柔性机构耦合振动的谐振可靠性分析方法
2013-09-18于霖冲
于霖冲
(厦门理工学院机械与汽车工程学院,厦门 361024)
在高速和大柔性情况下,如果柔性构件的耦合振动频率与构件的固有频率接近,则会产生谐振,从而导致构件的变形和动态应力急剧增大,使柔性机构运动功能受到很大的影响,严重时会导致构件发生塑性变形甚至强度破坏,造成机构功能的失效。因此,对柔性机构耦合振动的谐振可靠性分析具有十分重要的理论意义,对柔性机构的驱动规划有重要的实际参考价值。
多柔体系统动力学经过30多年的发展,在建模理论和求解方法上已经逐渐成熟[1],并在耦合振动方面取得了突破,为本研究奠定了基础。Diken[2]对柔性机械臂的振动频率响应的影响因素进行了分析;Siddiqui等[3]通过摄动方法对有移动物体的柔性悬臂梁的耦合问题进行了探讨;Al-Bedoor等[4]和 Yau 等[5]分别应用拉格朗日乘子法和Hamilton原理建立了有移动物体的旋转柔性悬臂梁模型,并进行了运动学分析;徐可君等[6]建立了构件振动可靠性和强度可靠性计算的模糊模型,计算了涡轮叶片的可靠度;崔海涛等[7]探讨了柔性梁的共振和疲劳可靠性问题。本文在上述学者的研究基础上,通过多柔体系统动力学分析,提出了柔性机构耦合振动的谐振可靠性分析理论和方法,建立了柔性机构谐振可靠性分析模型。通过蒙特卡罗随机模拟,计算构件的固有频率,通过柔性机构的虚拟样机仿真实验,确定机构运动规律和耦合振动频率分布特性,进而求出谐振可靠度,为柔性机构的设计和分析提供了借鉴。
1 柔性机构谐振可靠性分析理论和方法
1.1 柔性机构谐振可靠性基本理论
构件几何、物理等参数的随机性使构件固有频率成为随机变量,而动力、载荷等随机因素使柔性构件的耦合振动频率成为随机变量。在固有频率和耦合振动频率相等或者接近时,振幅、动态应力急剧增加导致构件发生强度破坏或者运动功能失效。因此,在设计机构运动形式和驱动规划时,要避免构件频率相等或者相接近。在运动过程中,机构的拓扑结构是时变的,驱动力(矩)和载荷也是时变的,所以柔性构件的耦合振动频率成为时变随机变量。
假设随机变量ωi(i=1,2,…,n)为柔性构件的第i阶固有频率,时变随机变量p(t)为柔性构件t时刻的耦合振动频率。当在机构运动时域T内t时刻的耦合振动频率p(t)与构件固有频率ωi的接近程度超过阈值vth时,柔性构件将产生谐振。此时构件的耦合振动幅度将急剧加大,导致机构系统运动参数迅速恶化,机构的这种失效模式就是耦合振动失效。阈值vth的大小根据柔性构件第i阶模态的振型确定。经过柔性构件的模态分析确定柔性构件的各阶振型和阈值vth,从而建立柔性构件谐振极限状态方程:

柔性机构的谐振可靠性可以描述为:在机构运动时域T内,柔性构件在任意时刻的耦合振动频率相对于各阶固有频率的接近程度不超过阀值的概率。式(2)就是柔性机构谐振可靠性分析的广义模型。

1.2 柔性机构谐振可靠性分析方法
利用Lagrange方法建立柔性机构的动力学方程[1,8-9]:

如果柔性构件在机构运动t时刻的固有频率和耦合振动频率服从正态分布,则根据干涉理论有:

其中σv和σω分别为固有频率和耦合振动频率的标准差。
在系统中只要有一个构件在任意时刻出现耦合频率与固有频率产生谐振,就会发生谐振失效。因此,整个机构系统的谐振可靠性分析应按照串联系统计算其可靠度。
2 柔性机构谐振可靠性分析和计算
2.1 柔性机构模型的谐振可靠性分析
柔性机构模型为空间站柔性展开机构[10]。图1所示为机构展开状态,展开机构由B0~B15共16个构件组成,其中大尺寸的轻质构件 B1、B2、B4、B5、B13、B14和 B15在展开过程中会产生较大的变形,将它们作为等截面均质柔性梁。机构初始状态为收拢状态,各个构件无弹性变形。柔性展开机构的设计运动规律为:在机构启动初始10 s内 ,由电机B8和B11匀加速驱动;在10 s以后,电机驱动力为0,机构依靠惯性完成展开运动。在机构展开过程中,构件的动态响应为高度非线性,这种特性体现为构件的运动学参数、动力学的动态参数随时间的变化呈现出“振动”的现象,这种现象就是耦合振动的反映。
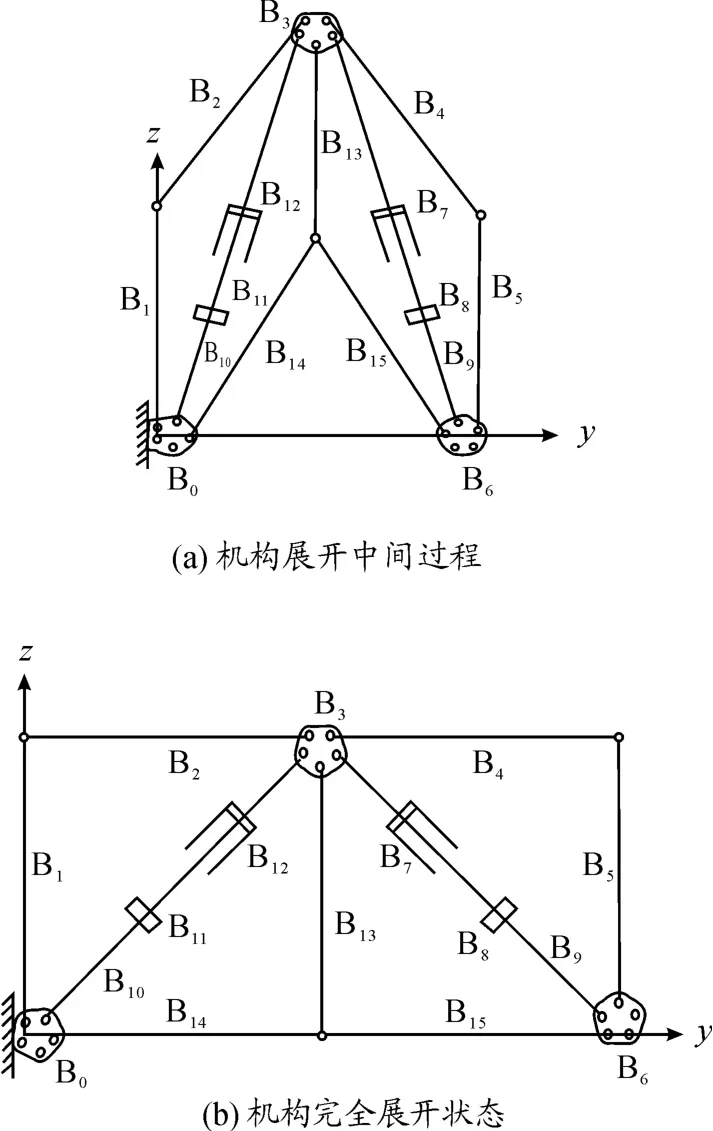
图1 空间站展开机构模型
选择机构中有代表性的构件B2和B5作为研究对象。其中,构件B2做平面旋转运动,构件B5做平移运动。
柔性构件为细长杆,两端为铰链连接,柔性构件质心处的耦合振动最剧烈。通过柔性机构的虚拟样机仿真,得到构件B2和构件B5质心处的耦合振动,如图2所示。
从柔性机构仿真数据可以看出:构件B5的耦合振动比构件B2的振动频率高、振幅大。在启动阶段由于机构初始状态是静止状态,因此惯性力较大,柔性机构产生频率较低。
振幅较大的耦合振动在10 s时,加速度和速度达到最大,耦合振动在10 s时最剧烈。10 s以后,驱动力为0,柔性机构依靠惯性运动,由于运动副的摩擦,使机构的速度逐渐降低,耦合振动的振幅和频率逐渐随之下降。因此,在柔性机构驱动规划中,需要对10 s前后的耦合振动进行谐振可靠性分析。
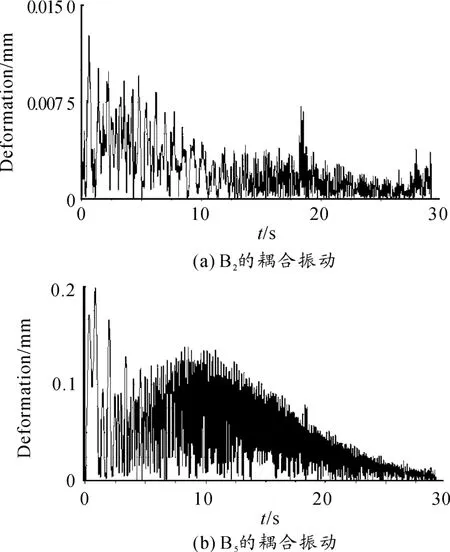
图2 柔性机构的耦合振动
2.2 柔性机构谐振可靠性分析
由于机构工作在微重力环境下,受到运动副之间的摩擦和碰撞以及其他随机因素的影响,故柔性机构的动态响应具有随机性。通过柔性机构运动仿真,将对动态应力响应影响较大的因素确定为柔性机构系统的随机变量:驱动加速度ad(rad/s2)、摩擦力矩Mf(N·m)、驱动时间t(s)、阻尼系数f以及柔性构件的质量m(kg)。假设各个随机变量的分布服从正态分布,随机变量的均值为设计值,方差的大小分别根据电机技术指标、材料参数等确定。
表1为随机变量设计值和方差、100组抽样数据的均值和方差,其中:vi、μd、σd、μp、σp分别表示随机变量的名称、随机变量的设计值、随机变量的方差、按照MC法抽样数据的均值和抽样数据的方差。
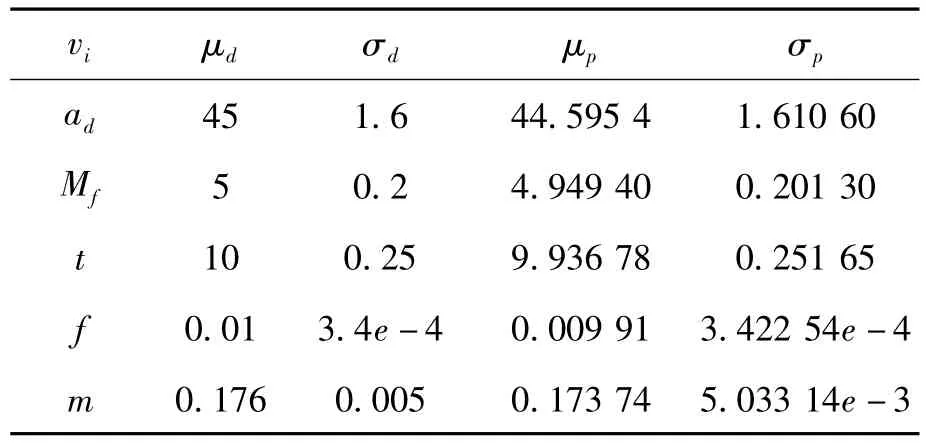
表1 随机变量抽样数据的均值及方差
通过有限元方法对构件B2和B5进行蒙特卡洛仿真,前4阶固有频率均值分别为1.80695×10-4、3.01652 ×10-4、3.45319 × 10-4、3.84593 ×10-4。通过柔性机构运动仿真得到构件B5的振动频率均值为9.85 ×10-1,方差为5.78 ×10-3。根据可靠度计算的干涉方法,得到可靠度为

由于柔性构件的耦合振动频率的均值大固有频率均值约2个数量级,因此空间站展开机构的耦合振动是可靠的。
3 结束语
随着构件柔性的增加,固有频率会降低;同时随着速度的提高,构件的耦合振动频率会上升。因此,柔性机构在高速运动时的耦合振动不可忽视。
本文方法适合于柔性机构耦合振动的谐振可靠性分析,但蒙特卡洛方法仿真时间成本较高,故可结合快速算法进行改进。
[1]Shabana A A.Flexible Multibody Dynamics:Review of Past and Recent Developments[J].Multibody System Dynamics,1997(1):189 -222.
[2]Diken H.Frequency Response Characteristics of A Single-Link Flexible Joint Manipulator And Possible Trajectory Tracking[J].Journal of Sound and Vibration,2000,233(2):179-194.
[3]Siddiqui S A Q,Golnaraghi M F,Heppler G R.Dynamics of A Flexible Beam Carrying A Moving Mass Using Perturbation,Numerical And Time-Frequency Analysis Techniques[J].Journal of Sound and Vibration,2000,229(5):1023-1055.
[4]Al-Bedoor B O,Hamdan M N.Geometrically Non-Linear Dynamic Model of A Rotating Flexible Arm[J].Journal of Sound and Viberation,2001,240(1):59 -72.
[5]Yau D T W,Fung E H K.Dynamic Response of A Rotating Flexible Arm Carrying A Moving Mass[J].Journal of Sound and Viberation,2002,257(1):107 -117.
[6]徐可君,江龙平,隋育松.应用模糊方法计算构件振动可靠性[J].机械强度.2003,25(5):523 -527.
[7]崔海涛,彭兆行.振动构件的强度可靠性分析[J].机械强度,1998,20(4):312 -315.
[8]于霖冲,白广忱,焦俊婷,等.柔性机构变形动态响应可靠性分析方法[J].宇航学报,2006,27(5):1039-1043.
[9]欧进萍,王光远.结构随机振动[M].北京:高等教育出版社,1998.
[10]于霖冲.柔性机构动态可靠性分析[M].北京:机械工业出版社,2012.
