基于加速度传感器的油井功图位移测量的算法设计与优化
2013-09-26王永举
王永举
(河海大学 能 源与电气学院, 江苏 南 京 2 10000)
油井示功图的位移测量,是油井运行的一个关键参数,也是示功图用来诊断产量和判断油井运行状态的一个重要指标。以往的位移测量,曾经采用拉线法测量[1],此法精度较高,但不易维护。这种测量方法的优点是物理原理简单,精度很高,缺点是测量仪器笨重,内部机械部件多,加工复杂,使用中经常出现线被绞断的情况,给维护带来很大的麻烦。现采用测量加速度,本设计采用新的测量位移的方法,主要是结合数字滤波和自适应滤波设计,采用新的积分求位移算法[2],使得对示功图位移测量的精度有了很到的提升,并且,对于那些冲程或者冲次异常的油井,也获得很高的精度,实验结果很好。
1 硬件设计
本设计采用采用ADXL202,是一种差容式伺服加速度传感器,将敏感元件和信号调理电路集成在单片集成电路上,形成一个完整的加速度测量系统。
加速度芯片的数字输出信号为一个方波信号,整个方波的占空比反映悬点加速度的大小和方向,芯片手册给出的计算公式为:

在竖直方向上,向下为正,向上为负。T2根据芯片外接电阻RSET可调,DC0g为芯片水平放置时,输出波形的占空比,即0g所对应的值;L为1g加速度所对应的百分比比率。
对于加速度芯片,只需测量T1,利用单片机的硬件定时器(Timer)协调操作,便可实现对上述两个信号的测量。硬件所需的连接相对简单,将竖直方向的数字脉冲输出引脚XOUT与Timer0的捕获引脚 TIM0_CAP(图中的ADC1)相连即可,如图1所示。

图1 加速度传感器硬件连接图Fig.1 Structure diagram of Acceleration sensor hardware connection
采集信号时,首先用单片机的一个定时器定一个时间间隔,作为采样间隔C(计算周期时,这个采样间隔为150 ms),没到定时结束后就定时触发中断,在该定时器的中断处理中再利用另一个定时器捕获(Capture)加速度芯片的上升沿或者下降沿信号,原理是当信号上升沿或下降沿时触发中断,读取在时间间隔内时钟计数,前后两个脉冲计数值相减,然后乘以一个定时器的时钟周期即可实现对T1的测量[3]。如图2所示。
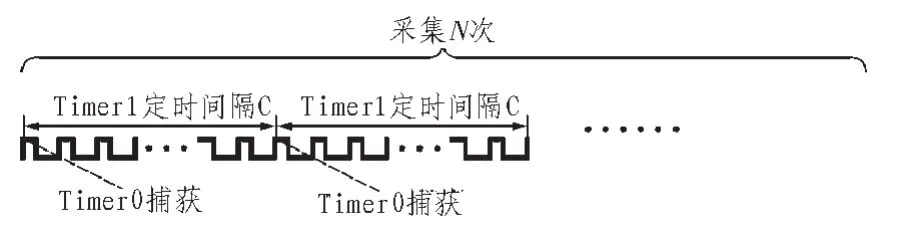
图2 加速度采集示意图Fig.2 Structure diagram of acceleration acquisition
这样就可以测得每一个采样点的加速度值,但是对于油田的实际情况,抽油机在运行的时候,井下情况复杂,几乎不能保持在运行时的平稳,会经常发生瞬间抖动,而这些抖动,对于加速度传感器来讲,会产生一个误差脉冲,这个误差,会使得瞬间采集的加速度严重失真,为了克服这个现象,结合硬件设计,采用新式的采点模式。以往的数据采集,每一次采点间隔的时间大约在150 ms到240 ms之间,在每到那个采集时间的点,开一次中断,采集一次数据,我们经过试验发现,由于瞬间抖动或者不规则运动带来的严重误差,采集的数据,不规律,毛刺现象严重,这样的数据,并不适合作为工程上的数据来源,对周期的计算判断造成很大的影响。
针对此现象,本次设计做这样处理,在本应该才一个数据点的时候,瞬间采集多个点,在负责定时的定时器中断产生后,中断调用另一个定时器捕获时,捕获的子函数中,利用循环结构,采集多个加速度的值,开一个临时数组,并将这个瞬间采集到的加速的做一个处理,采用的是取加权平均的方法,得到一个加权平均值,把这个值作为这个点的瞬时加速度,这样子,经过现场的测试,可以在很大程度上避免瞬间的抖动对我们数据采集的影响。原理如图3所示。
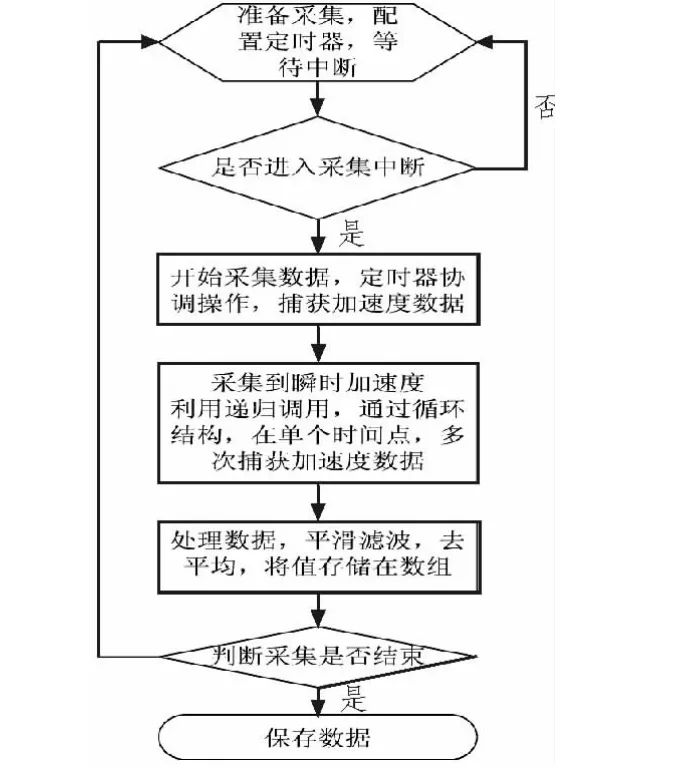
图3 加速度采集流程图Fig.3 Process flow diagram of acceleration acquisition
2 数据处理
2.1 计算抽油机运行周期T
为了测得正弦波的周期,我们采用基于数字滤波算法和自适应数字滤波的算法来测算周期。
获取T的值,是测量功图位移的关键,本设计通过采集的800点加速度数据,通过数字滤波算法和自适应数字滤波处理,得出抽油机的运行周期[4]。
2.2 数字滤波设计
数字滤波[5],主要是通过对原始信号进行合理的多项式变换。在实际的工程应用中,常用的数字滤波方法包含:粗大误差的判定与剔除、限幅平均滤波、递推滑块滤波、遍历查找极值、极值点判断与归并。
“粗大误差的判定与剔除”是拉伊达法则,首先,求取采样值的平均值,查找与均值差大于3倍标准差的粗大点,并且用粗大点的前后两个点的平均值去替代,初步排除粗大误差的采样点。
“限幅平均滤波”是基于实际的加速度必然是平滑过渡的,不会出现突变。计算方法是通过检测相邻两个点的差值的绝对值,对这个差值的绝对值进行限定。
“递推滑块滤波”即滑动平均滤波[6],是实际应用中很有效的而且应用非常广泛的时域滤波方式,能够有效的抑制随机噪声,同时不损失陡峭的边沿信号,具体的方法是就是用点i后N个点(包括点i点本身)的平均值来代替点i的值,表达式为:Xi=(Xi+Xi+1+…+Xi+N-1)/N
经过前面做了一系列的平滑限幅,在极大值或者极小值点处,可能会出现很多的相等的极值点,这样在最后判断周期时,就出现失误,鉴于此,我们还需要对遍历所得的极值点进行判断,若是在同一个波峰处有多个极值点,需要进行归并,极值点的判断至关重要,周期的计算,主要依据各个波峰(波谷)之间的差值去计算。
2.3 自适应数字滤波设计
为了使周期测算的更加精确,通过实时跟踪输入信号周期的的变化,自动调整参数的滤波方法,提高周期测算的精确性[7]。基于上面的算法,我们已经可以得到一个周期,并且在很多的周期在20 s左右的油井上精度很高,但随着实验的深入,我们发现一个问题,就是对特别周期很长或者很短的油井,我们的滤波算法的效果不好,误差很大
基于上述的问题,采用一种自适应的算法,我们在第一次采集加速度计算周期的时候,我们检测,假如算出来的粗周期小于一个下限阀值或者大于一个上限阀值的时候,我们程序会自动检测,然后根据变化,改动采样间隔,从新采集加速度,继续计算,流程如图4所示。
3 计算位移
得到周期后将进行由加速度获取位移。在计算位移上,遇到一个问题,在又加速度计算位移的时候,积分需要初始边界条件,但是测得的加速度没有这个初始条件,经过查阅文献,最后采用一种加速度二重积分计算位移的新算法。
首先,根据加速度的线性叠加原理,


图4 自适应流程图Fig.4 The adaptive process flow diagram
其中 A(t)为芯片实测值、a(t)为实际的悬点加速度、G 为重力加速度。
在时刻一个周期范围T内,由牛顿定律有

由于抽油机的周期性运动,有
则式(2)可化

对a(t)进行积分得到速度公式

同样考虑抽油机运动的周期性,在一个采油周期结束后回到原点,有 S(T)=S(0),
速度公式变为

最后,设位移的起始点位移为零,得到相对于起始点的位移计算公式

据以上推导最终得出结论:某时刻,抽油机悬点加速度的值等于该时刻加速度传感器的测量值减去一个周期加速度测量值的平均值;在边界为零的条件下,对t时刻悬点加速度积分得到速度,并将该速度值减去一个周期内所有积分速度的平均值,即可得到该时刻修正后的速度值;在边界为零的条件下,对速度积分得到相对位移。
该算法的特点,是以一个周期T内的加速度传感器采集值为研究对象,以初始采集点为参考点,最后需将求出的位移的参考点转换为“下死点”。
4 位移计算结果
现场实际的测试结果如表1所示。
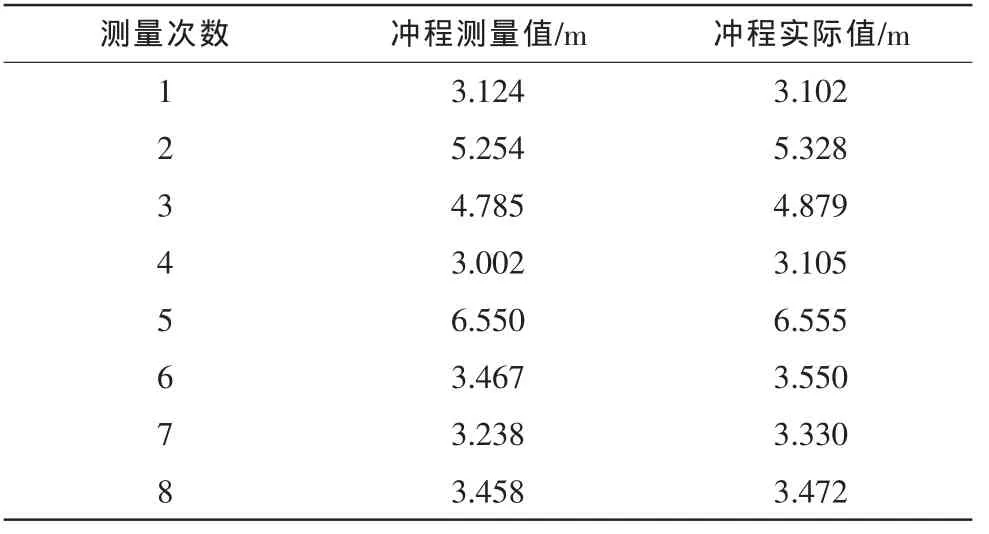
表1 位移测试结果Tab.1 Test result of stroke
由实验数据知道,经由我们算法得出的冲程位移的测量误差在5%以内,精度很高,同时,可以通过表格发现,对于冲程很长或者很短的油井,测量精度很好,说明该算法通用性很强,适用于多种情况的油井,有较好的推广价值。
5 结束语
到此,完成了介绍由采集加速度,测算周期[8],到计算位移的一个完整的算法设计和硬件设计过程,为得到最后示功图做了准备。在实际应用中,该算法在单片机中实现简单,硬件资源占用少,同时测量精度很高。该设计在江苏油田得到大力推广,江苏油田的试采一厂和试采二厂采用的本设计的算法,取得了良好的经济效益和社会效益,充分验证了该设计的合理性和实用性。
[1]彭健.基于传感器技术的油井示功仪的研究[J].传感器技术学报,2012(12):1701-1704.
PENG Jian.Research on well dynamometer based on sensor technology[J].Chinese Journal of Sensors and Actuators,2012(12):1701-1704.
[2]张家珍.基于加速度传感器的示功图测试与分析系统研究[D].北京:中国石油大学,2008.
[3]许亚男,高清维,翟寄文,等.基于MAX197的高精度数据采集系统[J].电子技术,2009(6):22-23.
XU Ya-nan,GAO Qing-wei,ZHUO Ji-wen,et al.A high accuracy data acquisition system based on MAX197[J].Electronic Techniqy,2009(6):22-23.
[4]寇攀峰,吕强中.合理选择基于单片机的数字滤波方法[J].微处理机,2004(1):76-79.
KOU Pan-feng,LU Qiang-zhong.How to choose a good digital filter on single chip computer system[J].Microcomputer Processing,2004(1):76-79.
[5]梁志国.信号周期的一种数字化测量方法[L].仪器仪表学报,2003(4):195-198.
LIANG Zhi-guo.The per iod prec ise evaluation of per iodicwaves[L].Chinese Journal of Scientific Instrument,2003(4):195-198.
[6]赵毅,牟同升,沈小丽,等.单片机系统中数字滤波的算法[J].电测与仪表,2001(6):178-182.
ZHAO Yi,MOU Tong-shen,SHEN Xiao-li,et al.Digital filtering algorithm in SCM system[J].Electrical Measurement and Instrumentation,2001(6):178-182.
[7]朱恒军,王发智,姚仲敏,等.基于单片机的数字滤波算法分析与实现[J].齐齐哈尔大学学报,2008(6):56-58.
ZHU Heng-jun,WANG Fa-zhi,YAO Zhong-min,et al.Analysis and implementation of digital filtering algorithm based on single chip microcomputer[J].Journal of Qiqihar University,2008(6):56-58.
[8]施先旺,刘婷婷,李国良.采用有限状态机实现控制指令的可靠检测[J].火箭推进,2011(5):63-68.
SHI Xian-wang,LIU Ting-ting,LI Guo-liang.Control instruction detection realized by finite state machine[J].Journal of Rocket Propulsion,2011(5):63-68.