复杂背景下车辆跟踪的改进算法及逆行检测
2013-09-25王秉政杨晨晖
郭 锋, 王秉政, 杨晨晖
(1. 郑州轻工业学院计算机与通信工程学院,河南 郑州 450002;2. 厦门大学信息科学与技术学院,福建 厦门 361005)
复杂背景下车辆跟踪的改进算法及逆行检测
郭 锋1, 王秉政1, 杨晨晖2
(1. 郑州轻工业学院计算机与通信工程学院,河南 郑州 450002;2. 厦门大学信息科学与技术学院,福建 厦门 361005)
针对复杂背景下车辆跟踪准确率低的情况,提出了一种改进的算法,采用多边形车辆跟踪窗口和更准确的预测搜索区域,进行多特征匹配车辆的跟踪算法,并应用于道路的车辆逆行检测。实验结果表明,该算法在满足实时性和稳定性的前提下,提高了车辆跟踪的准确率。
车辆跟踪;多特征匹配;复杂背景
车辆跟踪是计算机视觉应用的重要内容,特别是在智能交通视频监控方面,车辆跟踪是交通事件判断、解决城市拥堵等的前提,目前有很多车辆跟踪的算法,大致分4类:基于区域的车辆跟踪[1],基于特征的车辆跟踪[2],基于模型的车辆跟踪[3],基于活动轮廓的车辆跟踪[4]。这几种算法,在简单背景下,效果不错,但是,在道路交通视频中,交通场景的动态变化,有雨天路面反光,车灯,树影等干扰因素,为了提高在复杂背景下车辆跟踪的准确率,本文提出了采用多边形车辆跟踪窗口和更准确的预测搜索区域,进行多特征匹配车辆的跟踪算法,并应用于道路的车辆逆行检测。
1 改进的基于多特征匹配车辆跟踪算法
在道路监控视频中,上下帧图像时间差很小,根据运动规律,车辆信息在上下帧图像中具有较大的相关性,车辆位置,速度,形状等特征都很有相关性。因为在复杂场景下,很多干扰因素的存在,要求我们更加精确高效的跟踪,本文提出了一种改进的算法,该算法分5个模块:(1)检测道路中车辆,使用更小的多边形跟踪窗口来检测和跟踪车辆;(2)提取各车辆典型特征,例如车辆形体的形心位置,形状,面积等特征;(3)在车辆速度和形体形心的基础上,利用卡尔曼滤波[5-7]得到车辆的位置,设计出更准确的搜索窗口;(4)根据相似度函数进行车辆的多特征匹配;(5)更新车辆列表模型。
1.1 车辆跟踪窗口和搜索窗口的设计
检测到车辆并且跟踪,首先要设定车辆的跟踪窗口,跟踪窗口的尺寸略大于目标图像,在复杂道路环境下,希望跟踪窗口紧紧套住目标图像,使目标不受跟踪窗外背景和噪声干扰的影响。本文根据车辆形体的规则,使用多边形来圈车辆,使跟踪窗口更小,来跟踪车辆的运动。
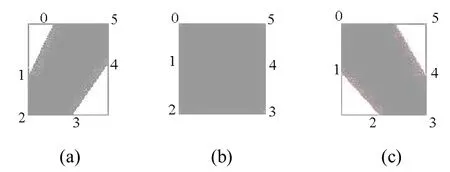
图1 车辆形体在外接矩形框的位置
下面,我们检测到一辆车,根据上下帧图像的相关性可以得知很多相关的信息,可以根据车辆位置和速度判断车辆在下一帧的更加准确的区域,设置搜索窗口进行搜索。检测区的实际长宽可实际测量得到,可对应计算到图像的像素点上,例如车辆形心在上下两帧运行多少个像素点,可对应计算出车辆的运行速度v,可得,

fVehicleInSpeed为车辆的速度,iVehicleCenteri车辆在第i帧图像的形心坐标值,t为上下两帧图像的时间间隔。
采用卡尔曼滤波器可以得到车辆在下一帧图像的形心,以该点为中心,去 2v为该搜索窗口的边长,这样可以得到更加具体准确的搜索窗口。
1.2 车辆多特征匹配和车辆列表模型
对于第k帧图像检测到m个车辆记为

在第k+1帧图像检测到n个车辆记为

第k帧图像的ri车辆根据搜索窗口搜索得到z个车辆,记为
1) 假定第k帧图像的第i个车辆形心点坐标为,依据速度预测而得到的该车辆在第k+1帧图像的形心点坐标为,在搜索区域搜索可1得到的第k+1帧的第j个车辆的真实形心点坐标为。根据车辆和待匹配车辆的坐标位移像素度函数可用下公式:
2) 定义车辆形体面积差别函数:用第k帧图像的第i个车辆的形体面积Ai和第k+1帧图像的第j个车辆的形体面积Aj比较,形体相交面积为A,根据第车辆和待匹配车辆的面积相似度函数可得公式表示为:

3) 定义车体形状差别函数:已知车辆形体Ri和待匹配车辆形体Rj,车辆形体上部宽度是HWi和HWj,车辆形体下部宽度是TWi和TWj。则车辆和待匹配车辆的形状相似度函数可用下公式:
4) 相似度函数

式中,w1、w2、w3是权值,要求w1+w2+w3=1,0≤VR(i,j)≤1。
若D(i,j)大,表明预测位置与带匹配车辆越接近,T(i,j),M(i,j)越大,表明车辆与待匹配形状越相近,VR(i,j)越大,说明车辆和待匹配车辆相似度较高,是同一辆车可能性大。在第k帧图像检测得到m个车辆,假定对于第i个车辆在下一帧预测区域搜索得到z个车辆,对这z个车辆分别计算VR(i,j),那么VR(i,j)最大者表明该车辆为第K帧图像的第i个车辆的后续,按照此方式,可以分别将第K帧图像的其他车辆进行类似匹配,若第K帧图像找不到后续,表明该车辆驶出检测区,若第K+1帧图像有多余车辆,表明为刚驶入检测区的车辆。
2 车辆逆行检测
在道路交通中,有些道路为单行道,此时我们可以将上述算法进行实际应用,进行道路的车辆跟踪并作出逆行违章事件的报警。根据每帧图像的车辆行驶过程,可以得到车辆形体形心的坐标Cg[],根据坐标值我们可以得到车辆的行驶方向,进而做出判断,从T1到T2时刻,车辆形心轨迹为{Cg[i],i=0,1,…n},该时间段,共有n+1帧图像,假定y轴垂直向下为正向(规定车辆行驶方向),则若Cg[k]·y-Cg[0]·y<0,说明车辆逆行,因为复杂背景下,一些干扰因素的存在,直接做出判断容易造成错误,我们要求车辆的运动轨迹形心坐标满足两个条件,可以认为该车辆逆行:
式(6)中DRT是一个规定值,表明检测的帧数的最小值,即大方向上车辆是逆行的。条件式(7)说明在这时间段中,由于干扰因素的影响,车辆轨迹形心坐标可能出现震荡,造成误判,所以要求每次前后两帧的比较中,逆行的情况所占比率较大。同时满足两个要求,我们可认为车辆逆行。
3 实验结果
本文将改进算法进行编程实现,如图2和图3所示,以某市道路的交通视频进行试验,白色矩形线框为检测区域,取α1=0.6, α2=0.4;w1=0.2,w2=0.4,w3=0.4;下图为复杂背景下例如雨天夜晚等干扰较大交通场景下的车辆跟踪效果图和单行道出现车辆逆行违章报警演示效果图。

图2 雨天夜晚的跟踪图

图3 单行道的车辆逆行检测
根据具体城市道路监控视频,进行车辆跟踪及车辆逆行判断,在两个时间段中,分别用参考文献[8]跟踪算法和本文改进的多特征算法进行演示,得出数据如表1和表2所示:
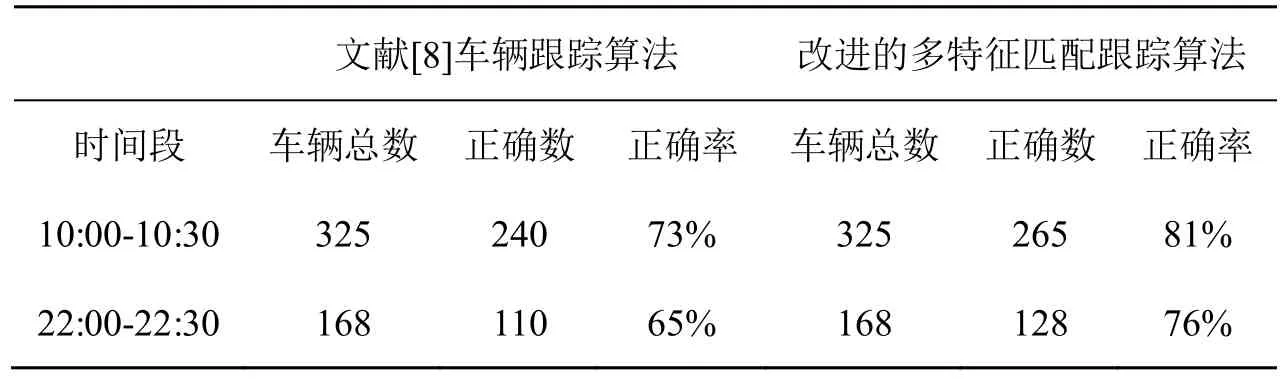
表1 交通视频监控中两种车辆跟踪算法在车辆跟踪中的比较
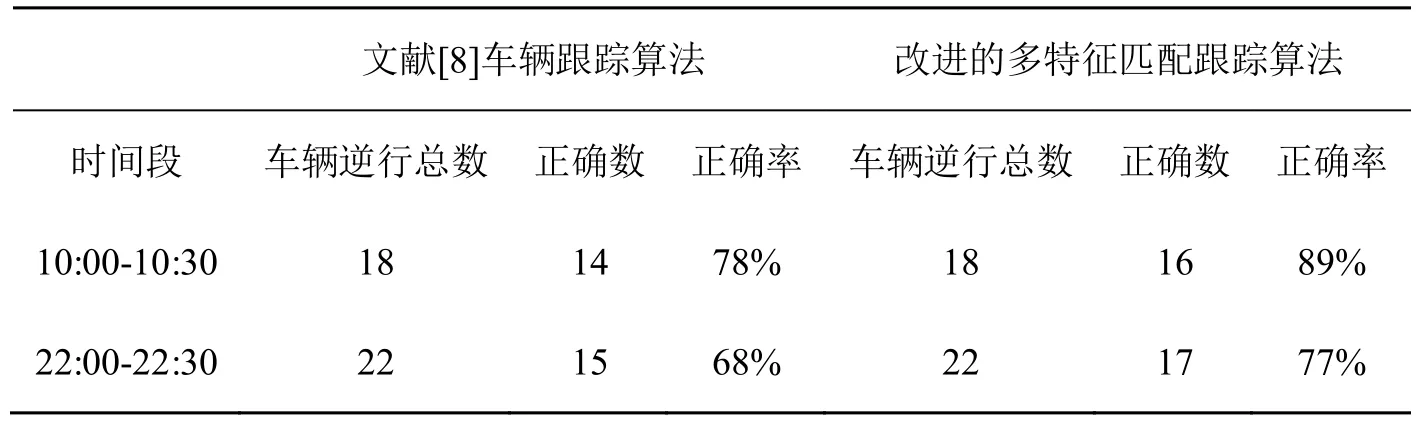
表2 交通视频监控中两种车辆跟踪算法在逆行检测中的比较
通过实验数据可以得到,本文算法提高了车辆跟踪和逆行判断的准确率,在树阴影、夜间车辆灯光及雨天路面反光等干扰因素下取得了更好的跟踪效果,跟踪失败主要集中在两车体过近和晚间车辆远光灯等情况。
5 结 论
针对在复杂交通场景下,干扰因素的影响,车辆跟踪准确率不高的问题,本文提出了一种改进的多特征车辆跟踪算法,检测到车体后,用更精确多边形跟踪窗口对车体进行跟踪,根据预测后采用更准确的搜索窗口,然后根据车辆形心位移,车体面积和车体形状等特征进行匹配实现跟踪的算法,并应用于单行道的车辆逆行检测,试验结果表明,该算法满足实时性要求下,提高了车辆跟踪和车辆逆行检测的准确率。
[1]Paragios N, Deriche R. Geodesic active contours and level sets for the detection and tracking of moving objects [J]. IEEE Trans Pattern Analysis and Machine intelligence, 2000, 22(3):266-280.
[2]Fathy M, Siyal M Y. Real-time image processing approach to measure traffic queue parameters [J].EEEProc.-Vis. Image Signal Process, 1995, 142:297-303.
[3]翁木云, 何明一. 图像综合特征及其在图像检测与匹配中的应用[J]. 中国图象图形学报, 2007, 12(1):121-126.
[4]Wang Y, Wang T E, Shen D G. Lane detection and tracking using B-Snake [J]. Image and Vision Computing, 2004, 22(4):269-280.
[5]肖敬若, 张艳宁, 胡伏原, 等. 一种鲁棒的多目标自动跟踪算法[J]. 信号处理, 2007, 23(3):437-440.
[6]孙 状, 宋正河, 毛恩荣, 等. 高清视频车辆检测及跟踪系统的设计与实现[J]. 中国农业大学学报,2009, 6:97-102.
[7]杨春玲, 余英林, 刘国岁. 多目标跟踪中的数据关联算法[J]. 系统工程与电子技术, 2000, 22(3):11-15.
[8]常发亮, 刘 雪, 王华杰. 基于均值漂移与卡尔曼滤波的目标跟踪算法[J]. 计算机工程与应用, 2007,43(12):50-52.
The Improved Algorithm for Vehicle Tracking and Retrograde Motion Detection under the Complicated Background
Guo Feng1, Wang Bingzheng1, Yang Chenhui2
( 1. Zhengzhou University of Light Industry, Zhengzhou Henan 450002, China; 2. Xiamen University, Xiamen Fujian 361005, China )
To solve the problem of low vehicle tracking accuracy of traditional algorithms in complex background, an improved method is proposed in this paper. It exploits vehicle tracking polygon window and more exact prediction of search area to realize multiple feature matching vehicle tracking, which is applied to detect vehicles retrograde motion. The experimental results show that the algorithm has higher vehicle tracking accuracy while satisfying the need of real-time and stability requirement than traditional ones.
vehicle tracking; multiple feature matching; complex background
TP 391
A
2095-302X (2013)04-0150-04
2012-09-21;定稿日期:2012-10-30
郭 锋(1981-),男,河南省信阳人,讲师,硕士,主要研究方向为数字图像处理与数据库等。E-mail:wwwguofengok@163.com