输出耦合功率分流液压混合动力系统控制策略
2013-09-17仝猛赵慧MonikaIVANTYSYNOVA
仝猛,赵慧,Monika IVANTYSYNOVA
(1.武汉科技大学机械自动化学院,湖北武汉430081;2.普度大学Maha流体动力研究中心,拉法叶47905,美国)
随着能源危机的加剧和环保问题日益严峻,对车辆燃油经济性和排放性能有极大提高和改善的混合动力传动技术逐渐引起了各国政府、研究机构及汽车制造商的高度重视,并得到越来越广泛的应用。
制动能再生技术为混合动力汽车的一项关键节能技术,与蓄电池、飞轮和超级电容等几种常用蓄能元件相比,液压蓄能器具有高比功率、高循环效率、长时间储能以及全充和全放能力强等特点[1]。因此,液压混合动力技术得到日益广泛的关注。
目前,世界各国研究开发的混合动力汽车根据动力系统的连接方式不同,可以分为串联式、并联式、混联式3种组合方式[2]。国内科研机构对液压混合动力的研究主要集中在串联式和并联式,混联式技术则发展缓慢。
混联式液压混合动力也称功率分流液压混合动力,是串联式系统和并联式系统的综合。它体现了串联式和并联式系统的优点,功率分流机构的引入,使传动系统效率更高,可传递的功率也较大,并可实现系统的无级调速[2]。但相比于串联式和并联式系统,功率分流液压混合动力系统结构和控制系统都更加复杂。因此,功率分流液压混合动力系统工作模式的确定是对该类系统研究的基础,能量管理策略是对该系统研究的重点和难点。
功率分流液压混合动力传动系统是以功率分流传动系统为基础,通过加入液压蓄能器,实现制动能回收和再利用。功率分流传动系统根据分流机构和汇流机构的不同有输出耦合和输入耦合等几种基本结构形式[3-4],文中主要以输出耦合功率分流液压混合动力系统为例展开研究。首先在第1节中分析了输出耦合功率分流传动系统 (不含液压蓄能器,不存在能量的回收与再利用)的组成、工作模式、功率流及控制策略,并以此为基础,在第2节中进一步分析了输出耦合功率分流液压混合力传动系统的工作模式及控制策略。
1 输出耦合功率分流传动系统分析
1.1 系统结构
图1为输出耦合功率分流传动系统结构简图。图中液压元件1和元件2分别为变排量液压泵/马达。发动机输出轴与行星排行星架相连,液压元件1转轴与行星排齿圈相连,液压元件2转轴与行星排太阳轮相连,行星排太阳轮通过主减速器与车辆驱动轴相连[3]。图中功率分流机构为内外啮合单行星排,功率汇流机构为固定轴齿轮,发动机输出功率被行星齿轮排分为两路,一路直接由机械轴传递,一路由液压系统传递,而后再由固定轴齿轮耦合传递至车辆驱动轴。

图1 功率分流传动系统结构简图
1.2 单行星排工作模式分析
输出耦合式功率分流传动系统中分流机构单行星排的结构如图2(a)所示,单行星排由太阳轮A、行星架B、齿圈C 3个元件组成,各元件之间的转速特性与转矩特性方程式如下[5]:

式中:ωA、ωB、ωC为行星排三元件旋转角速度,rad/s;
MA、MB、MC为行星排三元件转矩,N/m;
i0为行星排结构传动比;
ZA、ZB、ZC为行星排三元件齿数。
因行星排结构传动比i0为负值,可知太阳轮与齿圈转矩方向相同,行星架转矩方向与其相反。
单行星排三元件转速方向可用图解法来确定,3个速度向量起点在同一条垂线上,终点可用直线连接[5]。如图 2(b)所示。

图2 单行星排结构与转向示意图
现假设发动机转速确定,可知行星排行星架B转速ωB确定,定义发动机转速为正,发动机输出转矩为正,即行星排行星架转速与输入转矩为正,功率通过行星架输入行星排。
根据车辆在不同工况下的行驶速度要求和行星排特性,分析行星排的工作模式如下:
(1)车辆倒车
行星排太阳轮与行星架转向相反,而齿圈与行星架转向相同。太阳轮转向与转矩同为负,转矩与转速方向相同,输入功率;而齿圈转速为正,转矩为负,转速与转矩方向相反,输出功率。
(2)车辆怠速
太阳轮转速为零,无功率流;齿圈与行星架转向相同,齿圈转速与转矩方向相反,输出功率。
(3)车辆起步加速
太阳轮转速由零逐渐增大,其转速与转矩方向相反,输出功率;而齿圈转速逐渐减小,其转速与转矩方向亦相反,输出功率。
(4)全机械工作点
当车速增加到一个确定速度时,齿圈转速减小为零,无功率流。此时太阳轮依然输出功率,定义此时车速为全机械工作点速度 (vm)。
(5)车辆正向加速
车辆继续加速,太阳轮速度持续增加,直到太阳轮速度达到最大,此过程中太阳轮依然输出功率;而齿圈转速负方向增加,其转速与转矩方向相同,输入功率。
综上,输出耦合功率分流传动系统中单行星排的工作模式和三元件的转速、扭矩、功率流方向如表1所示。

表1 单行星排三元件工作模式
1.3 系统工作模式及控制策略
行星排是2自由度机构,必须有两个约束才能确定其动作。行星架由发动机控制其转速,假设发动机输出转速确定,则行星架转速可确定,此为行星排提供第一个约束;太阳轮与齿圈通过液压系统相连,由两个液压泵/马达之间的传动比来决定太阳轮、齿圈的转速关系,此传动比为行星排提供第二个约束。由以上分析可知车辆速度可由液压系统的传动比控制,而该传动比是通过调节两泵/马达的排量来控制,即可用期望车速做为泵/马达排量控制输入信号来实现车速控制。
定义V表示液压元件排量,Vmax表示泵/马达的最大排量,ε=V/Vmax表示变量泵/马达的相对变量率,则ε满足-1≤ε≤1。当ε=0时,泵/马达排量为零,当ε=-1或ε=1时,泵/马达排量最大。设液压元件1与液压元件2之间的传动比为iy,则iy∝ε2/ε1。
结合行星排工作模式来确定传动系统工作模式及车辆速度控制策略如下:
(1)车辆倒车
车辆倒车时行星排太阳轮转速与齿圈转速相反,因此iy小于零,则ε2/ε1<0。车辆车速从零至倒车最大速度的变化过程中,太阳轮、齿圈转速增大,但齿圈转速变化率大于太阳轮。可得iy绝对值减小,此时ε1负向增大可实现车速要求。
(2)车辆怠速
车辆怠速时,太阳轮转速为零,齿圈转速为正。液压系统传动比iy为无穷大,则ε2/ε1无穷大,此时ε1=0,ε2=1可实现车速要求。
(3)车辆起步加速 (v<vm)
车辆起步加速,太阳轮转速正向增大,齿圈转速正向减小。iy从无穷大逐渐减小,则ε2/ε1>0,此时ε2正向减小或ε1正向增大可实现车速要求。
(4)全机械工作点 (v=vm)
当太阳轮转速增大到一个确定值,齿圈转速减小到零时,液压元件1转速为零,液压系统不再传递功率,达到系统全机械工作点。传动比iy减小至零,则ε2/ε1=0,此时ε2=0,ε1=1可实现车速要求。
(5)车辆正向加速 (v>vm)
若要求车速继续增加,即太阳轮转速继续增加,则需齿圈转速负方向增加。可知传动比iy小于零,且绝对值增大。此时ε2负向增大可实现车速要求。
通过对车辆不同行驶工况下液压元件1、2排量变化的分析,再考虑到液压元件排量调节的连续性,可确定液压元件排量的调节方式随期望车速的变化曲线如图3所示。
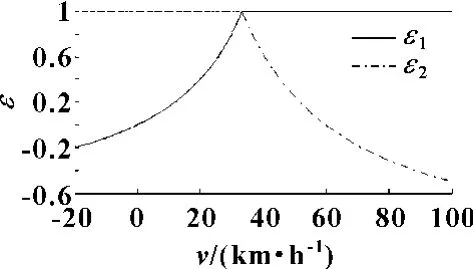
图3 液压元件排量调节曲线
通过上述分析,可确定输出耦合功率分流传动系统的速度控制策略为:在不同的期望车速范围内,依据图3所示车速与液压元件排量的关系,分别调节液压元件1、2的排量,以实现期望车速。这种控制方法称为顺序控制模式。系统控制方框图如图4所示。

图4 功率分流传动系统控制方框图
1.4 系统功率流分析
根据上述对行星排功率流方向的分析,可得出输出耦合式功率分流传动系统的功率流程,如图5所示。

图5 功率分流传动系统功率流图
车辆倒车时系统输入功率通过液压通道传递至输出端,但有部分功率通过机械通道流回输入端,如图5(a)所示;车辆正向前进过程中共有3种功率流模式,车速小于全机械工作点车速时系统输入功率通过液压、机械两个通道传递至输出端,如图5(b)所示;车辆在全机械工作点时系统输入功率只通过机械通道传递至输出端,如图5(c)所示;当车速大于全机械工作点车速时,输入功率通过机械通道传递至输出端,有部分功率通过液压通道流回输入端,如图5(d)所示。
2 输出耦合功率分流液压混合动力传动系统分析
输出耦合功率分流液压混合动力传动系统结构如图6所示,系统中蓄能器用于能量的回收与储存。在机械结构上,该系统与输出耦合功率分流传动系统完全相同。在液压系统方面,输出耦合功率分流液压混合动力传动系统包含一个高压蓄能器和一个低压蓄能器。高低压蓄能器分别连接在油路A和油路B上。利用液压阀来控制蓄能器与液压回路的通断。

图6 输出耦合功率分流液压混合动力传动系统结构简图
为了提高效率,减少排量,要尽可能地回收制动能量,用于驱动汽车起步加速。相比于输出耦合功率分流传动系统,输出耦合功率分流液压混合动力传动系统为了实现能量的回收和再利用,必须使用更复杂的控制策略,以实现系统更多的工作模式[6-7]。
(1)车辆起步
车辆起步过程发动机处于高油耗工况,如果采用蓄能器驱动车辆起步,当车速达到一定速度 (va)后,再关闭蓄能器由发动机驱动车辆,这样则可节省燃油,提高燃油利用率。在这种工作模式中高压蓄能器内压力必须保持在一定压力 (ps)之上,以确保液压元件2能够输出足够大的转矩驱动汽车加速。在此工作模式下系统的功率流如图7所示。
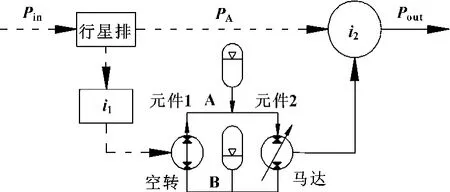
图7 蓄能器驱动模式系统功率流图
液压元件1的排量由车速及高压蓄能器压力控制,即车速小于va、高压蓄能器压力大于ps时液压元件1的排量为零,发动机空转,由蓄能器驱动车辆。液压元件2的排量由期望车辆牵引力和高压蓄能器压力控制,以确保液压元件2能提供足够转矩。
(2)发动机驱动模式
如果车辆以一定的速度行驶,或者加速过程中车速大于va或高压蓄能器压力小于ps时,蓄能器系统关闭,车辆完全由发动机驱动。此时,输出耦合功率分流液压混合动力传动系统与输出耦合功率分流传动系统工作模式和控制策略完全相同。
(3)再生制动模式
在车辆刹车时,液压元件2必须以泵模式工作,为驱动轴提供一个负转矩,液压元件1的排量为零。系统功率流如图8所示。从液压元件2流出的高压油将为高压蓄能器充能,实现对刹车能的回收、储存。液压元件2的排量及其输出的转矩由期望车速控制。高压蓄能器充满后高压油将通过溢流阀流入低压蓄能器。此时没有能量传递至液压元件1或发动机。考虑到安全性能和车辆紧急制动的情况,系统应该加入附加制动器。

图8 再生制动模式系统功率流
综上所述,混合动力传动系统控制策略的关键问题是在不同车辆行驶工况下对两种动力源的选择。输出耦合功率分流液压混合动力传动系统以期望车速作为控制输入信号,并实时监控高压蓄能器的储能状态和实际车速,作为能源选择的依据。在起步加速时,若高压蓄能器内压力大于ps,用蓄能器驱动车辆。此时液压元件1排量为零,发动机空转。当蓄能器中压力小于ps或车速达到一定速度 (va)时关闭蓄能器,由发动机驱动车辆,使用顺序控制策略,控制流程如图9(a)所示。车辆倒车时的控制策略与起步加速相同。车辆刹车时,可根据实际情况判断是否需要紧急制动。非紧急制动时采用能量再生制动,回收车辆动能储存于蓄能器中,紧急制动时采用摩擦制动器制动,控制流程如图9(b)所示。

图9 输出耦合功率分流液压混合动力传动系统控制流程图
3 总结
以输出耦合功率分流传动系统为基础,分别分析了该传动系统在车辆倒车、怠速、起步加速、全机械工作点、正向加速等不同工况下的工作模式、功率流特性,提出了针对该系统的顺序控制策略。并以此为基础,分析了输出耦合功率分流液压混合动力传动系统的结构、工作模式,初步探讨了两种能源的选择方法和控制方法,提出了针对输出耦合功率分流液压混合动力传动系统的控制流程,使该系统能够综合串联式和并联式系统的优点,更好地实现车辆排放和燃油消耗的控制目标。
【1】苏欣平,肖汇,杨钢,等.混合动力汽车的效率分析及发展趋势[J].机床与液压,2011,39(20):57 -58.
【2】杜玖玉,苑士华,魏超,等.车辆液压混合动力传动技术发展及应用前景[J].机床与液压,2009,37(2):181-184.
【3】CARL Blake.Hydraulic Power Split Continuously Variable Transmissions For Heavy Duty Truck Applications[D].Purdue University,2007:4 -11,15 -20.
【4】WILLIAME Kyle.Energy Recovery For Hydraulic Input Coupled Power Split Drives[D].Purdue University,2007:13-29.
【5】刘修骥.车辆传动系统分析[M].国防工业出版社,1998:49 -51,70 -73.
【6】赵克刚,罗玉涛.一种液压储能汽车的混联式新方案[J].液压与气动,2007(4):18 -21.
【7】杜玖玉,苑士华,胡纪滨,等.新型车用功率分流式液压混合动力传动研究[J].液压与气动,2008(8):22-25.
