异步电机空间矢量直接转矩控制的仿真研究
2013-09-21张瑞,高赟
张 瑞,高 赟
(西安科技大学电气与控制工程学院,西安 710054)
异步电机空间矢量直接转矩控制的仿真研究
张 瑞,高 赟
(西安科技大学电气与控制工程学院,西安 710054)
针对直接转矩控制转矩脉动大和开关频率不固定等问题,本文基于空间矢量调制的直接转矩控制进行研究。在Matlab7.0/Simulink的环境下,建立了基于传统直接转矩控制和基于空间矢量调制直接转矩控制的仿真控制模型,通过与传统直接转矩控制控制系统相比较,仿真结果表明采用空间矢量调制后,具有转矩脉动小、开关频率恒定及鲁棒性强等优越性能。
异步电机;直接转矩控制;电压空间矢量调制;圆形磁链;仿真
前言
1 基于空间矢量的直接转矩控制
直接转矩控制具有结构简单、转矩响应快以及鲁棒性好[1]等优点,但由于它采用磁链和转矩的容差控制,滞环控制器只有达到容差上、下限才输出控制信号,进行离散式控制;且电压矢量开关表在每1/6周期只给出两种固定电压矢量进行切换,不可避免地造成转矩脉动大,开关频率不固定的缺点[2]。
针对传统直接转矩控制方法转矩脉动大及开关频率不固定等问题,本文研究基于空间矢量调制的直接转矩控制。为了克服滞环调节带来的不足,SVM-DTC采用PI控制器取代滞环调节器,对磁链和转矩误差进行连续调节控制;为了能使输出电压准确地补偿当前误差,采用基于空间矢量脉宽调制(SVPWM)模块代替电压矢量开关表,误差经过SVPWM模块可合成任意大小方向的电压矢量使其准确进行补偿[3]。在Matlab7.0/Simulink的平台上,对传统 DTC 和SVM-DTC进行建模与仿真,通过仿真表明SVM-DTC能够明显减小转矩脉动和电流谐波分量,一个采用周期内逆变器开通、关断各一次保证了开关频率的恒定。
1.1 空间矢量调制原理
传统的圆形磁链直接转矩控制根据逆变器的8种开关状态得到8种电压空间矢量,将磁链轨迹分为六个扇区[4],每个扇区只能由相邻的两个有效电压矢量和零电压矢量交替作用。而SVM-DTC根据相邻工作电压矢量和零电压矢量合成任意大小和方向的电压矢量,完全准确地补偿当前磁链误差和转矩误差,磁链在扇区3目标电压矢量合成示意图如图1所示[5]。

图1 目标电压空间矢量的合成
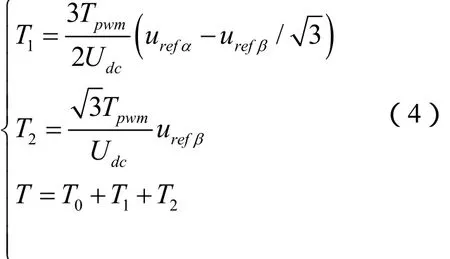
在一个采样周期Tpwm内设相邻两电压u1、u2作用时间分别为T1、T2,则时间关系表示为:

其中,T0为零电压矢量作用时间。根据伏秒平衡原理[2]可得,

将uref投影到βα-坐标得:

参考扇区3同理可推导得出其他扇区与之相邻两电压矢量及零电压的作用时间。根据所在扇区的判断即可知需作用的两相邻电压空间矢量,按上式推导得出各自作用时间,即可得到补偿当前误差的电压矢量。
1.2 SVM-DTC原理结构
基于空间矢量脉宽调制的直接转矩控制系统结构如图2所示。
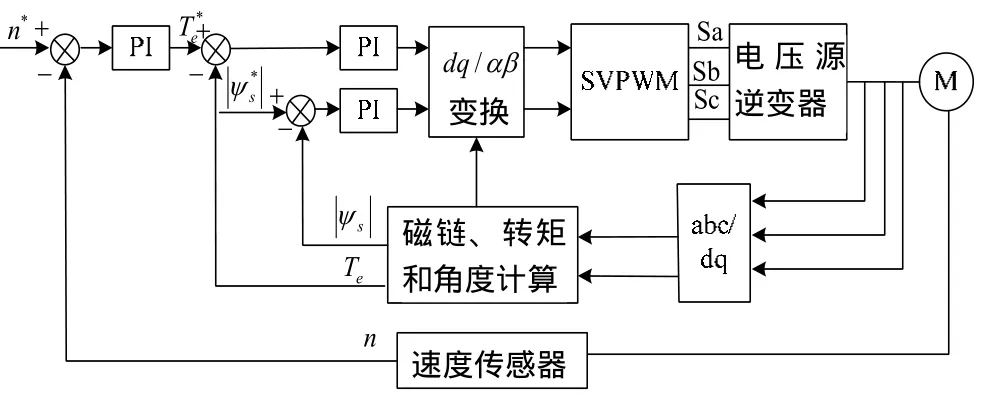
图2 SVM-DTC系统原理框图
检测到的三相静止坐标系下的电压、电流经 3/2变换到两相静止坐标βα-下。根据βα-下电机的磁链和转矩方程估计出磁链分量|ψs|和转矩分量 Te。给定速度n*与通过速度传感器得到的速度n经过PI调节得到转矩给定值Te*。Te*和磁链给定值|ψ |分别与Te、|ψs|经 PI调节得到两相旋转坐标下的电压 uq,ud。dq / αβ模块将两相旋转电压变换到两相静止坐标下。静止坐标系下两相电压经过SVPWM变换给出了逆变器的开关状态去驱动电机。
1.2.1 PI调节
传统直接转矩控制中转矩差值和磁链差值经过滞环调节控制转矩和磁链开关信号,而SVM-DTC中转矩和磁链差值经过PI调节分别得到电压在q、d轴的分量 uq,ud以此来补偿当前转矩和磁链误差的电压矢量。由于传统直接转矩控制中滞环调节器是转矩脉动的主要来源,在SVM-DTC中以PI调节来取代滞环调节,对磁链和转矩误差进行连续的调节。
1.2.2 dq/αβ变换
由于转矩差和磁链差经过PI调节后得到两相旋转坐标下的电压值 uq、ud。但电压空间矢量针对的是静止坐标系,则 uq、ud需变换到两静止坐标系下。其变换关系为[6]:

1.2.3 SVPWM模块
SVM-DTC的关键是在不同的扇区对相邻电压矢量作用时间进行控制。所以SVPWM模块主要是确定参考扇区和相邻电压矢量的作用时间,从而确定电压矢量的切换。SVPWM仿真模块如图3所示。

图3 SVPWM仿真模块
为了方便扇区的计算,对 uα、 uβ做如下变换:

如果 u1>0,则设 A = 1,否则 A = 0;若 u2>0,则设 B = 1,否则 B = 0;若 u3>0,则设 C = 1,否则C = 0;并令 N = A+2B+4C。则,N值与扇区的关系如表1所示。扇区判断仿真模块如图4所示。

表1 扇区的确定
式(3)为磁链在扇区3时相邻电压矢量作用时间的计算方程。由于矢量位置角度不同,则T1、T2计算方程不同。根据扇区不同,T1、T2推演得:


图4 扇区判断模块
仿真模块如图3中XYZ模块所示。

表2 扇区与T1、T2对应关系
三相 PWM 波形按脉冲宽度定义其工作切换点分别为 Ta,Tb,Tc:

三相比较输出PWM波可表示为图3中U、V、W所示。

图5 对称规则采样SVM波形
根据扇区的不同,电压矢量切换点总结如表3所示。仿真模块如图3中子模块Tcom所示。不同扇区三相PWM波形分别为U、V、W的不同组合。
如图5为对称规则采样SVM波形,根据对称规则采样原则,在一个开关周期内电压矢量作用的次序为:u0→ux→ux+60→u7→ux+60→ux→u0,其中ux、 ux+60表示为某一扇区相邻电压矢量。
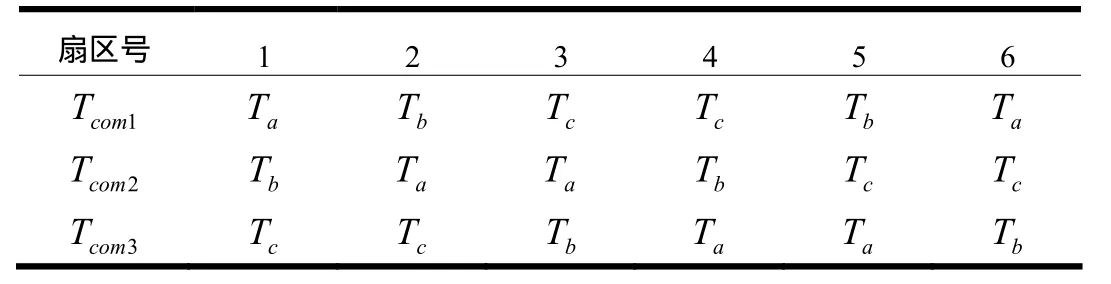
表3 Tcom1、Tcom2、Tcom3 选择
相应作用时间分别为:

由图5可知,在一个开关周期内逆变器开关开通和关断各一次,因此保证了采用SVM-DTC开关频率的恒定[7]。
基于空间矢量的直接转矩控制系统,由磁链和转矩误差经过PI调节后得到补偿当前误差的电压矢量,SVPWM 模块提供电压矢量及其作用时间并以开关信号的形式输出给逆变器去驱动电机。此方法保证了开关频率恒定且消除了滞环调节带来的不足。
2 仿真实验验证
为了验证基于空间矢量调制的直接转矩控制系统的正确性以及相比传统 DTC的优越性能,本文在Matlab7.0/Simulink的环境下,对于传统 DTC和SVM-DTC两种控制方法进行了建模与仿真。
仿真系统中异步电动机的参数为:额定功率PN=2kW,额定电压UN=380V,额定频率fN=50Hz,定子电阻 Rs=3.52Ω,转子电阻 Rr=4.32Ω,定子自感Ls=1.216H,转子自感 Lr=1.216H,定、转子互感Lm=0.800H,极对数 Pn=2,J=0.0075kg·m2,负载转矩初始为0.5N·m,0.15s后负载突变为10N·m。传统直接转矩控制仿真中磁链容差设置为 0.01,转矩容差设置为0.1;SVM-DTC采样周期设为40μs。两种仿真都采用定步长方式,步长大小为2e-6s。
采用传统直接转矩控制方法得到的定子磁链轨迹如图6(a)所示,和传统DTC相对应,采用SVM-DTC定子磁链轨迹如图7(a)所示。
采用传统直接转矩控制方法得到的定子磁链轨迹图,其近似为圆形,但在起动过程由于定子电阻的影响使得定子磁链发生畸变;而采用SVM-DTC定子磁链轨迹脉动小且轨迹光滑。
如图6(b)从上到下分别为采用传统直接转矩控制的相电流、转矩和转速波形;如图7(b)从上到下分别为采用SVM-DTC的相电流、转矩和转速波形。
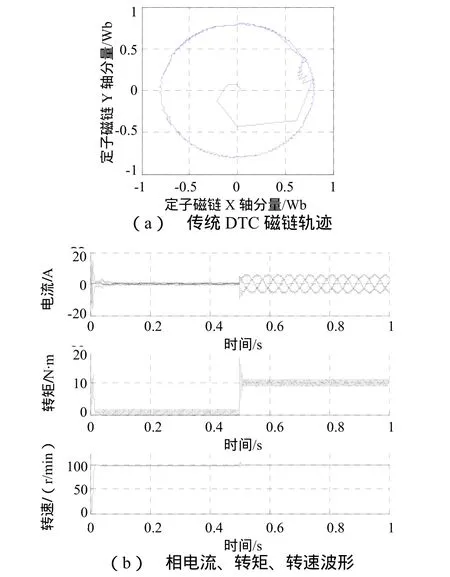
图6 传统DTC响应波形

图7 SVM-DTC响应波形
由仿真结果图 6可见相电流谐波分量大,而图 7其相电流谐波明显减小,正弦波曲线更光滑;观察图6输出转矩,其脉动大于1N·m,虽然可以通过减小转矩调节器的容差限来减小转矩脉动,但这会增加逆变器开关频率,产生不必要的损耗,采用 SVM-DTC方法其输出转矩脉动小于0.05N·m,且能保证其开关频率固定;图6转速波形在0.5s突加负载后,转速发生短暂的波动,采用SVM后0.5s时速度实现平滑过渡,抗干扰能力强。
通过仿真结果图6和图7的比较可知,采用空间矢量调制的直接转矩控制定子磁链轨迹理想,电流谐波分量小,输出转矩脉动明显减小,转速波形平滑且具有较强的鲁棒性,较传统控制方法性能得到极大提高。
3 结论
基于空间矢量控制的直接转矩控制采用PI调节器代替传统控制中的滞环调节,SVPWM 代替电压开关的是矢量表。仿真结果表明基于空间矢量的直接转矩控制有效改善了传统直接转矩控制中圆形磁链轨迹波动严重等问题,磁链轨迹更加光滑;且有效减小了电流谐波分量,抑制了转矩脉动且速度曲线更加光滑,抗负载扰动能力加强,其控制性能较传统直接转矩控制系统得到了极大的提高。
[1] 李祥飞, 王坚, 等. 全速域异步电动机的改进型直接转矩控制[J]. 铁道学报,2007,29(4): 27-31.
[2] 唐浦华, 刘飞, 黎亚元. 感应电机直接转矩控制系统[J]. 电机与控制学报, 2007, 11(1): 1-5.
[3] 吴桂贤. 基于SVPWM的异步电机直接转矩控制研究[学位论文]. 华中科技大学, 2009: 18-19.
[4] 江一, 朱凌, 申仲涛. 异步电动机直接转矩控制仿真研究[J]. 华北电力大学学报 2003, 30(1):10-13.
[5] 魏欣, 陈大悦, 赵春宇. 基于空间电压矢量调制的异步电机的直接转矩控制[J]. 系统仿真学报,2006, 18(2): 405-409.
[6] Kang J K,Sul S K.New direct torque control of induction motor for minimum torque ripple and constant switching frequency[J]. IEEE Trans on Industry Application, 1999, 33(5): 1076-1082.
[7] 孙丹, 贺益康. 基于恒定开关频率空间矢量调制的永磁同步电机直接转矩控制[J]. 中国电机工程学报, 2005, 25(12): 112-116.
审稿人:许善椿
Research and Simulation of DTC Based on SVPWM of Induction Machine
ZHANG Rui, GAO Yun
(College of Electrical and Control Engineering, Xi’an University of Science and Technology, Xi’an 710054, China)
In order to solve the problem of torque ripple and variable switching frequency, a new method of DTC based on space vector pulse width modulation (SVPM) is researched in this paper.Both traditional DTC and the one based on SVPWM are modeled and simulated on the platform of MATLAB. The simulation results indicate that the proposed control method can reduce torque ripple and get constant switching frequency and also have a better dynamic and static performance through the comparison of two models.
induction machine; direct torque control; space vector pulse width modulation; circular flux orbit; simulation
TM343
A
1000-3983(2013)02-0023-26
2012-09-13

张瑞(1987-),女,硕士研究生,研究方向为智能控制。