船模自航试验数值模拟研究
2013-09-27程宣恺周志勇魏菲菲陆琛亮
程宣恺,周志勇,陈 康,魏菲菲,陆琛亮
(上海船舶研究设计院,上海 201203)
0 引 言
船舶自航试验包括螺旋桨敞水试验、船模阻力试验和自航试验。螺旋桨敞水试验是鉴定和分析螺旋桨性能较为简便的方法,由螺旋桨敞水试验得到的是螺旋桨的推力系数TK、扭矩系数QK和敞水效率0η,相对于进速系数的变化规律,即螺旋桨敞水性征曲线;船模阻力试验可以得到船模阻力与速度之间的关系曲线,可以反映出阻力性能的优劣;船模自航试验是分析研究各种推进效率成分的重要手段,能够预报自航因子,预估实船的快速性能和判断螺旋桨、主机和船体之间的配合是否良好[1]。本文基于商业软件SHIPFLOW进行螺旋桨敞水试验、船模阻力试验和自航试验的数值模拟,而后通过水池试验验证,可以看出数值水池模拟对船模水池结果有一定的预估作用,能为线型设计和螺旋桨设计提供一定的参考。
1 数学模型
1.1 控制方程与湍流模式
不可压缩黏性流体的连续性方程和RANS方程可写成如下形式:

应该强调指出的是方程(1)、(2)不是封闭的,因此需要寻求补充关系-湍流模型,使方程封闭,采用SSTkω-湍流模式进行数值计算。SSTkω-湍流模型在处理近壁处流动时采用标准kω-湍流模型;在处理边界层边缘和自由剪切层时,采用kω-湍流模型,更适合于对流减压区的计算,并且方程还考虑了流动的正交发散项,从而使方程在近壁面处和远壁面处都适合见式(3)和(4)。
上述4式中各参数的选取,可查阅参考文献[2]。
1.2 模型的建立
采用库存桨进行数值模拟,在中国船舶科学研究中心水池做了螺旋桨敞水试验。在 SHIPFLOW 软件中模拟螺旋桨敞水时,需要设置不同半径处的螺距比、最大厚度、弦长、拱度,自动建模计算。在自航数值模拟过程中,通过引进分布在螺旋桨盘面上的质量力来模拟螺旋桨,将质量力分布在桨毂和螺旋桨最大直径之间。舵是按照实际尺寸,在SHIPFLOW软件中进行建模计算。螺旋桨的几何参数见表1。

表1 螺旋桨的几何参数
船体线型是由上海船舶设计院优化设计的,在中国船舶科学研究中心的拖曳水池做了阻力和自航试验。其主要参数见表2。

表 2 船型的主尺度和几何参数
1.3 计算区域与边界条件
对于螺旋桨敞水试验模拟,选取的计算域为长方体,其尺寸为18D×20D×20D(轴向×径向×周向),其中D为螺旋桨直径,如图1所示。船模阻力和自航试验模拟,采用自由模,计算区域为半个圆柱,即纵向从船艏向前延伸0.5个船长,从船艉向后延伸1个船长;横向从中纵剖面向两侧各延伸2.5个船长;垂向从静水面向下延伸2.5个船长,进行整船计算见图2。

图1 螺旋桨敞水区域划分

图2 船体区域划分
控制方程使用有限体积法离散,其中对流项采用二阶迎风差分格式。入口边界采用速度入口;出口边界采用自由出流;螺旋桨和船体表面为滑移壁面。
1.4 网格数及划分形式
数值模拟中采用全结构化网格,网格的拓扑关系为:横向为O型网格,纵向为H型网格。螺旋桨敞水数值模拟的网格数约40万,见图3;船模阻力和自航试验的数值模拟总网格数约400万,见图4。

图3 螺旋桨敞水模拟网格
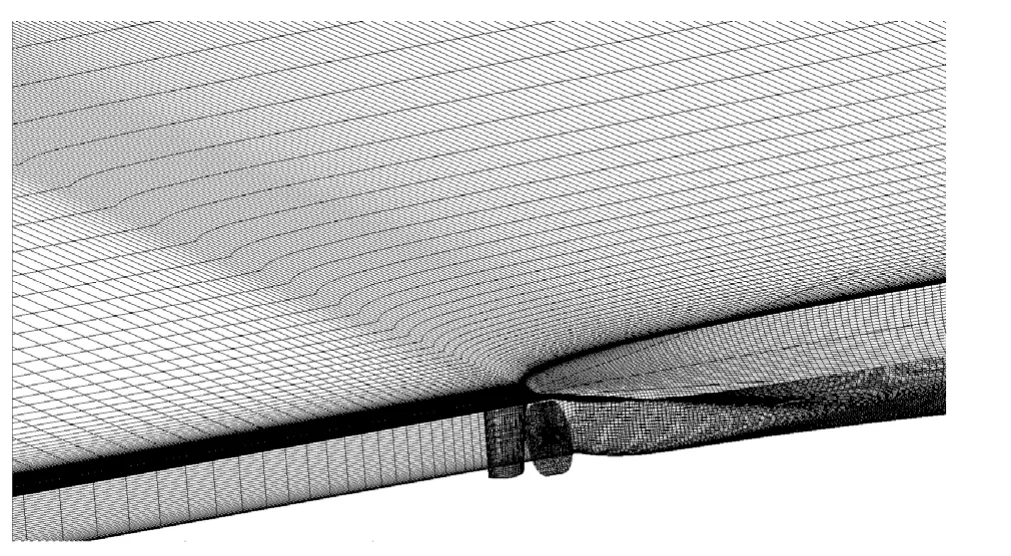
图4 船体、舵和桨区域的网格形式
2 数值计算结果分析
2.1 螺旋桨敞水数值模拟结果分析
在水池中进行螺旋桨敞水试验时桨模转速固定,改变拖车速度可实现进速的变化。螺旋桨桨模的直径D为0.24516m,其转速n为14.0r/s, 进速系数J的范围为0~1.0。模拟时只选取比较常用的一段进速系数进行数值模拟,选取的模拟点为0.3~0.8进速系数范围内的10个模拟点。在0.75倍的半径处雷诺数都大于 4 × 105,满足大于临界雷诺数的要求。
由图5可知,螺旋桨敞水性能曲线的数值计算与试验结果吻合较好。在设计点 J = 0 .7处,推力系数 KT、扭矩系数KQ、敞水效率η0的计算结果与试验结果的偏差分别为4.0%、8.0%、4.0%。与试验结果曲线相比,数值模拟所得 J ~ KT曲线的线斜率绝对值稍偏小,两者大约在 J = 0 .57处相交,进速系数J较大(J ≥0.75)和较小(J ≤ 0 .4)的区域偏差稍大,中间部分偏差都在 4%以内。数值模拟的 J ~ KQ曲线相比试验结果,线斜率的绝对值同样稍偏小,两者大约在 J = 0 .50处相交,与 J ~ KT曲线相似,在进速J较大和较小的区域偏差稍大,中间部分偏差较小。而 J ~η0曲线在整个模拟范围内,数值模拟结果和试验结果偏差都较小,在4.0%以内。

图5 螺旋桨敞水性征曲线
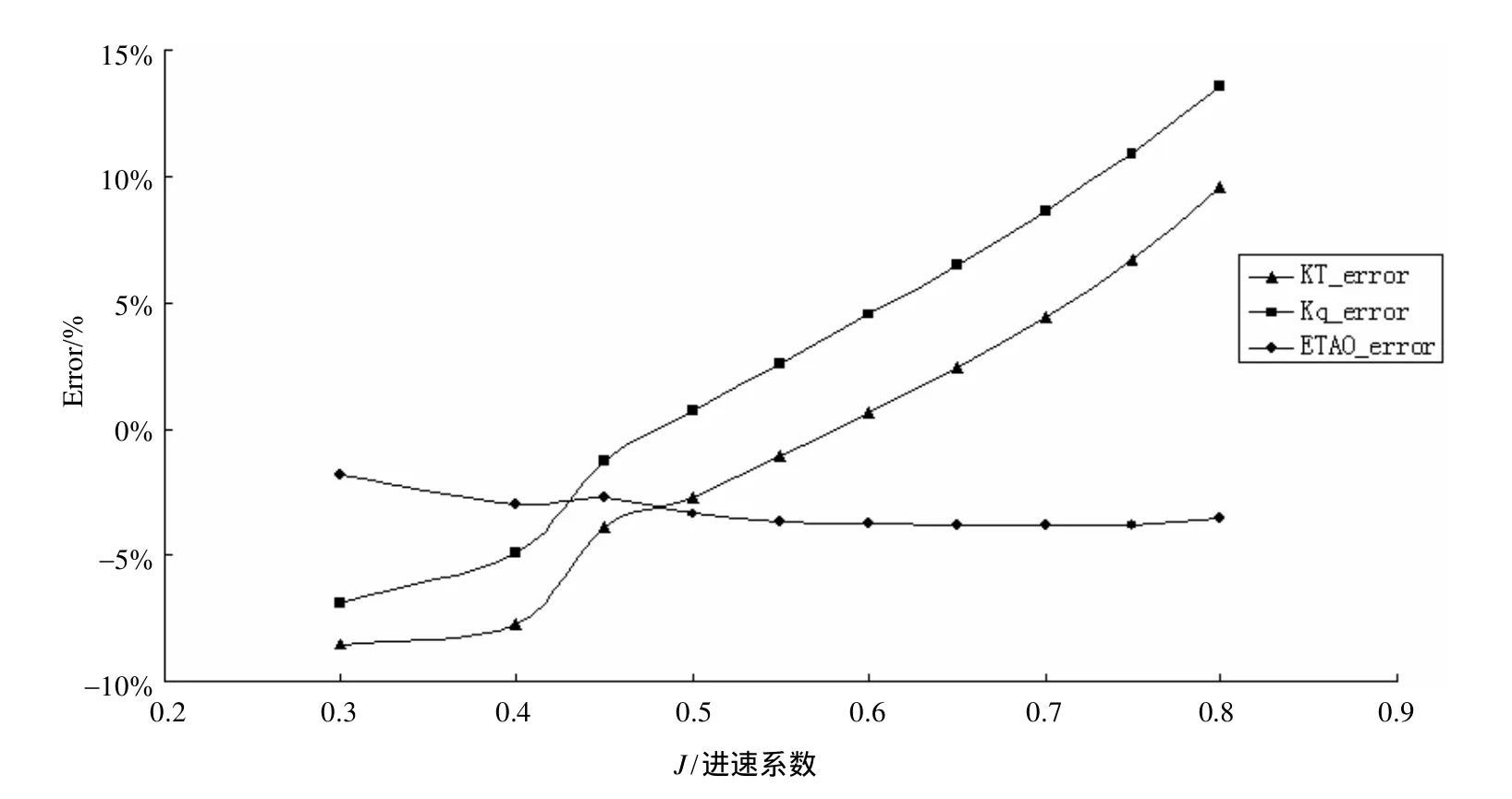
图6 误差结果
总的来说,对数值模拟的整个进速系数范围内,性征曲线的计算结果与试验结果在0.4~0.7的范围内吻合得较理想。推力系数TK 、扭矩系数QK 的数值模拟结果和试验结果基本一致,只是在斜率上稍有偏差,而敞水效率0η在各进速下偏差都较小,设计点在0.7J=附近,所以数值模拟结果基本满足应用要求。
SHIPFLOW软件模拟螺旋桨敞水是基于升力线理论加摩擦阻力修正的方法[3],可能理论内在的缺陷是导致模拟结果和试验结果偏差的原因之一。
2.2 船模阻力数值模拟结果分析
对船模在不同速度下的流场进行数值模拟,区域的划分和边界条件的设定见 1.3节,湍流模型采用SSTkω-模型,计算5个速度点,傅汝德数Fr分别是0.196、0.209、0.221、0.233和0.239,换算到实船的航速分别是16kn、17kn、18kn、19kn和19.5kn,设计航速19kn,表3给出了船模阻力试验结果和数值计算结果。

表3 不同航速下船模的总阻力系数模拟结果和试验结果比较
从表3可以看出,数值模拟结果与试验值比较,前两个航速偏差稍大,在5%左右,后3个航速偏差较小,在4%以内。设计航速为19kn,偏差较小,所以从整个数值模拟结果来看,能满足应用要求,均有一定的使用价值。
数值模拟和试验结果有一定的偏差,其原因是:1) 湍流模型都是SSTkω-,可能并不能完全模拟真实的湍流;2) 边界条件:入口湍流特征量的给定是基于经验公式,未能保证与试验一致;出口边界条件使用自由出流,也未能保证与试验一致,因此可能导致一定的偏差。3) 船体由网格来离散,目前的网格数量可能还不能完全保证离散后的船体和真实的船体完全一致。
2.3 船模自航数值模拟结果分析
对于船模自航数值模拟,商业软件SHIPFLOW是基于纯粹自航法进行数值模拟的,即根据船模速度 Vm时的强制力 FD值,事先在船模上予以扣除,使得拖曳力Z等于强制力 FD,然后调节螺旋桨的转速,使其发出的推力恰能克服阻力(Rm- FD),保持船模速度与拖车的速度 Vm相等。
船模自航数值模拟的区域和网格划分,边界条件的设定和湍流模式的选择与阻力模拟相一致,额外加入了螺旋桨敞水特征数值和螺旋桨的转速及转向,模拟了真实的螺旋桨运动。
计算3个速度点的自航,傅汝德数Fr分别为0.221、0.233和0.239,换算到实船的航速分别是18kn、19kn和19.5kn,设计航速为19kn,图7和图8为自航因子和推进效率成分随航速变化的分布,并给出了船模自航试验结果和数值计算结果。从中可以看出,随着航速的增大,自航因子和各推进效率大小变化不大,但试验结果和模拟结果仍有一定的偏差。对于伴流分数WT与试验值的偏差绝对值在8%左右;对于推力减额t与试验值的偏差绝对值在11%左右,因其本身值就较小,因此预报精度较差。对于推进效率各成分,如船身效率hη,由于伴流分数和推力减额与试验值的偏差相对稍大,导致船身效率的偏差在5%左右;相对旋转效率rη与试验值的偏差在8%左右;敞水效率0η和总的推进效率Dη与试验值的偏差较小,都在3%以内。
螺旋桨敞水性征曲线是评估螺旋桨性能的一项重要指标;船模总阻力系数与真值的偏差会导致实船有效功率与真值的偏差;实船有效功率与真值的偏差和总的推进效率Dη与其真值的偏差共同导致推进器收到功率PD与真值的偏差。文中,螺旋桨敞水推力系数KT、扭矩系数KQ和敞水效率0η、船模总阻力系数Cts和总的推进效率Dη与试验值的偏差相对较小,最终也致使推进器收到功率PD与试验值的偏差也较小,因此该方法对螺旋桨性能、船体线型性能和船体、桨及舵之间的相互配合效果的评估有一定的作用,对航速的预估也有一定的指导意义。

图8 推进效率成分和偏差
3 结 语
文中假定试验值为真值,分析数值模拟结果的精度,根据上述分析结果可以得到如下结论:
1) 对于螺旋桨敞水数值模拟,性征曲线的计算结果与试验结果在0.4~0.7的范围内吻合得较理想。推力系数KT、扭矩系数KQ的数值模拟结果和试验结果基本一致,只是在斜率上稍有偏差;敞水效率偏差都较小,而设计点在J=0.7附近;进速系数较大或较小的区域预报精度稍显不足。
2) 对于船体阻力数值模拟,计算结果与试验值比较,前两个航速偏差稍大,在5%左右,后3个航速偏差较小,在4%以内。设计航速为19kn,偏差较小。
3) 对于自航数值模拟,随着航速的增大,自航因子和各推进效率大小变化不大。伴流分数WT与试验值的偏差绝对值在8%左右;推力减额t与试验值的偏差绝对值在11%左右;船身效率hη与试验值的偏差在5%左右;相对旋转效率rη与试验值的偏差8%左右;敞水效率oη和总的推进效率Dη与试验值的偏差较小,都在3%以内。
[1] 陈 康,周志勇,魏菲菲. 基于CFD技术的散货船线型优化研究[J]. 上海造船,2011, (1): 50-54.
[2] 王福军. 计算流体动力学分析-CFD软件原理与应用[M]. 船舶力学,2005, 9(2).
[3] 王 健,李海涛. 计算流体力学方法在船舶领域的实用性研究[J]. 船舶与海洋工程,2012, (4): 6-11.