全自主移动车辆控制系统研究
2013-09-17千应庆王晓锋李铁聂文琪
千应庆,王晓锋,李铁,聂文琪
(1.南京理工大学,江苏南京210094;2.上海电控研究所,上海200092)
全自主移动车辆面向各种工况,任务多样,所采用的控制方法也不同。文中针对高速公路,采用了六轮独立驱动移动平台。全自主移动车辆需要的传感系统种类众多,包括激光雷达、GPS接收器、主动摄像头、垂直陀螺仪等。上位机通过这些传感系统对外界信息进行采集,并对这些信息进行高速处理,然后把需要的任务命令下达给下位机PowerPC控制器,从而实现车辆的无人驾驶、自主导航。最后,实验完成了车辆前进、后退、转弯等动作,文中的研究工作对全自主移动车辆控制系统有一定的借鉴意义。VxWorks软件平台。

图1 全自主移动车辆示意图

图2 控制卡实物图
图3为车辆下位机控制系统现场总线CAN网络拓扑结构示意图。
1 控制系统结构
文中介绍的车辆控制系统,主要包括两大部分:一是实时操作系统 VxWorks,二是现场总线 CAN网络。
图1为全自主移动车辆示意图,车辆采用六轮独立驱动[1]。
图2为车辆控制卡实物图,搭载PowerPC硬件和
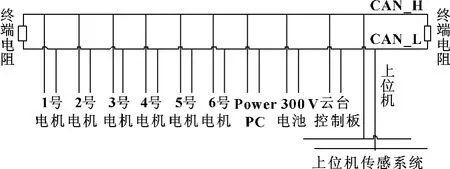
图3 全自主移动车辆CAN网络拓扑图
2 实时操作系统VxWorks的开发
VxWorks是美国Wind River公司专门为嵌入式微处理器设计的一种高模块化、高性能的实时多任务操作系统,具有很高的安全性、可靠性和系统灵活性,它以良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。在美国的F-16、F/A-18战斗机、B-2隐形轰炸机和爱国者导弹上,甚至连1997年7月在火星表面登陆的火星探测器,2008年5月在火星表面上登陆的凤凰号火星探测器,2011年首飞的X-47B无人机,2012年8月在火星表面上登陆的好奇号火星探测器上也都使用到了VxWorks。
Tornado是一套强大的图形化嵌入式集成开发环境,如图4所示的开发环境TornadoII,是最新一代嵌入式实时应用开发和调试环境的代表[2]。

图4 TornadoII界面
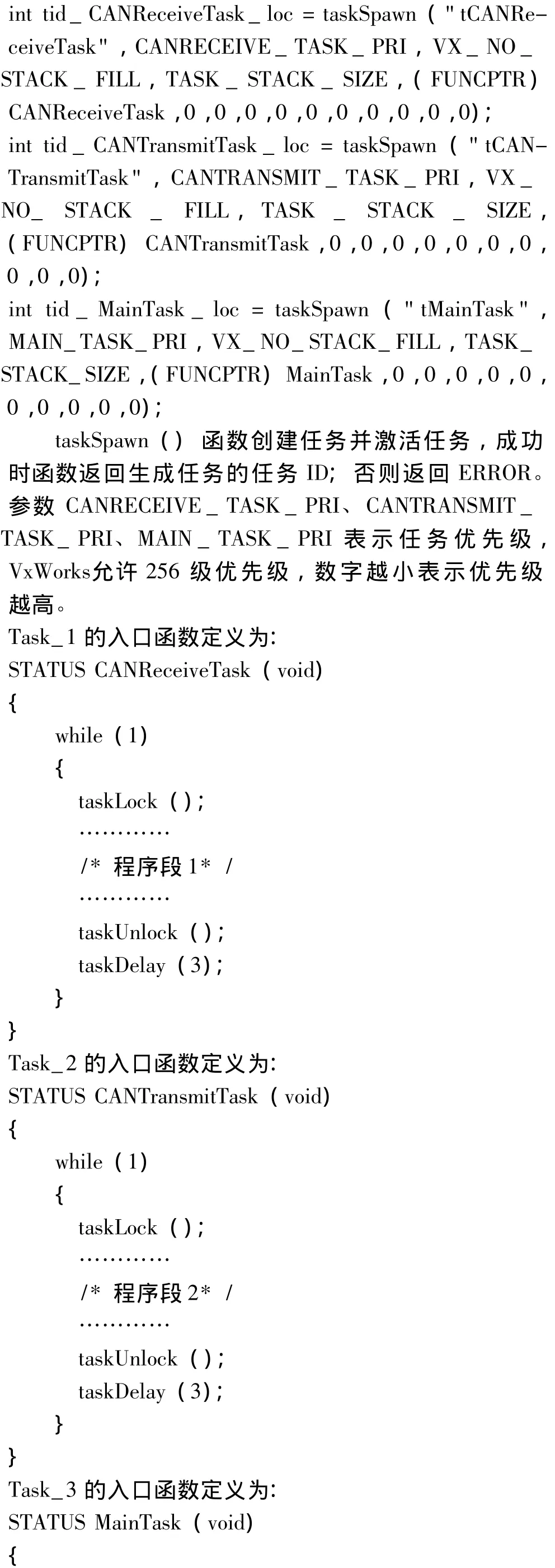
文中创建一个bootable型的工程,工程创建完毕后,产生、拷贝了一系列文件,其中usrAppInit.c中包含VxWorks映像应用程序入口函数usrAppInit(),类似于C语言的main()函数,usrAppInit()函数是应用程序入口函数。
如图4所示,将初始化程序initCan()放在程序入口函数usrAppInit()中,在initCan()函数中建立了Task_1、Task_2和Task_3三个任务:


工程任务框图如图5所示,3个任务之间的调度规则符合VxWorks系统任务调度规则,现做如下分析:由于 task_1的优先级是101,高于 task_2和task_3,task_1被优先执行,其次是task_2,最后是task_3,在执行程序段1时,根据taskLock()的特点,处理器不会被task_2或task_3抢占;task_1执行完成后,根据task_Unlock()的特点,处理器被释放,而后执行taskDelay(3),taskDelay(3)会导致task_1在指定的延时期间 (3*tick,60tick为1 s)放弃CPU,使任务处于Delay状态;之后执行task_2任务,最后执行task_3任务[3]。
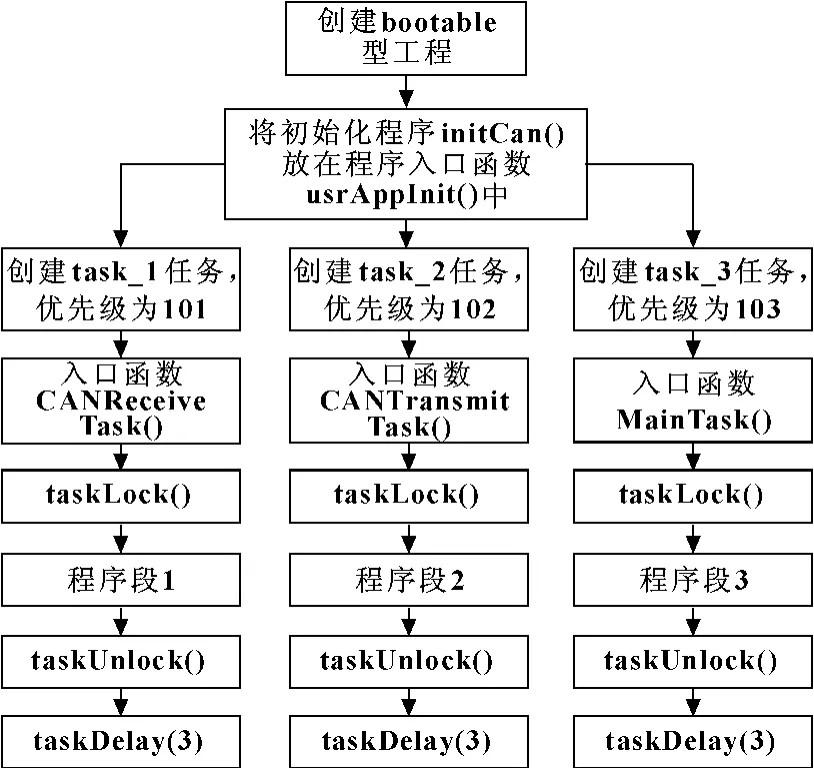
图5 任务框图
3 现场总线CAN网络
CAN总线又称为控制器局域网络总线 (Controller Area Network Bus),由德国Bosch公司发明,最初设计作为汽车环境中的微控制器通讯,目前已成为应用最广泛的现场总线之一。CAN总线是一种多主方式的串行通讯总线,具有低成本、高速率、高抗电磁干扰性、强的实时性、容错性、易扩展等特点,非常适合用于机器人系统的通讯总线。CAN网络在车辆上已经有较为广泛的应用,其分布式结构相对之前的集中式结构已经凸显出许多优点。CAN网络接线图[4]见图 6。

图6 CAN网络接线图
采用CAN网络进行远距离通讯,不规范的布线方式会导致通讯的可靠性、稳定性和传输数据的准确性明显下降。文中CAN网络节点见图3,实验表明这样的通讯方式可靠稳定。
4 电机速度插值分析
车辆上所订做的电机性能是在10 s内能够加速到3 600 r/min(线性增加),实验表明10 s内电机速度到达3 600 r/min时,车辆会有明显的冲击。采用速度插值方法能够使车辆很平稳地到达期望的速度。如图7所示,设电机当前速度是 v1,目标速度是v3,从时刻0到接受指令经过的时间是t3。在时间t2时,插值计算得到:

图7 速度插值示意图

5 结论
开发了适合该车辆的VxWorks控制系统,并列出了所创建的任务,当上位机发送CAN帧给下位机时,下位机将对CAN帧进行解析并作出应答,从而控制车辆。同时提出了全自主移动车辆的现场总线CAN网络,并进行了通讯的可靠性和稳定性实验。研究表明,文中提出的控制系统对全自主移动车辆控制平台有一定借鉴意义。
【1】曹艺辉.无人车独立悬挂系统设计与仿真[J].机电一体化,2012,19(2):17 -21.
【2】周启平,张杨,吴琼.VxWorks开发指南与Tornado实用手册[M].北京:中国电力出版社,2004.
【3】许斌.基于VxWorks系统的无人车GPS/INS组合导航研究[D].上海:上海交通大学,2012.
【4】饶运涛,皱继军,郑勇芸.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2006.
【5】VANDAPEL Nicolas,DONAMUKKALA Raghavendra Rao,HEBERT Martial.Unmanned Ground Vehicle Navigation Using Aerial Ladar Data[J].The International Journal of Robotics Research,January,2006,25(1):31 -51.
【6】吴绍斌,陈慧岩.军用地面无人车辆的发展[J].车辆与动力技术,2002(4):50-55.
