面向大型载人航天器的多设备组网测量技术应用研究
2013-09-19杨凤龙王国忱
杨凤龙,王国忱,张 杰
(北京卫星制造厂试验检测中心,北京100194)
1 引言
多设备组网测量技术是新近发展起来的一种综合利用多种测量设备优势组成网络化的测量系统,从而实现大型复杂构件高精高效测量的方法,是现代工业大尺寸测量的重要发展方向。在现代高端制造业中,多设备组网测量技术获得了越来越广泛的应用,它具有量程大、精度高、非接触、机动灵活、动态测量等优点,是单一坐标测量设备技术所无法比拟的,对控制重要产品质量起到了至关重要的作用[1]。
由于生产的发展和科学技术水平的提高,要求提供精度更高、动态性能更佳的测量系统[2]。在航天产品的制造及装配过程中,大型结构/机构的几何尺寸和形位误差的测量,是保证产品质量的关键因素。因此,多设备组网测量作为航天产品研制生产过程中亟待解决的关键技术之一,其目的是根据设计图纸和规范的要求,高精度地对三维部件、工件、结构或整机,进行检查、检核、调整、装配、安装和维护;包括为了获取三维坐标,进行准直、几何形状拟合、质量保证审核、静态/动变形监测等而进行的精密测量。典型应用领域有航空、航天、汽车、造船、石油、天然气、钢铁、大型设备加工和维护,在建筑、天线安装、机器人、钢结构、起重机、发动机等领域也有广泛的需求和应用。为此,国内外都在研究多设备组网测量技术。
当前我国航天器主体结构趋于大型化、复杂化、多样化,航天器大型零部件加工和装配越来越依赖于高精高效的大尺寸便携式测量技术、仪器/系统(包括如电子经纬仪、激光跟踪仪、激光雷达、关节臂、照相测量系统、激光扫描系统、室内GPS等)所提供的性能质量保证[3]。
以往对大型载人航天器的测量主要是使用单台测量仪器,存在测量过程中转站次数多、辅助测量人员多、挡光现象多、测量周期长、部分项目不可测等问题,因此,需要寻找一种测量空间范围大、测量精度更高、转站次数少、测量效率高的测量方法来满足大型载人航天器对精密测量提出的新挑战。多设备组网测量技术可很好解决当前大型载人航天器测量中所遇到的难题。
2 多设备组网测量原理
2.1 测量工艺基本流程
测量任务的主要测量工艺流程见图1。
1)待测对象的分析。待测对象可以是毛坯件、零部件、部装、总装,但是不管处于何种状态,需要分析待测对象的尺寸、结构、材料等一些基本要素[4]。
2)测量方案规划。明确待测对象的测量要求,结合当前测量设备能力和测量技术,选择合适的测量设备进行现场布局,从而形成测量方案。
3)测量过程执行与数据分析。按照测量方案在现场对每个待测特征实施采样,然后进行数据处理,给出数据处理结果并进行反馈。
2.2 基本原理
多设备组网测量的基本原理就是多传感器的数据融合。
由于各传感器空间位置的差异,导致信息描述空间各不相同,各测量传感器的测量数据均在各自定义的坐标系下,如图2所示。
故将各极坐标数据转换成直角坐标数据[5]:
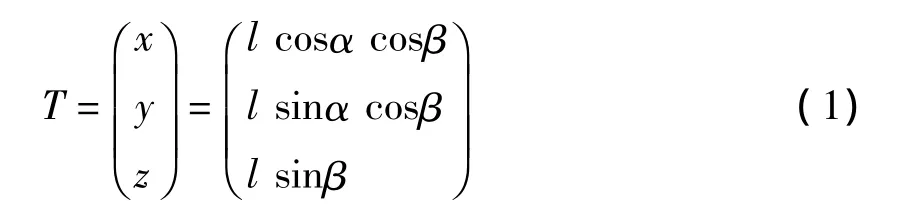
其中,T为点坐标矩阵,l为点距,α为OP在x-o-y面内投影与x轴的夹角,β为OP与x-o-y面的夹角。
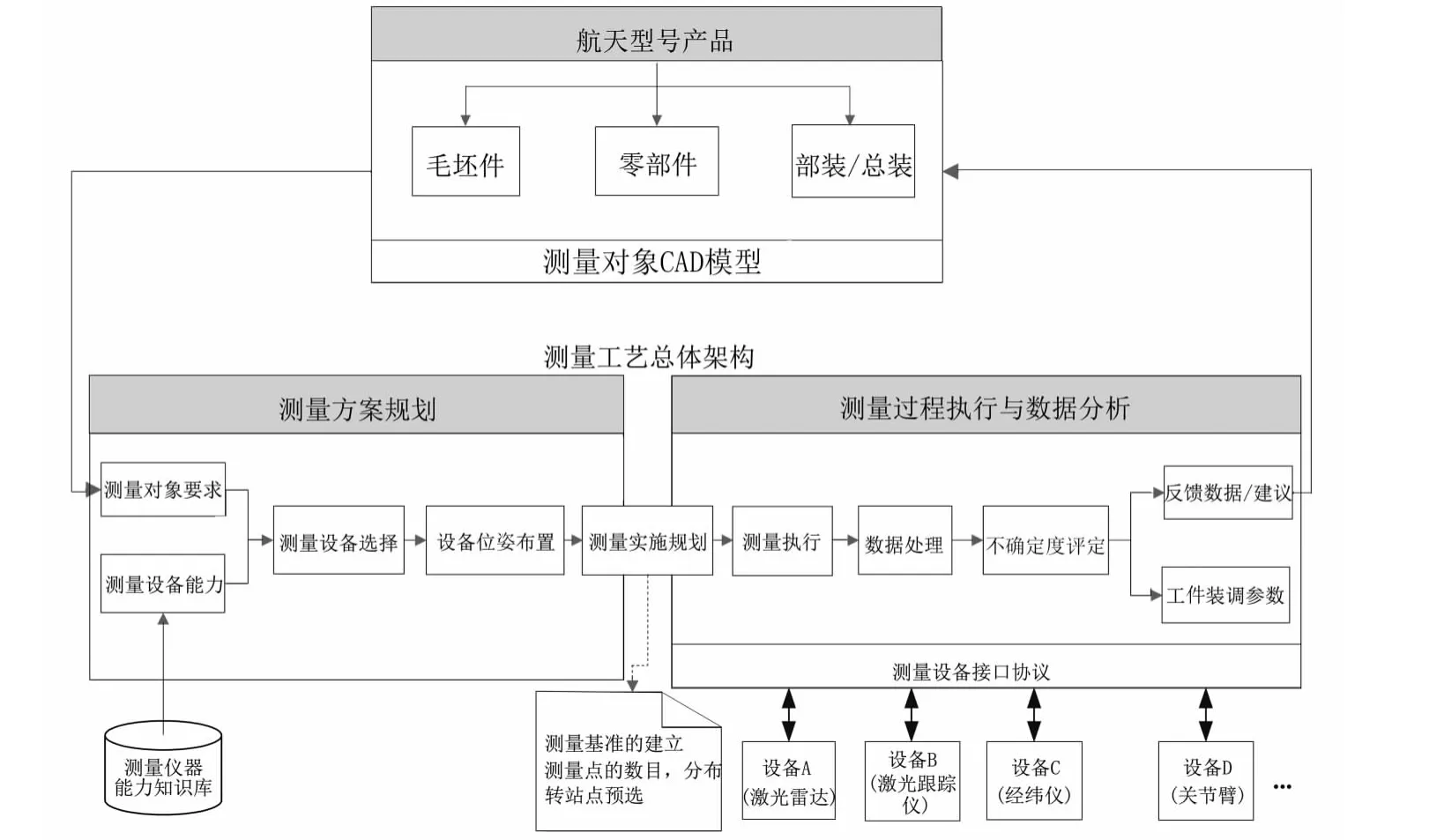
图1 测量工艺基本流程Fig.1 Basic flow chat of measure craftwork
然后将各传感器数据映射到同一参考空间,将测量坐标系统一到测量基准坐标系。一般可以选择工件坐标系或其中某测站的坐标系为测量基准坐标系,将不同坐标系下的数据进行空间转换。如图3所示为一个典型大尺寸多设备测量网络,它包括激光跟踪仪、经纬仪和关节式测量臂3个测量设备[6]。以激光跟踪仪测站为测量基准坐标系,则需要将其他两个测站的测量数据转换到该基准坐标系中。
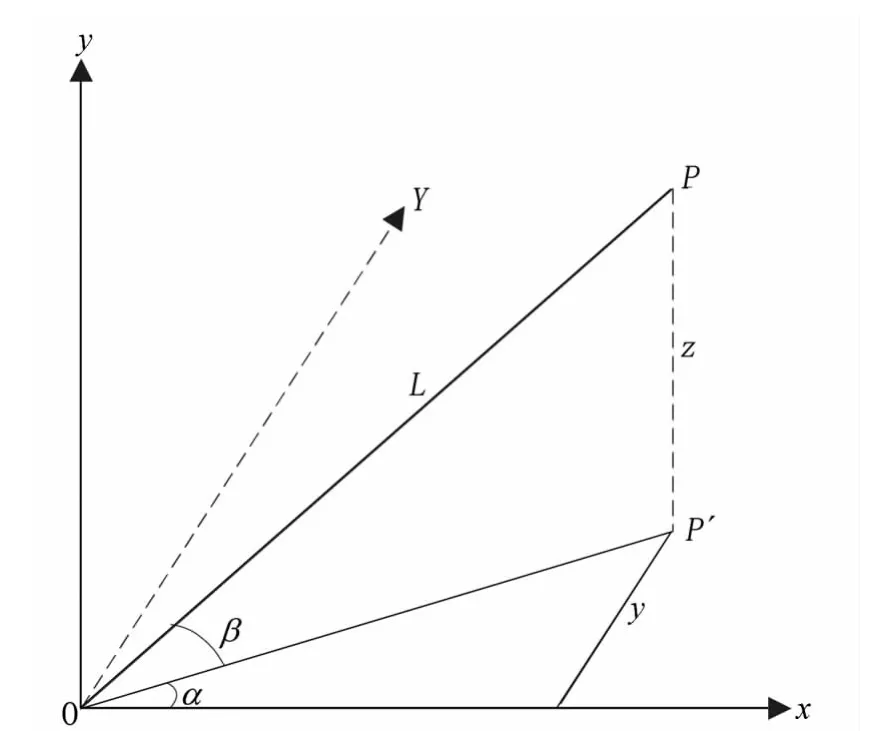
图2 测量点的直角坐标和极坐标关系Fig.2 Connection between Cartesian coordinates and polar coordinates
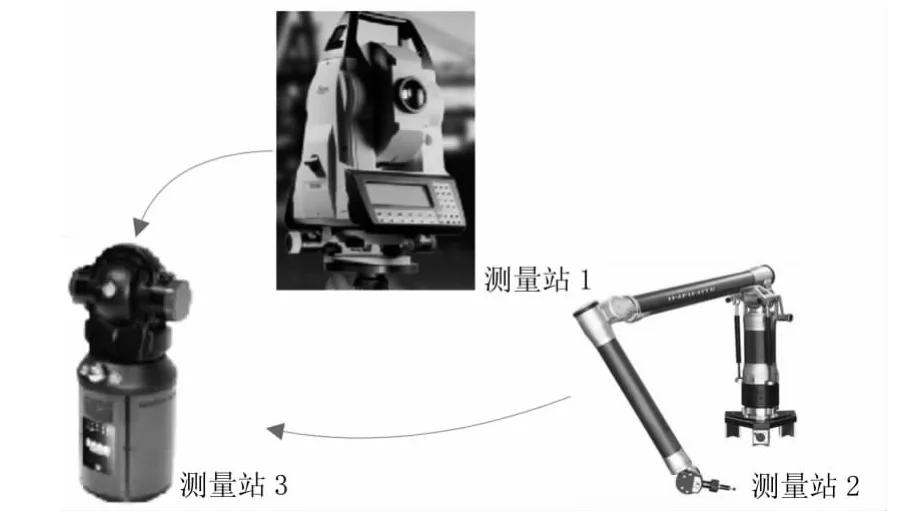
图3 多测站的坐标系转换Fig.3 Coordination transform of multi-measurement sites
通过空间公共点来实现其他测量坐标系旋转和平移到基准坐标系下,其旋转和平移的计算公式如(2)、(3)、(4)所示[3],式中i最小为 3(解方程的必要条件),在实际测量中为保证转换的精度,一般需要保证i为6 ~8[6]。
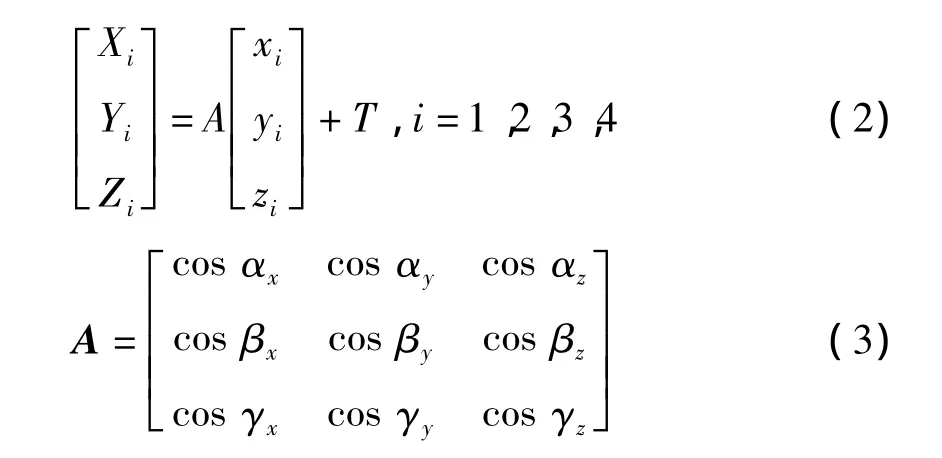

把同一组点在各自设备或工件坐标系下点坐标(xi,yi,zi)T,(Xi,Yi,Zi)T代入公式(2)中就可以求出A和T。其中,A为旋转矩阵,T为平移矢量。
3 多设备组网测量方法
3.1 组网技术
以往对大型结构件(如大型舱体)的测量主要是使用单台激光跟踪仪,测量过程中转站次数多,辅助测量人员多,挡光现象多,测量周期长,存在不可测项目。激光雷达和激光跟踪仪组网测量能够一举解决上述多个测量难题。进行组网后新的测量系统其优势在于:测量空间范围大、测量精度更高、转站次数少和测量效率高,很好的满足了当前大型结构件(如大型舱体)对几何测量提出的新要求。对大型结构件(如大型舱体)进行几何量测量的传统方法和组网测量方法优劣势分析如表1所示。
在大型结构件(例如大型舱体)装配精度测量中所使用的仪器主要有激光跟踪仪和激光雷达。为了实现多设备组网测量,需要通过对相应的测量软硬件进行应用方法研究以达到对激光雷达、激光跟踪仪的数据采集和自动控制的基本要求。应用研究具体包括相应的硬件接口、通讯电缆、控制软件、数据库的统一及共享,设备组网成功后对组网测量系统的精度进行联合标定以满足测量精度的要求。联合标定主要利用辅助标定工装和校准杆按照特定的标定方法实现。选择激光跟踪仪和激光雷达组成测量网络系统,两种测量设备的参数见表2,所用软件 SA(Spatial Analyzer)为专业测量软件。
3.2 组网配置
多测量设备组网时需要将各测量设备所获取到的数据进行共同处理,故首先需要实现整个测量网络的数据通讯和共享,这样才有利于各测量设备采集到的数据被充分利用。根据组网需要,设计了一个测量网络系统,其数据通讯主要靠数据交换机来实现,示意图如图4所示。
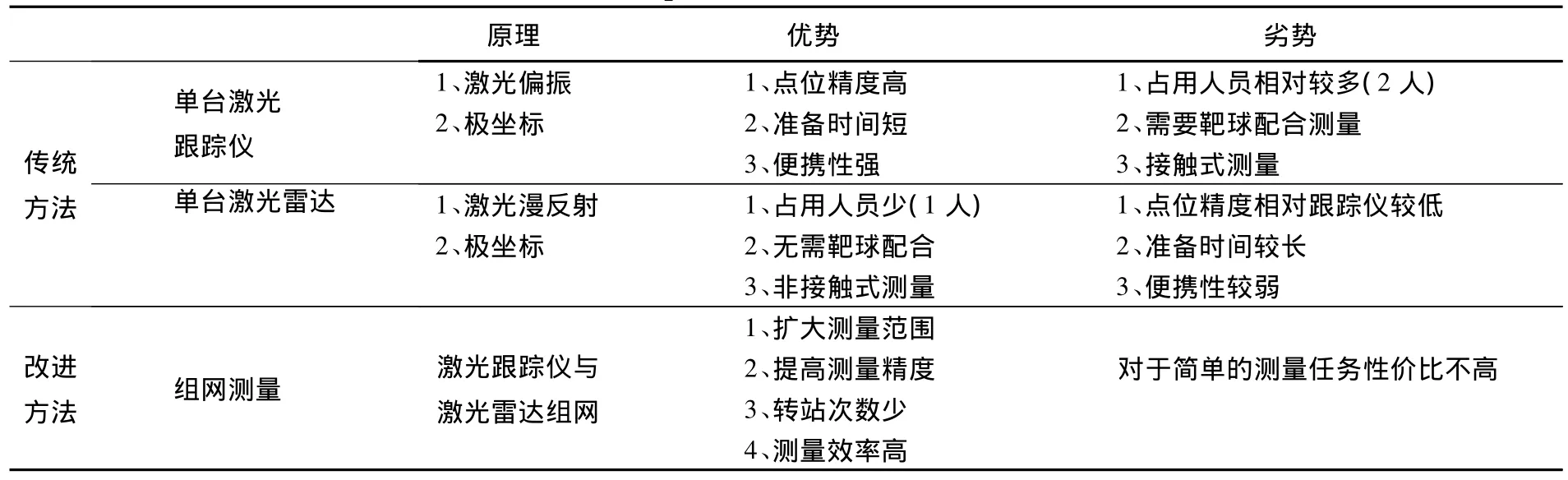
表1 测量方法分析对比Table 1 Comparison of measurement methods

表2 测量设备参数Table 2 The parameter of measurement equipment
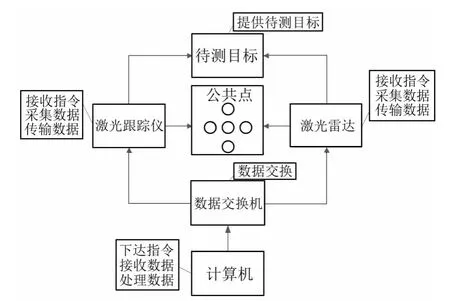
图4 激光跟踪仪和激光雷达组网配置示意图Fig.4 Picture of Laser tracker and Lidar combinated configuration
测量网络系统主要由计算机、数据交换机、激光跟踪仪、激光雷达和大型舱体组成。其主要功能分别为:
1)计算机:下达指令,操作者对于测量软件的操作;接收数据,接收测量设备反馈回来的测量数据;处理数据,获取直接数据之后进行数据处理和分析。
2)数据交换机:数据交换,主要是对计算机和测量设备之间的信息进行互通。
3)激光跟踪仪:接收指令,接收计算机所发出的指令;采集数据,采用接触式采集待测目标的数据;传输数据,将测量获取到的点坐标反馈到测量软件。
4)激光雷达:接收指令,接收计算机所发出的指令;采集数据,采用非接触式采集待测目标的数据;传输数据,将测量获取到的点坐标反馈到测量软件。
5)待测大型舱体:提供待测目标。
由于数据交换机可以有多个接口,故此系统具有可扩展性,即可以连接除上述两台测量设备之外的其他设备。因为原来两台测量设备都是由测量软件SA控制,故两者的数据格式可以完全保持一致,无须进行数据格式转换。因此两台测量设备所采集到的数据均能通过数据交换机到达计算机,数据格式也一致,数据存在互通性,能够实现软硬件接口和数据共享。组网测量示意图如图5所示,大型载人航天器测量过程中所用到的测量附件和辅助工装如图6所示。
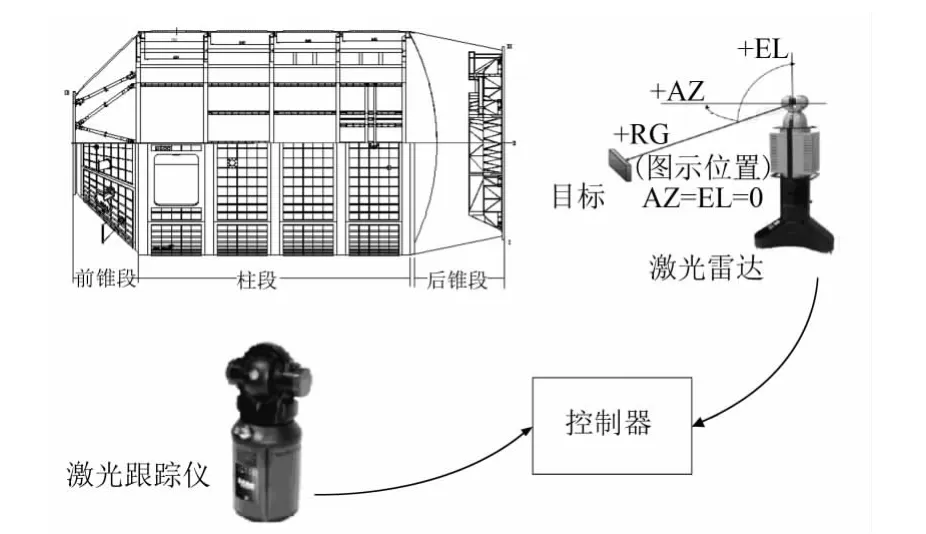
图5 激光雷达和激光跟踪仪组网测量示意图Fig.5 Picture of Laser tracker and Lidar combination measurement

图6 大型舱体组网测量附件和工装Fig.6 Accessories and tools of combinated measurement on large cabin
3.3 数据解算
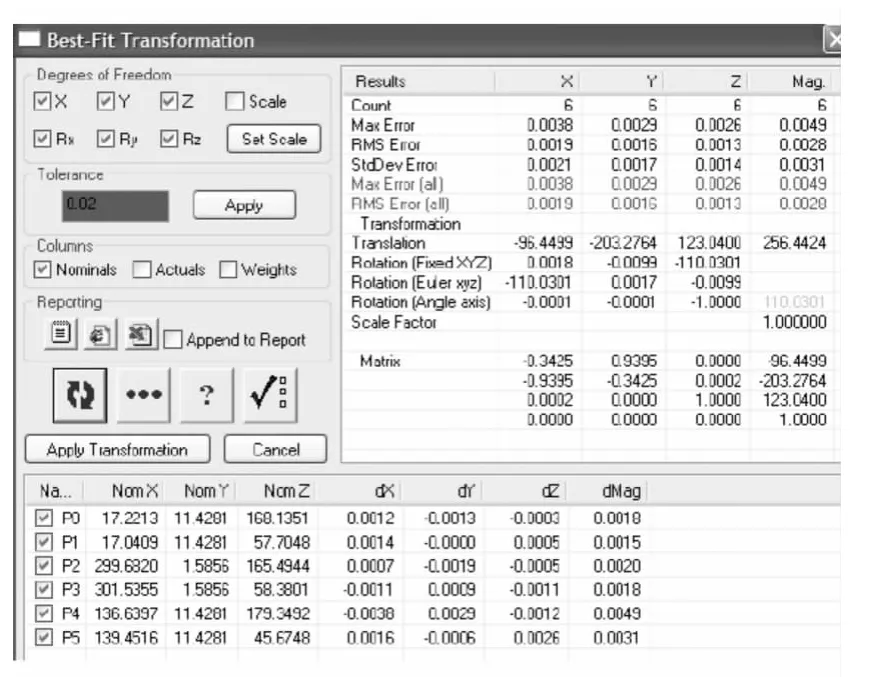
图7 坐标系转换数据处理界面Fig.7 Interface of dealing with coordination-data
利用固定点进行坐标系转换时存在着一定的转换误差,图7为坐标系转换数据处理界面,在转换过程中需要分析各点分量的偏差是否存在粗大误差,若存在偏差较大的分量,说明该点的位置数据被破坏,因此可认为该点为粗大误差点,可以作为坏点进行剔除,通过分析和剔除最终保证坐标系转换误差控制在允许范围内。
组网测量技术在大型载人舱体测量过程中,解决了转站多、挡光现象多、测量周期长、存在不可测项目等四大难题,得到了很好的应用。
4 结论
根据多设备组网测量自身技术特点来看,后续该技术的主要发展趋势为:
1)测量平台软件统一。使用统一的数据传输、处理的测量平台软件,从软硬件上使得多设备组网更加便利,改善自身的测量环境和能力。测量平台的数字化处理如图8所示。
2)硬件改善。通过对测量设备硬件的性能进行改善或者根据需求进行全新的结构功能设计,包括对测量机机体,测头,传感器等各种相关设备的改善[7]。
3)测量设备配置。对于单台测量设备无法完成的测量任务,用多台同类型或者不同类型的设备组合测量,这其中涉及到测量设备空间位置的配置等一系列问题。
4)数据处理。在获取数据之后,如果采用好的计算方法来进行数据处理,以获得更好的数据结果。这里注重处理算法的研究,例如,人工神经网络、遗传算法、模糊理论,蒙特卡罗仿真、进化算法、最小二乘法、高斯滤波快速算法等各种算法的研究和运用。
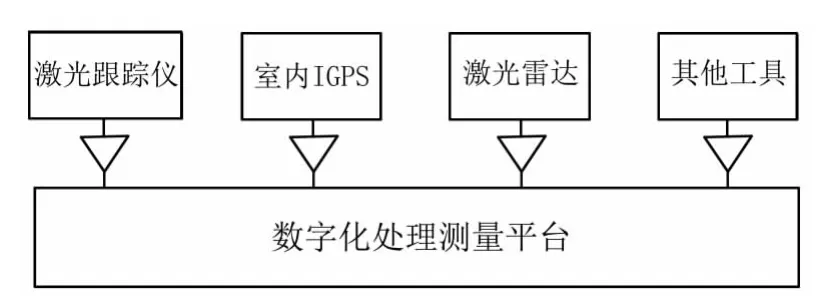
图8 数字化处理平台示意图Fig.8 Picture of digital processing platform
5)测量通信接口标准。由于测量过程中的不同部分采用不同的语言通信接口标准,所以对测量数据通信造成一定的困难。现今比较主流接口形式为:DMIS,ISO STEP,DML,I++DME,后续需要对各种通信接口标准进行统一规范度的制定和落实。
[1] 张福民,曲兴华.大尺寸测量中多传感器的融合[J].光学精密工程,2008,25(4):26-27.
[2] 刘鹏鑫,王扬.反求工程中多传感组合测量系统研究现状与发展[J].机械科学与技术,2008,32(2):19-23.
[3] 苻天舒.关于组合测量列方差公式的证明[J].物理实验,2009,28(1):87-91.
[4] 石彦召,朱新华.基于光电经纬仪的布站研究[J].探测与控制学报,2010,35(10):45-47.
[5] 于成浩,柯明.基于激光跟踪仪的三维控制网测量精度分析[J].测绘科学,2009,29(6):89-92.
[6] 航志民,唐文彦,刘建新,等.基于激光跟踪仪和坐标测量臂的工业测量系统[J].测量与设备,2008,61(2):14-18.
[7] 贾东永,陈联,陈光奇,等.空间站密封舱双道静密封结构泄露检测[J].载人航天,2012,18(6):31-32.
