基于颜色空间转换的运动目标检测与阴影去除
2013-09-17朱金艳
李 静,车 进,朱金艳
(宁夏大学物理电气信息学院,宁夏银川 750021)
基于颜色空间转换的运动目标检测与阴影去除
李 静,车 进,朱金艳
(宁夏大学物理电气信息学院,宁夏银川 750021)
针对室内视频监控中运动目标检测常出现的阴影误检,提出了一种基于颜色空间转换的自适应背景建模和阴影消除算法。在RGB空间采用自适应背景差对视频图像进行前景背景分离,并将检测出的前景目标锁定在活动轮廓矩形框内进行目标跟踪,对于误检的虚假目标(即阴影),利用其亮度等信息,在HSV空间去除。经实验验证,该算法对阴影的去除有良好的效果,能准确检测出真实目标。
运动目标检测;背景建模;HSV空间;阴影去除
运动目标的检测是视频监控系统的首要问题,运动目标提取的好坏直接影响后续的目标跟踪、行为分析等问题[1-3]。光线的强弱、方向会随着天气、时间的不同而发生无规律的变化,使得阴影具有很强的不确定性。阴影和运动目标与背景之间有很大的灰度差值,而且阴影与产生阴影的目标具有相同的运动特征,这使得运动目标检测中会产生与阴影有关的一系列问题,如阴影会造成运动目标形状的变化、目标的合并、目标丢失,这些问题的存在会对视频监控的后续工作带来负面影响。而目标检测算法本身并不能识别和消除阴影,因此必须有特定的算法对检测出的前景目标进行后处理。
与RGB颜色空间相比,HSV颜色空间更接近人眼视觉模型,能直接体现颜色的亮度信息,可以更好地量化阴影和运动目标之间的差别[4]。基于HSV颜色空间的阴影模型,利用阴影具有色度与背景相差不大,只是亮度比背景暗的特性,分离亮度和色度成分,并通过对亮度进行阈值分割,去除阴影,保留目标部分。
目前对于目标检测和阴影去除存在着大量的研究,文献[5]中用高斯混合模型进行背景重建,并根据阴影的光学特性进行了阴影区域的预检测,得到疑似阴影区域,再用基于局部纹理分析的方法消除阴影;文献[6]中基于模糊集建立颜色和空间信息之间的关联,通过模糊逻辑检测运动目标并消除阴影。本文提出了一种基于颜色空间转换的自适应背景建模和阴影消除算法,在RGB空间进行目标检测,并将检测出的前景目标锁定在活动轮廓矩形框内进行连续实时地跟踪,对于目标中的阴影,利用其亮度信息,转换至HSV空间消除。在HSV空间去阴影的最大优势是能在检测阴影的同时就消除阴影。
1 自适应背景建模
由于室内环境变化相对简单,同时也为了提高运算速度,本文在运动目标检测中没有选取当前的研究热门混合高斯背景差算法[7-8],而是采用一种简单、快速的自适应背景建模法分离前景背景。
1.1 运动目标的检测
默认视频第一帧图像为背景,将其与当前帧图像做差,将差值取绝对值与阈值比较,判定是否为前景目标,Mt(x,y)=1时,即认为是目标,判决公式如下

Mt(x,y)=0时,判定不为前景,则进行背景更新,学习速率α取经验值,更新公式如下
用半径为3的圆盘型结构元素对检测出的前景图像进行形态学膨胀操作,去除图像边缘噪声,填充图像内部空洞,完善细节,结构元素如图1所示。
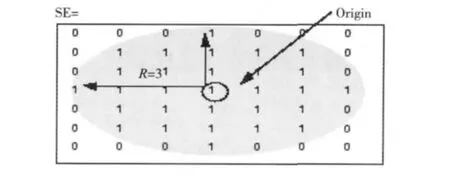
图1 圆盘结构元素
1.2 目标标记
在图像分析中,以一种方式表示检测到的或跟踪过程中的物体,以减少冗余信息,就是目标标记。常用的有点标记法、矩形框标记法、外轮廓标记法、块标记法等。本文选用矩形框标记,即用包含目标区域的矩形框表示目标。
1)初步确定目标轮廓
对膨胀后的图像进行行列扫描,若存在某一像素值dim(x,y)=1,则判定为前景,所有值为1的像素构成一个矩阵dim,用bwtraceboundary函数跟踪dim中目标的轮廓,非零像素表示目标,零像素构成背景。
2)目标轮廓面积分析
判定各前景目标轮廓边界长度,进行轮廓面积分析,如果轮廓面积小于规定的阈值,则滤除这些轮廓标记,以避免检测环境中的微小噪点被误判为运动目标;大于阈值的则进一步确定为目标。在目标轮廓面积分析中,设定的轮廓阈值可根据室内监控环境面积以及摄像头与主要监控地点的距离进行调节。
3)模板与后续帧图像的匹配
剪切前景目标图像,读取其轮廓行列边界作为模板,将模板边界与后续帧图像检测的前景轮廓边界进行比较,更新模板确保其足够小,用函数normxcorr2计算模板与后续帧前景轮廓的互相关矩阵,返回互相关中的最相关为最佳匹配,最终确定最佳匹配为标记运动目标的矩形框。
4)活动轮廓里的跟踪
活动轮廓匹配跟踪的基本思想是:取匹配后的轮廓模板,在后继帧的前景图像中跟踪目标轮廓,并且该轮廓能够自动连续实时地更新。即始终检测视频每一帧中出现的运动目标,更新并确定矩形框为最佳匹配,对目标进行锁定跟踪。
2 HSV空间去除阴影
检测出的前景,通常包括运动目标、阴影以及一些杂小噪点,去除阴影的原则就是只保留运动目标。基于色调(H)、饱和度(S)和亮度(V)的颜色模型称为HSV颜色模型。HSV模型可在彩色图像中消除亮度分量的影响从而获得色调和饱和度的彩色信息,这反映了人的视觉系统感知色彩的方式,所以人能更自然、更直观地解释和感受颜色[9]。
基于HSV颜色空间的阴影模型,比RGB颜色空间更准确地检测出阴影。该方法通过分析阴影与背景在HSV颜色空间中的亮度特性,利用阴影与运动目标在HSV的3个分量的不同特点,计算每个分量相应的阈值,通过阈值分割并消除阴影。本文对当前帧像素和其对应的背景像素采用如下公式判断并去除阴影,公式为
式中:IH(x,y),IS(x,y),IV(x,y)分别表示当前帧图像像素点I(x,y)的 HSV 分量;BH(x,y),BS(x,y),BV(x,y)分别表示背景图像像素点的HSV分量;当I(x,y)被判定为阴影,则该点的sp(x,y)值为1,否则sp(x,y)值为0;参数αS和βS控制亮度,取值范围均为(0,1);αS取值要考虑阴影的强度,背景上投射的阴影越强,αS越小;βS用来调节当前帧的亮度不能和背景太相似[3];参数τS和τH为饱和度差和色调差的阈值。本文采用实验方法获得参数取值,利用部分训练数据进行阴影检测和性能分析,选取性能较好的参数组合。一般来说,通过实验获得参数的方法在相近的场景和光照条件下都能获得较好的分割结果。
3 算法流程
算法流程主要分为两个阶段:目标检测和阴影去除。在运动目标检测过程中,通过路径读取视频,将视频转换成帧图像,确定第一帧为背景图像,将循环读取的帧图像与当前背景用差分法得到差分数据,若阈值判定是前景,则进行后处理,判定不是前景则进行背景更新。然后对前景目标进行轮廓面积分析,以便找出最佳匹配的模板,进行矩形框里的跟踪。在阴影去除过程中,将第一阶段得到的视频图像进行颜色空间转换,通过阴影判决公式检测出误检目标,对其进行阈值分割、消除阴影,最终得到清晰的运动目标。算法流程如图2所示。
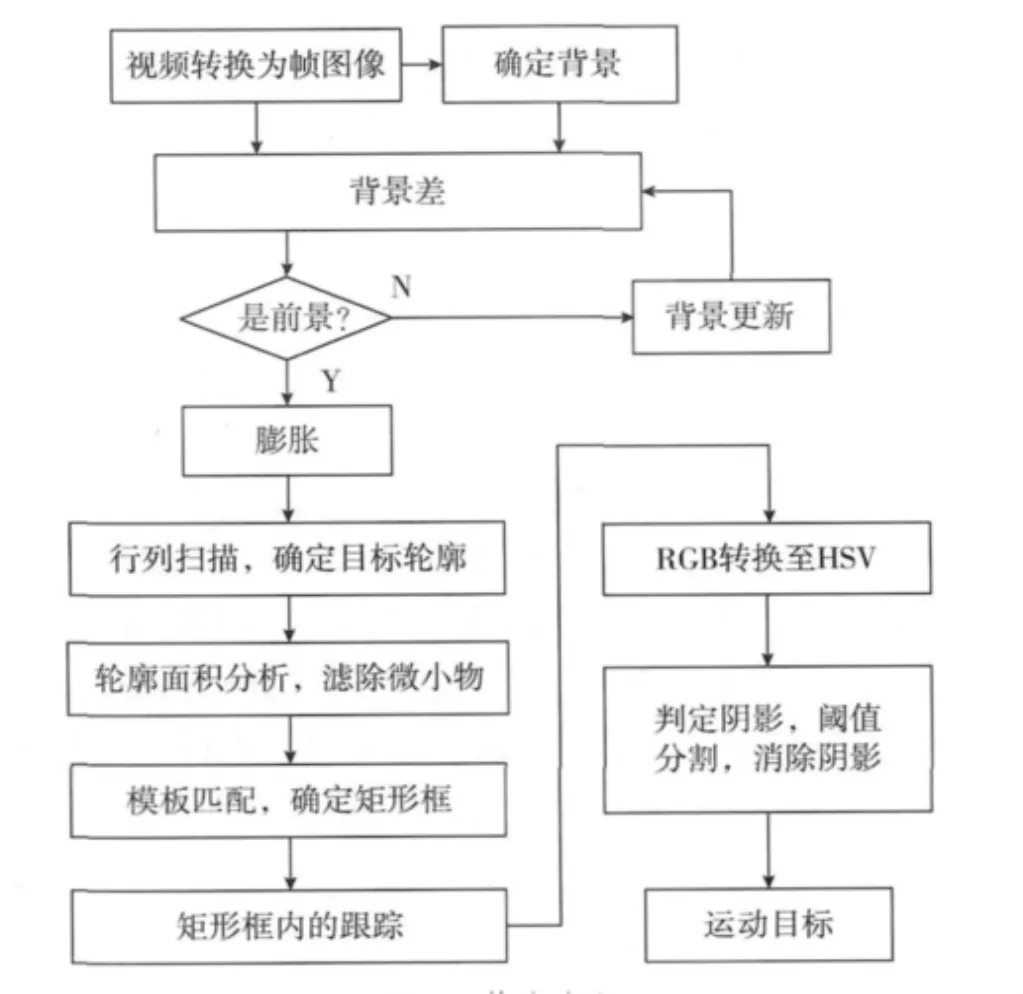
图2 算法流程
4 实验结果
实验选取了2段室内视频进行验证,分别为下载视频video1、采集视频video2,2段视频由于场景中不同静态物体的光线变化产生阴影,造成目标误检,使得检测中出现了2个矩形框,实验目的是去除误检矩形框中的虚假目标。由于2段视频光源不同,分别为灯光和日光,导致HSV各分量不同,去阴影时所选取的阈值也就不同,具体参数值如表1所示。
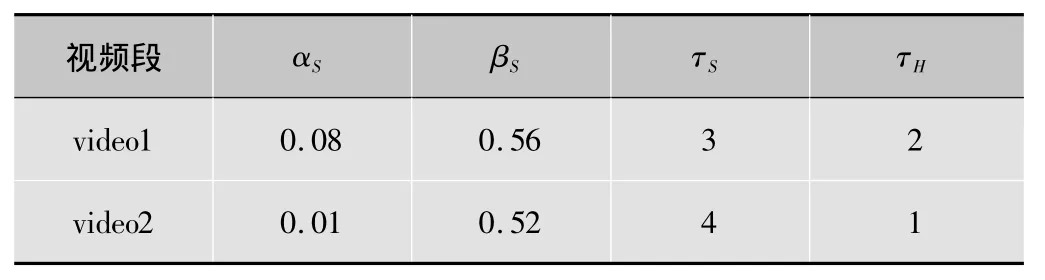
表1 HSV空间去阴影参数值
视频video1中第50帧,由于人经过使金属桶表面光线发生变化,产生虚假目标,造成阴影误检,如图3所示。
视频video1中第65帧,由于电压不稳使顶灯照射的光线发生变化,产生虚假目标,造成阴影误检,如图4所示。
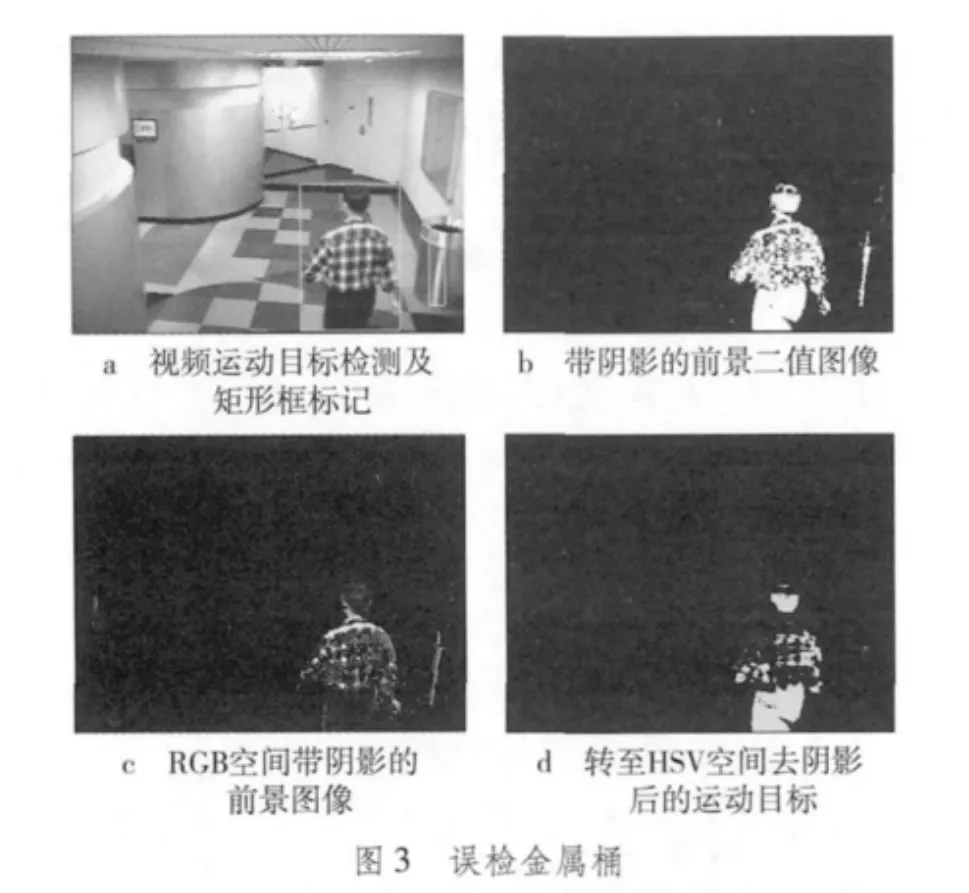
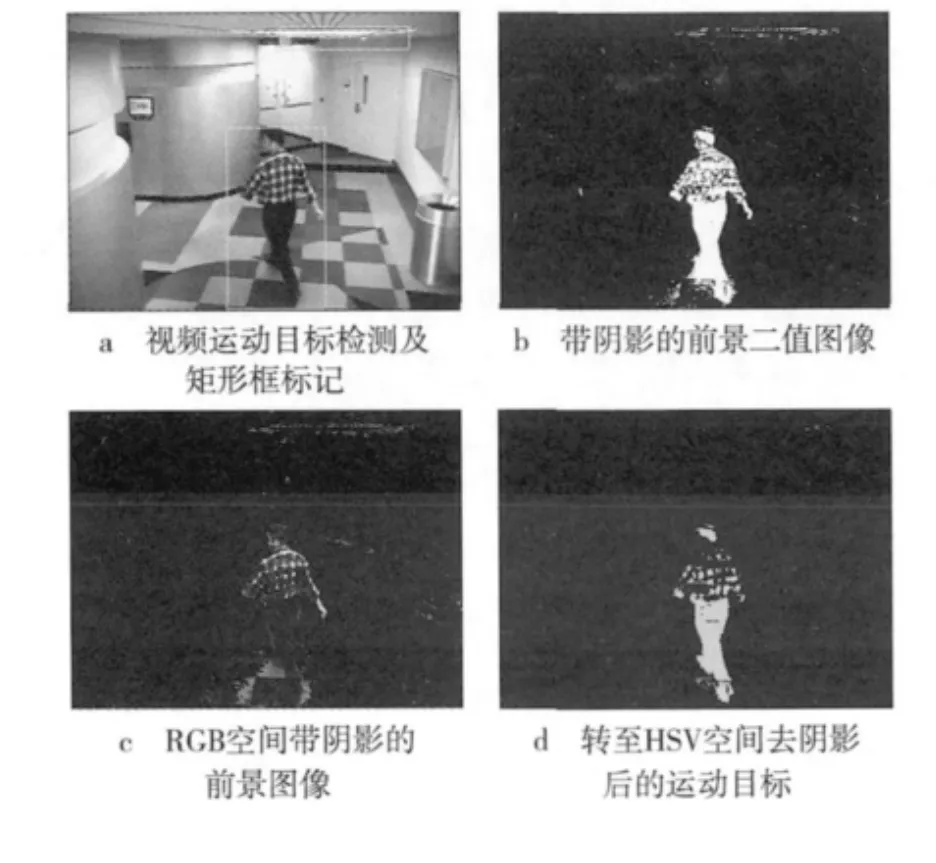
图4 误检顶灯
视频video2中第119帧,由于人在地面的投影,产生虚假目标,造成阴影误检,如图5所示。
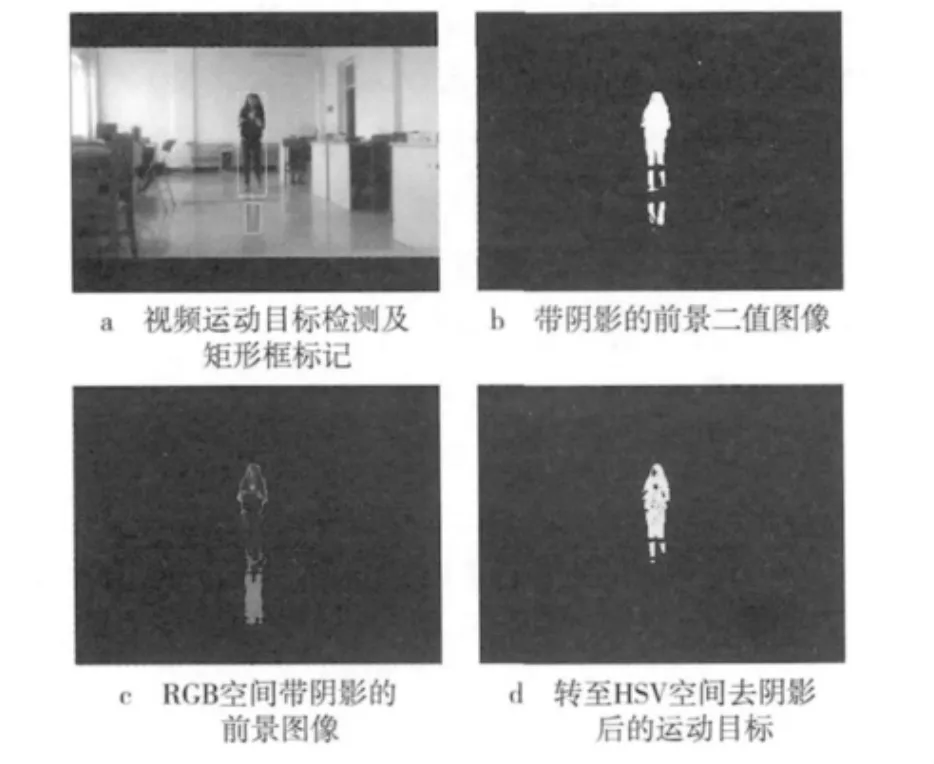
图5 误检人影
视频video2中第217帧,由于人经过使桌子侧面光线发生变化,产生虚假目标,造成阴影误检,如图6所示。
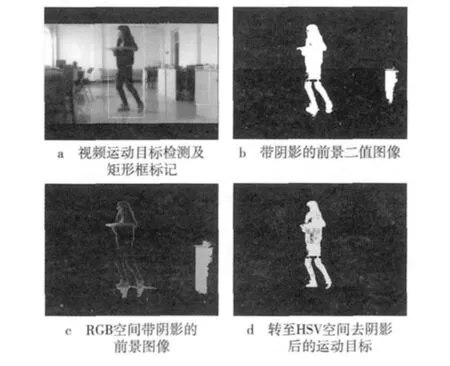
图6 误检桌侧面
5 结论
在运动目标检测中,运动目标的阴影由于与背景有较明显的差别,所以经常被误检为前景,会影响后续的跟踪、识别和行为分析的结果。本文针对室内视频监控中运动目标检测常出现的误检,提出了一种基于颜色空间转换的自适应背景建模和阴影消除算法,在RGB空间采用自适应背景差对视频图像进行前景背景分离,并对检测出的前景目标进行矩形框目标跟踪,对于误检的虚假目标(即阴影),利用其亮度信息,在HSV空间去除。经过2段视频处理验证,该算法运算简单,对阴影的去除有良好的效果,能准确检测出真实目标,有一定的实用性。
:
[1]丁忠校.视频监控图像的运动目标检测方法综述[J].电视技术,2008,32(5):72-76.
[2]蒋巍,张健,曾浩.基于智能视频监控系统的运动目标检测和跟踪[J].电视技术,2012,36(5):110-114.
[3]GIACINTO G.Moving targets in computer security and multimedia retrieval[J].Trans.Machine Learning and Data Mining,2011,4(1):30-52.
[4]林庆,徐柱,王士同,等.HSV自适应混合高斯模型的运动目标检测[J].计算机科学,2010,37(10):254-256.
[5]任建强.一种自适应的运动目标阴影消除新算法[J].计算机工程与应用,2010,46(36):188-191.
[6]ZHU Mingfeng.A novel approach for shaded moving object detection based on Fuzzy sets[J].Advanced Materials Research,2012(33):5293-5297.
[7]刘鑫,刘辉,强振平,等.混合高斯模型和帧间差分相融合的自适应背景模型[J].中国图象图形学报,2008,13(4):729-734.
[8]黄鑫娟,周洁敏,刘伯.自适应混合高斯背景模型的运动目标检测方法[J].计算机应用,2010,30(1):71-74.
[9]方贤勇,贺彪,罗斌.一种基于HSV颜色空间的新码书模型[J].计算机应用,2011,31(9):2497-2501.
Moving Target Detection and Shadow Elimination Based on Color Space Conversion
LI Jing,CHE Jin,ZHU Jinyan
(School of Physics and Electronic Information Engineering,Ningxia University,Yinchuan 750021,China)
An algorithm of adaptive background modeling and shadow elimination based on color space conversion aims at the error detection of shadow in moving target detection for indoor video surveillance is proposed.The adaptive background difference is used to separate background and foreground of image and the detected target is locked in active contour(it means rectangular box)for target tracking in RGB space.False target(it means shadow)of error detection is removed by using its brightness and other information in HSV color space.The experimental results prove that the algorithm has a good effect for shadow elimination.Moreover,it can detect the real target accurately.
moving target detection;background modeling;HSV color space;shadow elimination
TN941.1
A
【本文献信息】李静,车进,朱金艳.基于颜色空间转换的运动目标检测与阴影去除[J].电视技术,2013,37(13).
宁夏自然科学基金项目(NZ1138)
李 静(1987— ),女,硕士生,主研数字图像处理技术;
车 进(1973— ),硕士生导师,副教授,主要从事图像处理及智能视频技术研究;
朱金艳(1989— ),女,硕士生,主研数字图像处理技术。
责任编辑:任健男
2012-12-30
