5V直流,直流输出后加一个电容滤波得到平滑的直流电压。
4 实验结果分析
对设计进行实验测试发现,实验的误差来源主要有两个,一个是步进电机本身误差,由于合成磁场的幅值决定了步进电机旋转力矩的大小,由于实际的步进电机发热问题也使步进电机产生误差,各种原因使得在实验中步进电机长期停留在25.5〞不能再进一步细分。另外一个主要误差来源于本次电路设计和程序设计,在程序设计方面由于定时前要加一些判断,使得CLOCK脉冲周期不可能完全相同,产生细分电流脉宽不可能完全相同,可能相差几us左右。电路设计原因主要是从 DAC0832出来的电流不为 0,所以从DAC0832出来后的电流不可能为 0,经过运放后产生的电压和理想的电压有点差别。通过实际制作后对产品进行测试,测试结果及误差见表1所示(表中电压单位为mV)。
从误差表来看,这些误差相当小,一些精度比较低的步进电机误差可以忽略不计。 但就是因为由于这些微小的误差,使得步进电机存在步矩角有微小的差异。

表1 实验测试及误差(电压单位mV)
5 结论
该设计方案解决了步进电机低频振荡、高频失步和歩矩角大等问题,实现了步进电机的高精度控制。步进电机的细分驱动技术广泛应用于工业控制领域,具有高精度、低振动,低噪音的特点,且具有动态特性好等优势。但是,也存在一些问题,比如步进电机长期停留在25.5〞,不能再进一步细分,后续研究可以在这个方向做进一步的改进。
[1]McInroy,J.E.andLotthus,S.A..Step motor systems and control, 1995, 3(9):1225-1235.
[2]Ku Shaoping,Liu Jing.Design of the control systems of stepping motor based on STM32F10x and MDK, 2009,3(29):1671-4431.
[3] 方立, 李宏胜, 张建华.步进电机高精度细分控制系统[J].微电机, 2011,44(8):105-107.
[4] 严增辉.步进电机细分驱动系统设计初探[M].天津:天津工业大学出版社, 2011.
[5] 袁帅, 甘靖.基于FPGA的步进电机细分驱动技术研究[J].湖南理工学院学报, 2010, 23(1):2-10.
[6] 孙小美, 高晓蓉, 王黎, 等.基于 DSP的步进电机细分驱动技术[J].机车电传动, 2010,(4):21-22.