星地激光通信复合轴APT系统仿真研究
2013-09-26杨宜,杨震
杨 宜 , 杨 震
(1.中国科学院 空间科学与应用研究中心,北京 100190;2.中国科学院大学 北京 100190)
由于激光具有频率高、波长短、方向性好、远离电磁波谱等诸多特点,使得星地激光通信相较于微波通信具有高带宽,小天线口径、保密性高、抗干扰能力强等优点[1]。因此,星地激光通信已成为解决微波通信瓶颈、构建天基信息网、提高通信效率和安全性的有效手段,具有很大的民用和军用潜力。同时激光作为理论上绝对保密的量子通信中量子信号的载体,激光通信相关技术成为构建星地量子链路和全球的量子通信网络的关键技术。
在星地激光通信中,由于通信距离远、光束窄,同时存在系统误差和外界干扰(如大气散射、平台振动等),必须采用捕获、瞄准、跟踪(Acquisition、Pointing、Tracking,APT)系统来维持通信链路。通常激光通信采用的发散角非常小(20 μrad左右),而且在大气信道长距离的传输过程中光能损失很大,接收端探测器上的光信号往往很微弱,因此要求APT系统有很高的精度和稳定性。
由于APT系统转台惯量较大,使得其跟踪速度慢,系统带宽较低,同时存在较大的机械误差,无法单独完成高精度的跟踪任务。这些缺点需要小惯量、高带宽满足高精度任务误差要求的跟踪系统来弥补,但是该系统通常跟踪范围小,无法完成大范围的捕获跟踪任务。只有将两者结合,构成复合轴跟踪系统,才能完成APT系统的跟瞄任务,通常前者叫做粗跟踪回路,后者称为精跟踪回路。在空间激光通信APT复合轴系统中,精跟踪系统克服粗跟踪残余误差的能力主要反映在克服主轴中频随机噪声误差,平台抖动和高频大气抖动的能力上[2]。
文中通过研究复合轴APT系统的驱动机构模型和控制模型,分析影响系统跟踪性能的外部噪声和系统误差,建立了完整的APT系统仿真模型。在此基础上验证了复合轴APT系统在不同条件下的跟踪性能。
1 复合轴APT系统数学模型
从仿真对象上来看,APT系统仿真对象主体部分包括粗跟踪回路和精跟踪回路,卫星平台的振动,大气信道的抖动是影响系统工作性能的重要因素,也作为独立的仿真对象。
1.1 复合轴APT系统构成和工作原理
复合轴APT系统由两个伺服环嵌套构成:低带宽的粗跟踪回路和高带宽的精跟踪回路。粗跟踪回路主要包括了万向转台,CCD传感器,粗跟踪控制器和无刷直流电机。精跟踪回路由PZT驱动的快速倾斜镜 (FSM)、CCD传感器、精跟踪回路控制器组成。
系统的工作原理如下:在通信开始阶段,APT系统通过预测的目标方位,确定初始转台指向并进行目标的扫描捕获。当目标信标光进入精跟踪回路视场后,启动精跟踪回路。跟踪过程中若目标失锁,脱离精跟踪回路视场,则重新进行捕获跟踪。由于精回路执行机构跟踪范围小,为了在跟踪过程中避免精回路输出超出其执行范围,将粗回路跟踪误差(脱靶量与粗回路输出之差)作为精回路的控制输入,以保证精跟踪回路执行机构在其有效工作范围内;由此得到复合轴APT的系统结构如图1所示[3]。
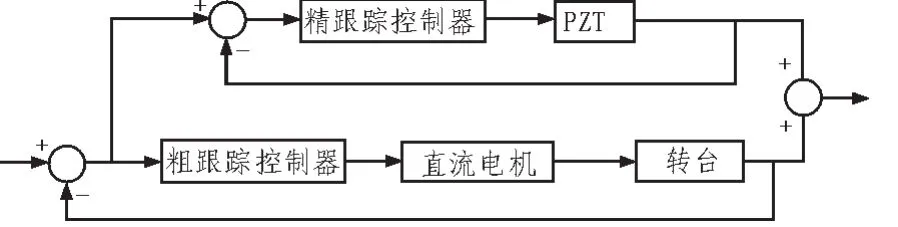
图1 复合轴APT系统框图Fig.1 Compound-axis APT system diagram
1.2 粗跟踪回路数学模型
粗跟踪回路主要的建模对象包括驱动转台的直流电机和直流电机控制器。无刷直流电机动态方程如下
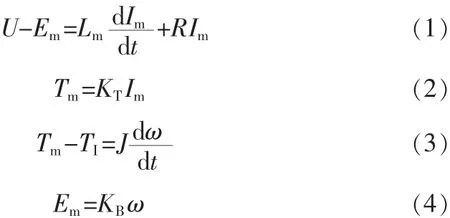
其中,U 为输入电压(V);Em为电枢反电动势(V);Lm为电机电枢绕组电感(H);Im为电枢电流(A);R为直流电机总电阻(Ω);Tm为电磁转矩(N·m);Kt为电机力矩常数(N·m/A);Tl为负载力矩 (N·m);J为转子和负载总的转动惯量(kg·m2);ω 为输出角速度 (rad/s);KB为电机反电动势常数(V·s/rad)。
对(1)(2)(3)(4) 进行拉氏变换,可得直流电机动态传递函数如下:

其中 TM=RJ/(KBKT)为机械时间常数,TE=Lm/R为电气时间常数。
粗跟踪是一个典型的直流电机位置伺服系统[5],采用速度调节和位置跟踪双闭环控制。其中速度回路采用PI控制,位置回路使用PID控制器。根据对直流驱动转台系统进行试验分析,得到 TE=0.001 2,TM=0.05,KB=0.047 7。 运用 MATLAB设计速度回路PI控制器和位置回路控PID控制得到粗回路的开环结构如图2所示。

图2 粗跟踪回路开环框图Fig.2 Coarse open-loop diagram
1.3 精跟踪回路数学模型
根据PZT的结构特点,可以将其传递函数等效如下[6]。

根据频率特性曲线拟合,可以得到式(6)中的比例系数k,阻尼系数ξ和无阻尼振荡系数ωn。使用MATLAB对其进行PI控制器设计,得到精跟踪回路开环结构如图4所示。
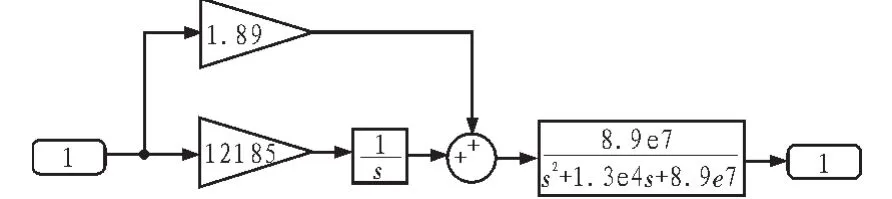
图3 精跟踪回路开环框图Fig.3 Fine open-loop diagram
1.4 平台振动及大气抖动模型
由于不同因素引起的振动原理和持续时间各不相同,不同卫星平台的影响因素也有差别,很难从理论分析的角度得到完整的振动信息,通常采用试验测试的方式得到卫星平台的振动功率谱。典型的卫星平台振动功率谱密度可以近似表示为:

当激光在大气中传播时,由于大气湍流影响到达接收端的光束波前相位发生畸变,低频变化使光斑中心产生漂移现象。有研究表明,光斑在视场单一方向上的漂移半径服从高斯分布,建立光斑漂移的概率模型如下:

其中r为单方向上漂移量,rc为该方向上的漂移量的方差。
根据光斑漂移的频谱特性[7]设计滤波器,传递函数为:

2 仿真实验与分析
基于MATLAB/Simulink图形化环境建立复合轴APT系统的仿真模型,分析复合轴 系统在不同环境下的性能。下面仿真实验中的角度单位均采用μrad。
选择平台运动模型的等效正弦信号为[2]:θ(t)=35 000 sin(0.1t);设式(7)中 f0=20;根据实验数据[9]近似得到 rc=6 μrad。
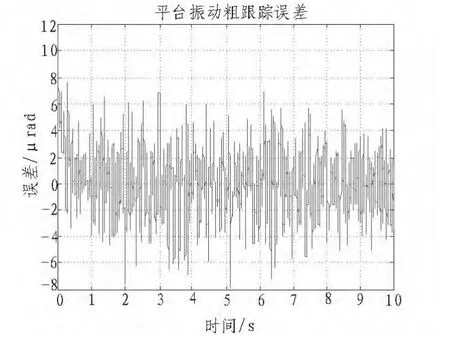
图4 平台振动粗跟踪误差Fig.4 Coarse error of platform vibration
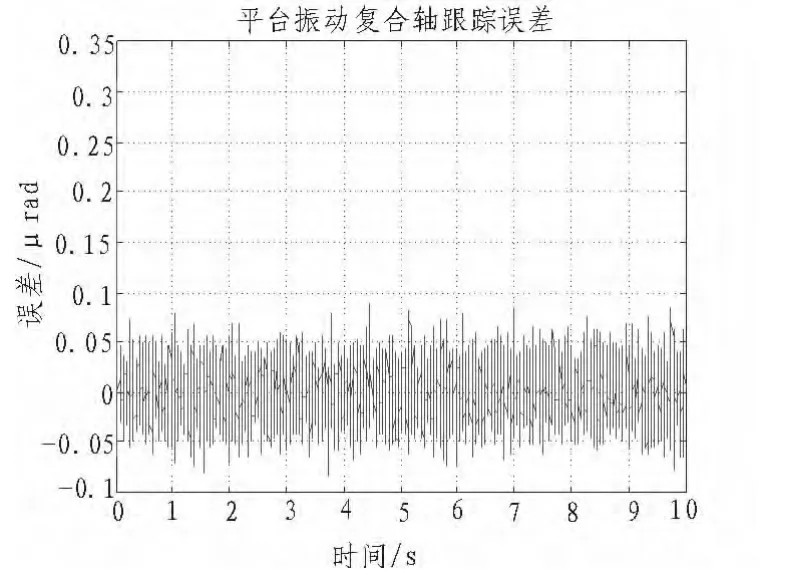
图5 平台振动复合轴跟踪误差Fig.5 Compound-axis error of platform vibration
图4和图5分别显示的是在平台运动信号上加入式(16)描述的平台振动后粗跟踪回路和复合轴跟踪系统分别产生的跟踪误差。从图中可以明显看出粗跟踪系统误差较大,达不到跟踪精度的要求,而复合轴系统将平台振动抑制在0.1urad以下,可以满足激光通信任务的需要。由于粗跟踪系统的带宽较窄,对于高频的振动并不敏感,会产生较大的跟踪残差,而复合轴中的精跟踪回路具有高带宽,对于快速变化的信号有好的跟踪性能,起到了消除粗跟踪回路残差的作用。

图6 大气抖动复合轴跟踪误差Fig.6 Compound-axis error of atmosphere turbulence
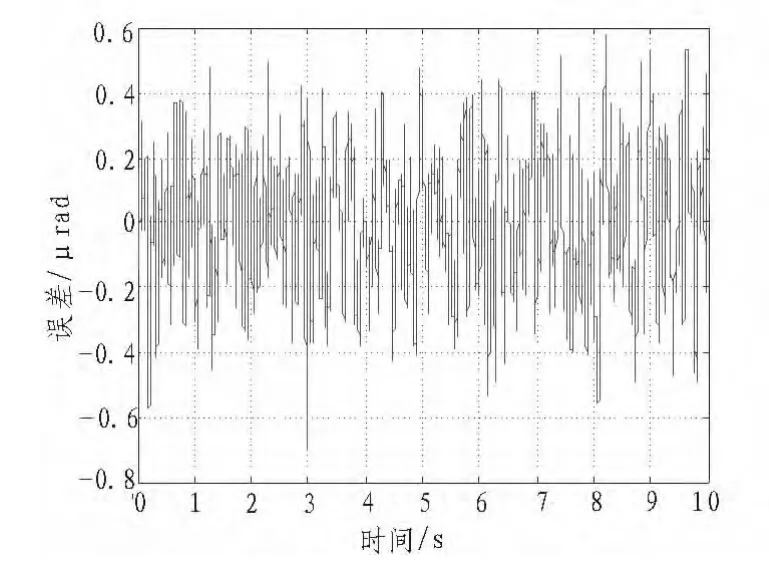
图7 大气抖动粗回路跟踪误差Fig.7 Coarse error of atmosphere turbulence
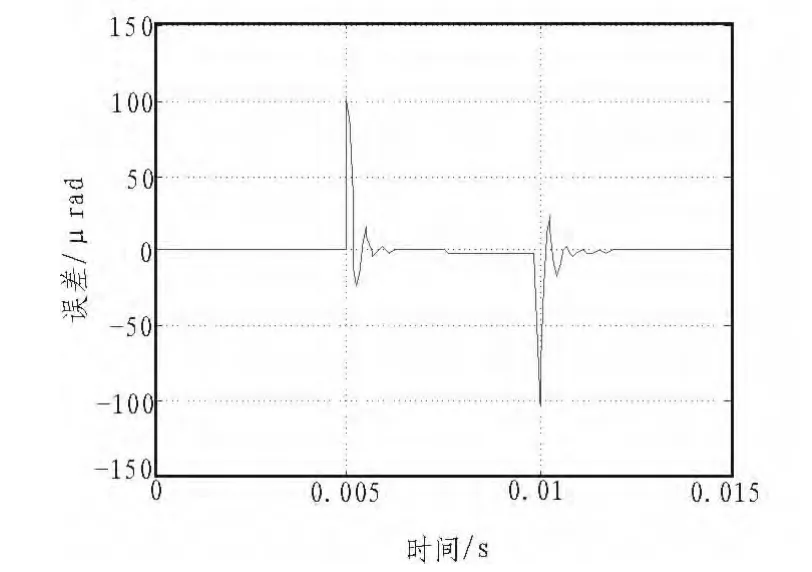
图8 离散扰动复合轴跟踪误差Fig.8 Compound-axis error of discrete disturbance

图9 离散扰动复合轴跟踪误差Fig.9 Coarse error of discrete disturbance
使用周期为0.005 s的脉冲信号模拟一段持续0.005 s的离散扰动,对比图8中复合轴抑制后的误差和图9中粗回路抑制后的误差可以看到,复合轴系统具有比粗回路系统具有更低的抑制误差和更快的抑制速度。
3 结 论
文中通过分析直流电机转台和压电陶瓷振镜的数学模型,并分别设计控制器,在此基础上构建了由粗跟踪回路和精跟踪回路互补的复合轴APT系统模型。通过分析平台振动和大气抖动,建立了以振动功率谱和光斑漂移分布函数表示的扰动源。仿真实验结果表明,复合轴系统具有良好的运动跟踪性能,同时具有很强的高频扰动能力。可以用来指导实际系统的设计。
[1]付强,姜会林,王晓曼,等.空间激光通信研究现状及发展趋势[J].中国光学,2012,5(2):116-125.
FU Qiang,JIANG Hui-lin,WANG Xiao-man,et al.Research status and development trend of space laser communication[J].Chinese Optics,2012,5(2):116-125.
[2]黄海波,左韬,陈晶,等.复合轴精跟踪系统伺服带宽的优化设计[J].红外与激光工程,2012,41(6):1561-1564.
HUANG Hai-bo,ZUO Tao,CHEN Jing,et al.Optimum design of servo bandwidth for fine tracking subsystem in compoundaxis system[J].Infrared and Laser Engineering,2012,41(6):1561-1564.
[3]胡贞,姜会林,佟首峰,等.空间激光通信终端ATP技术与系统研究[J].兵工学报,2011,32(6):752-757.
HU Zhen,JIANG Hui-lin,TONG Shou-feng,et al.Research on ATP system technology of laser communication terminal in space[J].Acta Armamentaarii,2011,32(6):752-757.
[4]周儒勋,张泽龙,亓迎川.直流电机模型参数的直接辨识[J].计算机仿真,2006,23(6):113-115.
ZHOU RU-xun,ZHANG Ze-long,QIYing-chuan.Direct identification of DC electromotor model parameter[J].Computer Simulation,2006,23(6):113-115.
[5]苏显方,张著洪.基于三环PI控制的BLDCM位置伺服系统在线跟踪[J].测控技术,2009,28(10):50-55.
SU Xian-fang,ZHANG Zhu-hong.Three-loop PI controllers based online tracking for BLDCM position servo system[J].Measurement and Control Technolegy,2009,28(10):50-55.
[6]邵兵.激光星间通信终端精瞄微定位系统关键技术的研究[D].哈尔滨:哈尔滨工业大学,2006.
[7]饶瑞中,王世鹏,刘晓春,等.湍流大气中激光束漂移的实验研究[J].中国激光,2000,27(11):1011-1014.
RAO Rui-zhong,WANG Shi-peng,LIU Xiao-chun,etal.Experimental study of spot dancing of laser beam in a turbulent atmosphere[J].Chinese Journal of Lasers,2000,27(11):1011-1014.
