人体胃肠道生理参数无创检测系统及试验研究
2013-09-19颜国正王志武姜萍萍
赵 凯,颜国正,王志武,姜萍萍,刘 华
(上海交通大学电子信息与电气工程学院,上海200240)
1 引言
随载人航天任务的发展,航天员的在轨时间越来越长,为航天员提供高质量的医监医保,也将面对更多的航天医学问题。航天员胃肠道正常的消化、吸收及调节功能是维持生命、抗御疾病、提供最佳工作效率的前提。当前所掌握的人体胃肠道消化、吸收及调节功能,是在特定的地球表面引力场、地理、地质、气象、水文、生态以及诸多地表因素综合影响下获得和发展起来的。空间环境下胃肠功能的研究目前较为初步。
研究表明:失重条件下,进食后的胃排空不同于地面情况,胃排空时间、肠内转运时间等生理因素将发生改变。应激条件下,航天员胃运动幅度显著提高,频率加快。胃电是航天运动病恶心症状将要发生的早发性敏感指标,而胃电活动所致的胃平滑肌机械运动必然反映在胃内压力、胃蠕动波节律变化等方面。
研究太空环境下胃肠功能及空间环境人体胃肠功能的影响,首先必须解决该环境下胃肠道运动生理参数的无创、长时间检测问题。对此,美国率先开展了相关研究,典型的工作有:美国国家航空航天局Goddard太空飞行中心、美国约翰霍普金斯大学、美国国家航空航天局的喷气推进实验室(JPL)、美国国家航空航天局(NASA)AMES研究中心研制的“吞服式胃肠道内温度监测系统(ITMS)”、“吞服式胃肠道内温度、pH值检测系统”和“可吞服响应式药物释放系统”,相关研究结果促进和推动了美国载人航天事业的发展。
在国内,一些从事航天医学研究的单位在航天器内环境和设备的评价方面开展了大量工作,并制订了飞船乘员舱气体环境医学要求、舱室温度环境和个人防护装备的医学要求等多项国家军用标准。但在空间环境下,对人体生理状态及生理功能的系统性研究尚待加强。因此,研究上述问题,对于实施高质量的医监医保、全面掌握航天员的整体健康状况具有十分重要的意义。
2 人体胃肠道生理参数无创检测系统组成与工作原理
人体胃肠道生理参数无创检测系统由微型电子胶囊、便携式数据记录仪和数据处理系统三个部分组成。系统整体结构如图1所示。
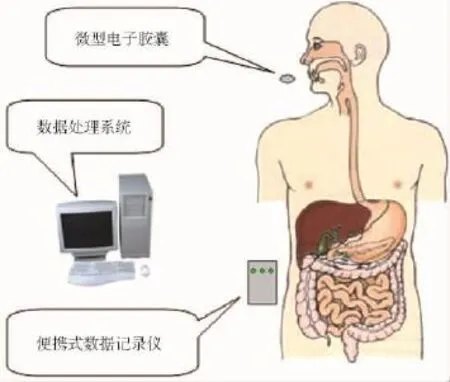
图1 系统整体结构
检测过程中,微型电子胶囊从口腔服入、经肛门排出,整个检测过程无痛苦、无创伤、无需清肠及禁食。微型电子胶囊能在人体胃肠道正常生理状态的情况下,24h监测胃肠道内压力、温度、pH值等生理参数。便携式数据记录仪对微型电子胶囊发射的数据实现可靠接收和存储。数据处理系统可对便携式数据记录仪存储的数据进行一系列处理,以便获得人体胃肠道内的温度、压力和pH值等生理参数,为进一步的诊断提供依据。
2.1 微型电子胶囊
微型电子胶囊由微传感模块(包括微型压力传感器模块、微型温度传感器模块和微型pH值传感器模块)、射频发射器模块、数据处理模块、电源管理模块、电池组模块等部分组成,所有电路密封在外壳内,如图2所示。
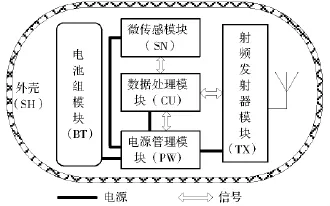
图2 微型电子胶囊内部结构
微传感模块由传感器和相应的信号调理电路组成,将信号调理电流与传感器设计在一个模块内的原因是为了增加各模块的独立性,提高设计的灵活性。微型数据无线发射模块研制过程中,首先必须确定载波频率,频率点的选择应使射频通讯模块的辐射效率较高、电流消耗较小,考虑到无线通讯频率的使用许可,该模块采用ISM(Industrial Scientific Medical)波段内的433.92MHz作为射频通讯的载波频率。电源模块由纽扣电池组和电源管理模块组成,由于小体积电池能量非常有限,为此,利用系统工作的时空不均衡性,即在实际应用中对有效功耗和无效功耗进行时间域和空间域的划分的方法来设计和运用电源管理模块。研制的微型电子胶囊的外形尺寸为φ11×26mm,质量4.5g。其外形如图3所示,主要性能指标如下:温度测量范围为34℃~42℃,测量误差为±0.25℃,分辨率为0.01℃;压力测量范围为70kPa~150kPa,测量误差为±1.5kPa,分辨率为0.1kPa;pH 值测量范围为 1~11,测量误差为±0.5,分辨率为0.1。

图3 微型电子胶囊外观
2.2 便携式数据记录仪
便携式数据记录仪用于接收微型电子胶囊发送的数据,并进行存储。其硬件包括射频接收器模块、实时时钟模块、数据存储模块、数据处理模块、电源管理模块、人机接口模块和电池组,如图4所示。
2.3 数据处理系统
数据处理软件的功能包括:数据输入接口、数据存储与查询、数据分析与处理、结果显示与输出、图形用户界面。通过数据处理系统对检测数据的分析,便可以获得人体胃肠道各段的收缩压、静息压、静息期总时间、每分钟收缩频率,胃肠道各段的温度值,pH值等表征胃肠功能的生理参数。
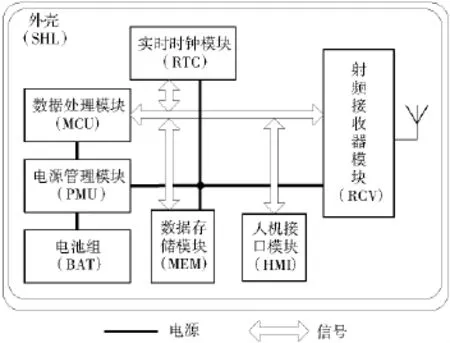
图4 便携式数据记录仪原理框图
3 人体胃肠道生理参数无创检测系统环境试验
为保证人体胃肠道生理参数无创检测系统在太空环境中性能可靠,按照《交会对接任务医监及医学实验设备分系统初样环境试验大纲》中的要求,对系统进行了一系列环境试验。主要试验内容见表1。
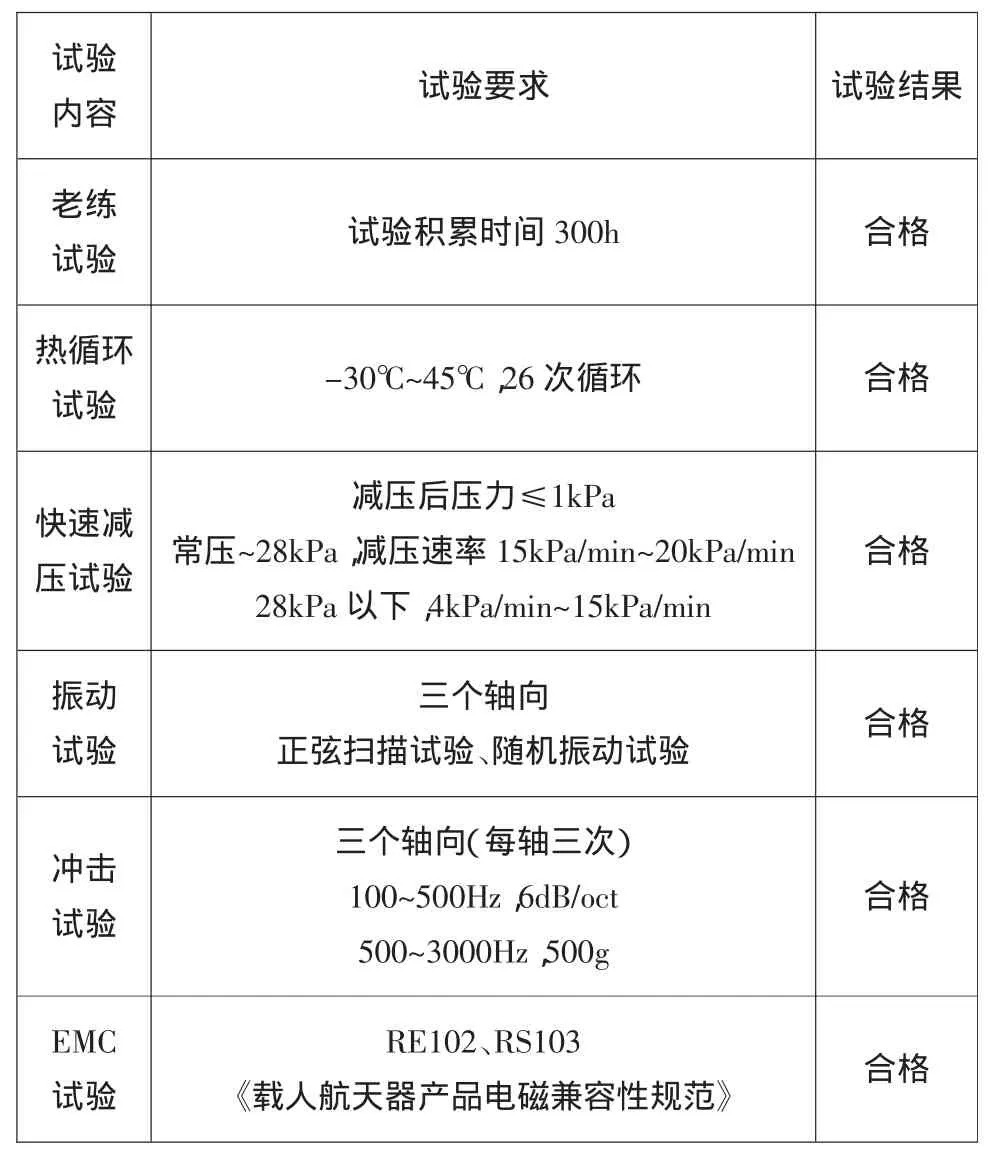
表1 人体胃肠道生理参数无创检测系统环境试验
环境试验由中国航天电子技术研究院五三九厂、中国航空工业华东电磁兼容监督检测中心、中国电子科技集团第三十二所质量部检测中心等单位完成。
4 人体胃肠道生理参数无创检测系统的临床实验
“人体胃肠道生理参数无创检测系统”在上海市新华医院、仁济医院和浦东新区人民医院进行了一系列临床验证试验。图5为一受试者全消化道生理参数检测数据曲线。
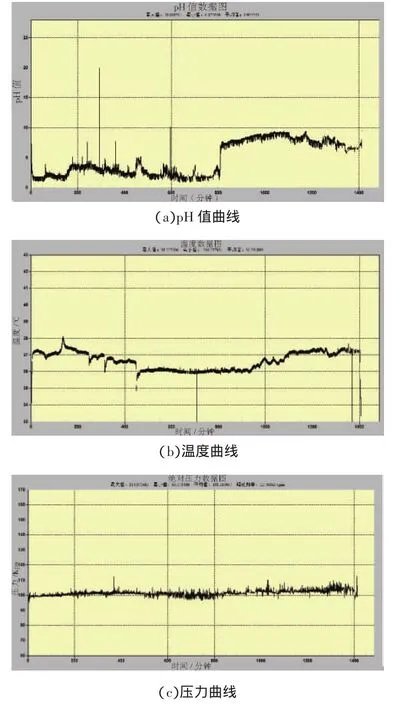
图5 受试者全消化道生理参数检测结果
4.1 生理参数检测数据野值的剔除
在消化道生理参数采集过程中,由于干扰的存在,将产生不代表信号信息的数据,即野值,主要表现为:(1)接受到的数据格式错误。(2)数据不连续或负荷毛刺,这类野值可能是由于消化道局部紧张性排异性收缩引起,它们的存在会使功率谱产生偏离,或产生虚假的频率成分,因此,处理过程应对其予以剔除。
本文野值的剔除方法采用探测插值法(probing interpolation method),其基本原理如图6所示,图中()2是先将数据平滑再平方,()是先将数据平方再平滑,其目的是产生一个不断更新的样本方差,然后探测下一个数据点xi+1,如果下一个数据点满足,(K 为比例系数)关系式,则该数据认为不是野点;如果不满足则采用线性外插法剔除该伪点;伪点代替公式为=xi+(xi-xi-1)。
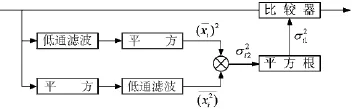
图6 野值剔除原理图
4.2 数据的平滑
实际采集到的人体消化道生理信号,必然会掺杂着噪声信号-误差,如系统误差和随机误差。考虑到消化道收缩,如时相性节律性收缩、巨大移行性收缩等,收缩幅度较大,噪声对采集到的生理信号影响较小,可以不对其进行平滑处理。而当胃肠道处于相对静止期,如移动运动复合波(migrating motor complex,MMC)的I相,噪声影响较大,必须予以处理,即需要在局部范围内消除误差。这里采用五点加权平均平滑法(即53H法)。
53H法是由Tukey提出,其基本思想是产生一个曲线的平滑估计,然后把它从数据中减掉。该方案利用“中位数”是均值的鲁棒(robust)估计这个事实,假定测得数据为{x(i)},i=1,2,…,n,53H 法信号处理步骤为:
① 从{x(i)}构造一个新序列{y(i)},其方法是取x(1),x(2),…,x(5)的中位数作为y(3),然后舍去x(1)加入x(6)取中位数得y(4),依次类推,直到加入最后一个数据。换言之,总是在相邻5个数据中择取中位数,显然,{y(i)}的项数比原{x(i)}项数少 4项。处理方法可为:

②用类似的方法在{y(i)}的相邻的3个数据中择取中位数构成序列{z(i)}。
③最后由序列{z(i)}按如下方式构成序列u(i):

为验证信号平滑处理后的效果,截取部分原始数据经行数据平滑处理,如图7所示。和原数据信号相比,平滑后的数据信号去除了原数据中的干扰信号,使得数据信号更清晰。

图7 原数据信号与平滑后数据信号对比
对检测数据通过野值的剔除和平滑后,采用数据处理方法对检测数据进行分析和处理,得到了如下初步结果:提出了基于概率神经网络的遗传算法搜索最优特征子集的方法,获得了表征结肠活动的最优特征组合;提出了基于小波和小波包变换的对角切片谱平方相位耦合方法,得到了胃活动平方相位耦合关系;基于自相关分析、重标极差分析、功率谱分析和消除趋势波动分析方法,获得了正常结肠压力活动呈现复杂的幂律长程相关特性的结论。
④基于非线性混沌理论和分形分析方法研究了结肠活动,揭示正常结肠活动的混沌特征和分形维数。上述研究结果将为胃肠道生理过程研究提供参考。
5 结论
“胃肠道生理参数无创检测系统”体现了正常生理状态下对人体胃肠道生理参数的无创、实时和连续检测的设计思想和要求,通过对不同环境下人体胃肠道生理参数的检测可开展人体胃肠道功能建模研究、胃肠道功能评价及胃肠道疾病的预警。进一步对空间环境下人体胃肠道生理参数的检测,可进行空间环境对人体胃肠功能的影响研究,为空间环境下航天员健康评价和高质量的医监和监保提供全新的方法和手段。◇
[1]严荣国.人体消化道生理信号无创检测技术及其非线性动力学分析.上海交通大学博士学位论文,2006(4).
[2]Mc Caffrey C.,Chevalerias O.,O’Mathuna C.,et al.,Swallowablecapsule technology.Ieee Pervasive Computing,2008.7(1):23-29.
[3] Li,H.Yan,G.,A portable method for assessing gastrointestinal motility by simultaneously measuring transit time and contraction frequency,JOURNAL OF MEDICAL ENGINEERING AND TECHNOLOGY,2008,VOL 32;NUMBER 6,pages 448-455.
[4]LI Hong-wei YAN Guo-zheng JIANG Ping-ping,Accuracy and Electromagnetic Safety Evaluation of a Portable Electromagnetic Localization System for Micro Invasive Medical Devices in Vivo,JOURNAL OF DONGHUA UNIVERSITY,2009,26(2).
[5]Van Gossum,A.and Ibrahim,M.,Video capsule endoscopy:what is the future Gastroenterol.Clin.North Am.2010,39 807-26.
[6]Carpi,F.,Magnetic capsule endoscopy:The future is around the corner.Expert Rev.Med.Devices,2010,vol.7,pp.161-164.
[7]刘洪英,李晓华,皮喜田等.消化道生理参数检测胶囊系统的研究进展[J].2011,30(12),1-7.
[8] Jia Zhiwei,Yan GZ.Efficiency optimization of wireless power transmission systems for active capsule endoscopes.Physiological Measurement,32,2011,1561-1573.
[9] The SmartPill Wireless Motility Capsule.[EB/OL].2011.http://www.smartpillcorp.com.
[10]Liu Horrgying,Wang Gang,Wei Kang,et a1.An intelligent electronic capsule system for automated detection of gastrointestinal bleeding [J].Journal of Zhejiang University:Science B,2010,11(12):937-943.
[11]YAN RG,YAN GZ,ZHANG WQ,et al.Detecting phase coupling of gastric interdigestive pressure activity via diagonal slice spectra[C]//IEEE-EMBS.Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference.Shanghai,2005.