某高空高速无人机载电子设备热设计试验研究*
2013-09-16杨冬梅
杨冬梅,魏 涛
(南京电子技术研究所, 江苏 南京 210039)
某高空高速无人机载电子设备热设计试验研究*
杨冬梅,魏 涛
(南京电子技术研究所, 江苏 南京 210039)
文中研究了某高空高速无人机载电子设备的热设计问题。针对某高空高速无人机上冷却资源稀缺的特点,提出了结构热惯性和液氮冷却相结合的冷却方式,并设计了2种冷却单元的结构形式。通过实验研究,得到了不同供液工况下的电子设备温度分布,并分析了液氮消耗量对单元温度分布的影响。结果表明:在极少的载机冷却资源条件下,该热设计方式仍可以保障电子设备工作在允许的温度范围内。该设计方式可以供类似热设计参考。
无人飞行器;液氮;电子设备;热设计
引 言
高空高速无人飞行器的飞行跨越大气低层和高层,飞行时间很短,飞行高度和速度变化快、范围宽[1]。当其在大气层中飞行时,和空气摩擦产生的热量使飞行器表面温度极高,进而使设备舱内的环境温度过高,造成设备舱内电子设备所处的工作环境比常规航空器更加严酷。要保证电子设备正常工作,就必须对设备舱内的电子设备进行专项热设计。
高空的空气非常稀薄,不能利用环境空气对电子设备进行散热,因而一般考虑利用单元自身的结构热惯性和相变材料吸热。但相变材料的散热能力随着热流密度的增加而减弱[2],其原因在于目前较常用的相变材料为石蜡,而石蜡本身的导热系数很低,仅0.158 W/(m·K),铝合金为204 W/(m·K),而且熔化后流动性能差,当局部热流密度较高时,热源处的石蜡已经熔化,热量来不及传至稍远处的石蜡,使热源处温度迅速上升,因而无法满足较高热流密度芯片的工作温度要求。
液氮是一种常压下的低温液体,通常用于低温环境工程,如航天环境模拟器、高温超导电缆冷却、医学冷冻治疗等领域[3]。国外已经有在高空高速无人飞行器上将液氮作为冷却剂使用的先例,而国内在机载电子设备的冷却中使用液氮进行冷却的应用很少,且尚无机载电子设备液氮冷却的相关报道。
本文通过对安装于某高空高速无人飞行器的电子设备进行液氮冷却,进行了热设计和热试验,给出了针对该平台的电子设备的热设计方法。
1 问题描述
某高空高速无人机飞行在30 000 m的高空,带有液氮瓶,用于飞行器热控的冷却资源。设备舱内电子设备总热耗为400 W,局部最大热流密度为20 W/cm2。芯片允许壳温为65 ℃[4],载机能够提供的液氮流量为30 kg/h,电子设备的工作时间为20 min。
机载液氮资源十分有限,在使用液氮冷却方式的同时,如何充分利用电子设备自身的热惯性,提高液氮资源的使用效率,从而尽可能减小对载机的冷却资源需求,需要有针对性的定量研究;另一方面,冷板的冷却效果受到发热模块与冷板安装形式的影响。针对以上原因,根据机载产品常用的2种安装形式[5-6],设计了2种实验单元:1)穿通式冷却模块,模块直接贴装在冷板上;2)传导式冷却模块,模块通过楔形锁紧机构与冷板连接,热量通过模块散热板传导至楔形锁紧机构上,再传导至冷板。如图1所示,实验单元主要由冷板、传导式模块和穿通式模块组成。其中,传导式模块和冷板之间的连接采用电子插箱常用的锁紧机构压接方式;穿通式模块和冷板直接贴合安装。2种模块并联安装于一块冷板上,因而两者之间不会互相影响。将模块中安装的40个发热电阻(底面积为3 mm × 15 mm,100 Ω)作为模拟热源,发热电阻和冷板间涂抹导热硅脂(接触热阻为0.48 ℃·cm2/W)。发热电阻的热量通过模块传导至冷板表面,再由冷板内的液氮带走。
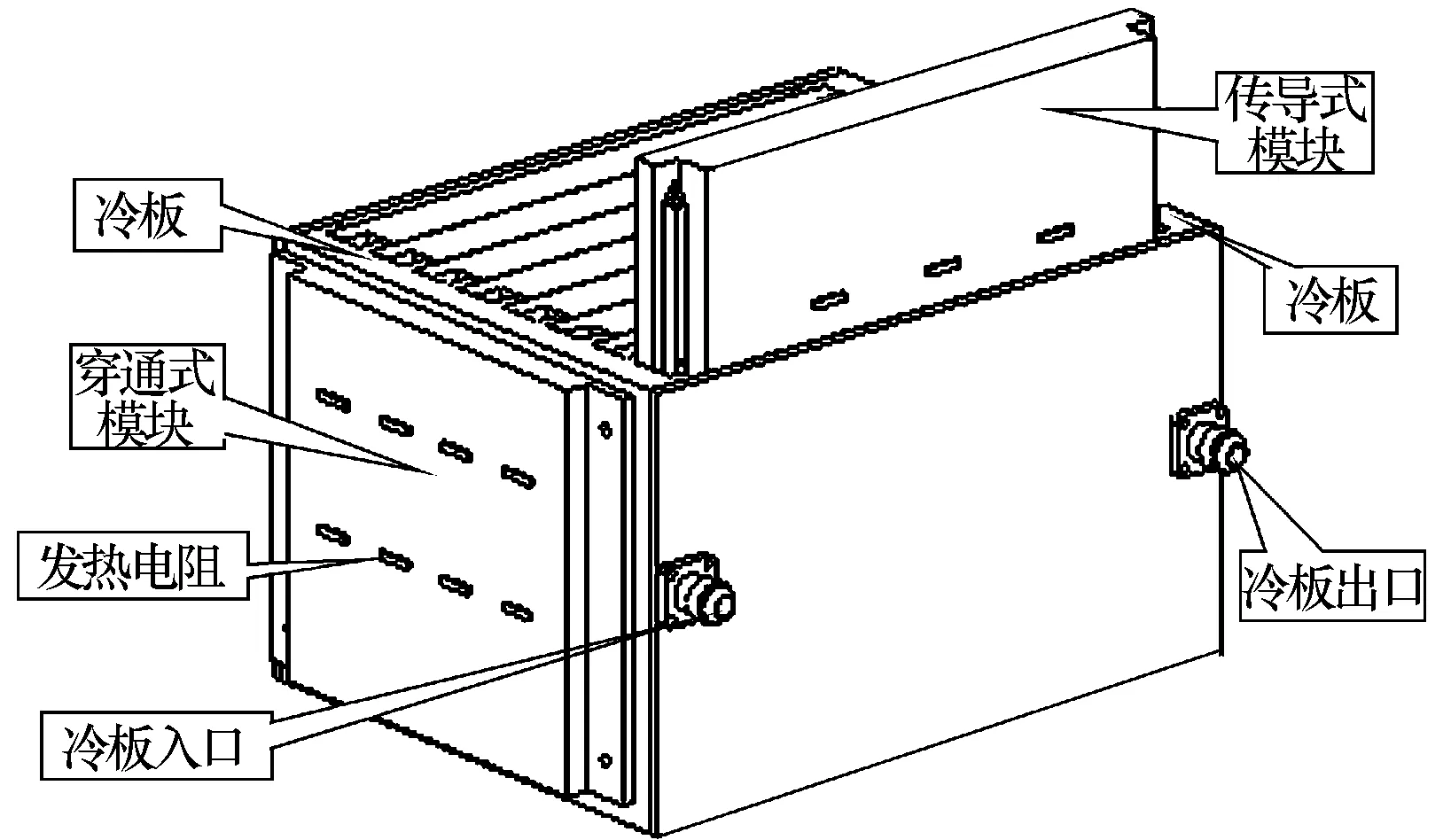
图1 实验单元结构图
当热耗为10 W时,发热电阻的热流密度为22 W/cm2,略大于该电子设备的最大热流密度,满足热流密度的等效要求。
2 实验系统简介
实验系统如图2所示。液氮从杜瓦瓶中流出后,首先经过调节阀,然后进入冷板进行换热,吸收热量后的液氮气化成为氮气,从冷板出口排出。液氮的进口压力通过冷板进口前端的压力表测试,流量通过冷板出口后端的流量计测试,发热电阻下方的冷板温度通过一组热电偶进行测量,并利用数据采集设备记录,热电偶的安装位置见表1。在实验过程中,为减少系统与环境之间的热交换,使用保温材料包裹整个实验单元。
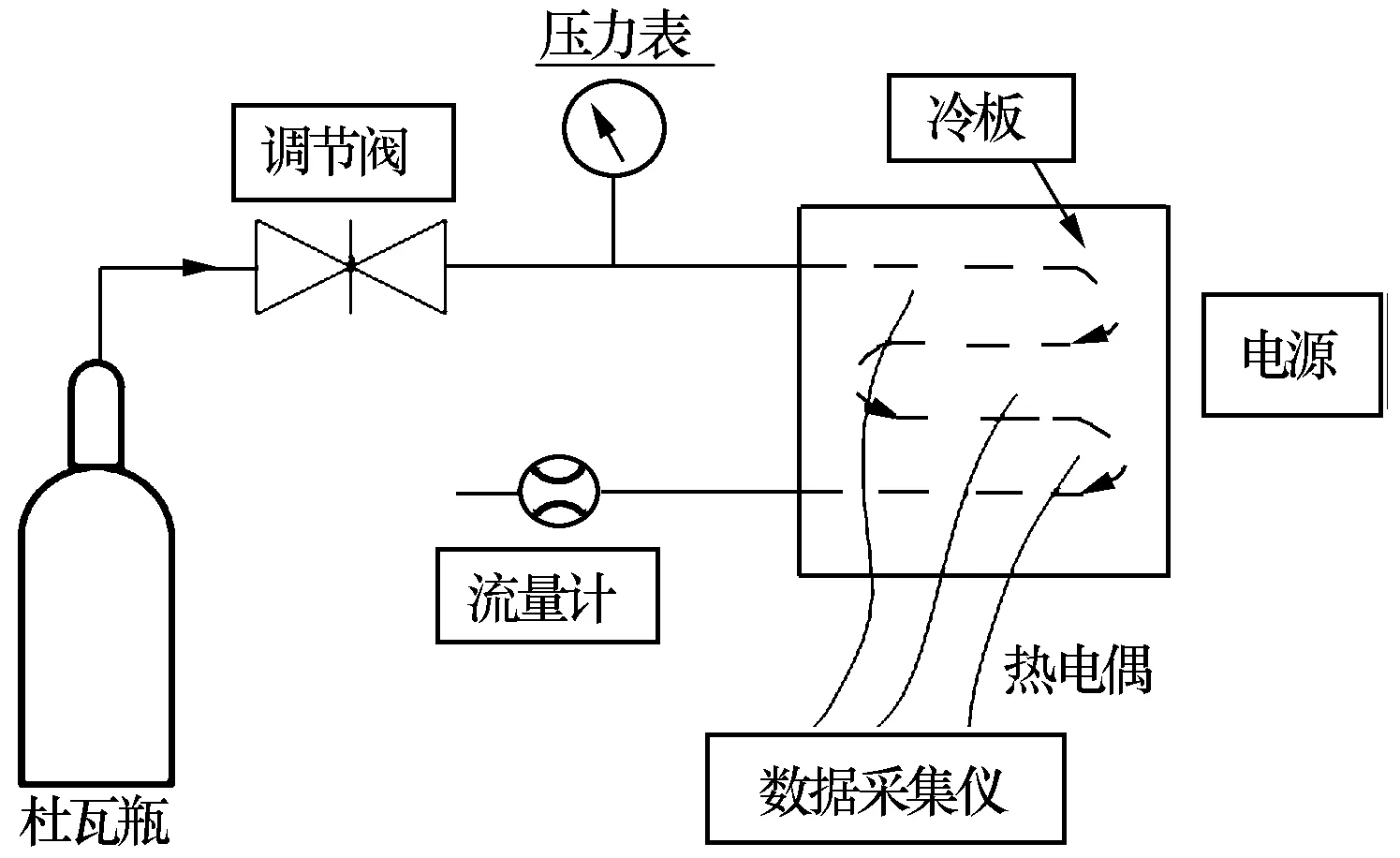
图2 实验系统示意图
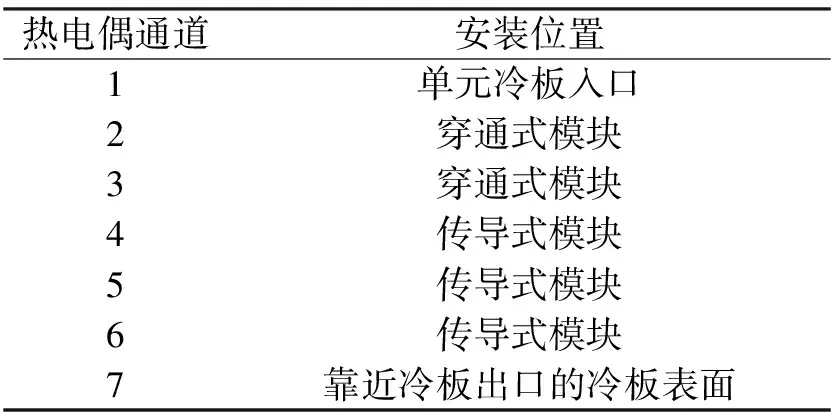
热电偶通道安装位置1单元冷板入口2穿通式模块3穿通式模块4传导式模块5传导式模块6传导式模块7靠近冷板出口的冷板表面
在实验中,每个热源的热耗为10 W,液氮流量为30 kg/h。为分析实验系统的瞬态温度响应,进行了4组对照实验,其实验条件为:
1)工况一:热源与冷却系统同时开启,运行20 min;
2)工况二:热源开启3 min后打开冷却系统,共运行20 min;
3)工况三:热源开启4 min后打开冷却系统,共运行20 min;
4)工况四:热源开启5 min后打开冷却系统,共运行20 min。
3 实验结果及分析
图3、图4、图5、图6分别是工况一、工况二、工况三、工况四的温度记录曲线。
在图3中,穿通式模块表面温度(通道2、通道3)快速下降,这是因为模块整个安装在液氮入口冷板通道表面上,模块温度随着入口温度的急速下降而快速下降,而且通道2测点靠近冷板入口,通道3测点靠近冷板出口,通道2的温度明显低于通道3的温度。随着时间的推移,冷板入口温度继续下降,穿通式模块表面温度也继续下降,直至20 min时,穿通式模块表面温度最低降至0.8 ℃,并基本稳定。传导式模块表面温度(通道4、通道5、通道6)的变化趋势是先快速上升,第9 min时最高升至46.5 ℃,再缓慢下降,20 min后,基本稳定在44.9 ℃。靠近冷板出口的冷板表面温度(通道7)先缓慢上升,2min后,开始缓慢下降,20 min后,基本稳定在24.9 ℃,换热进入稳态。
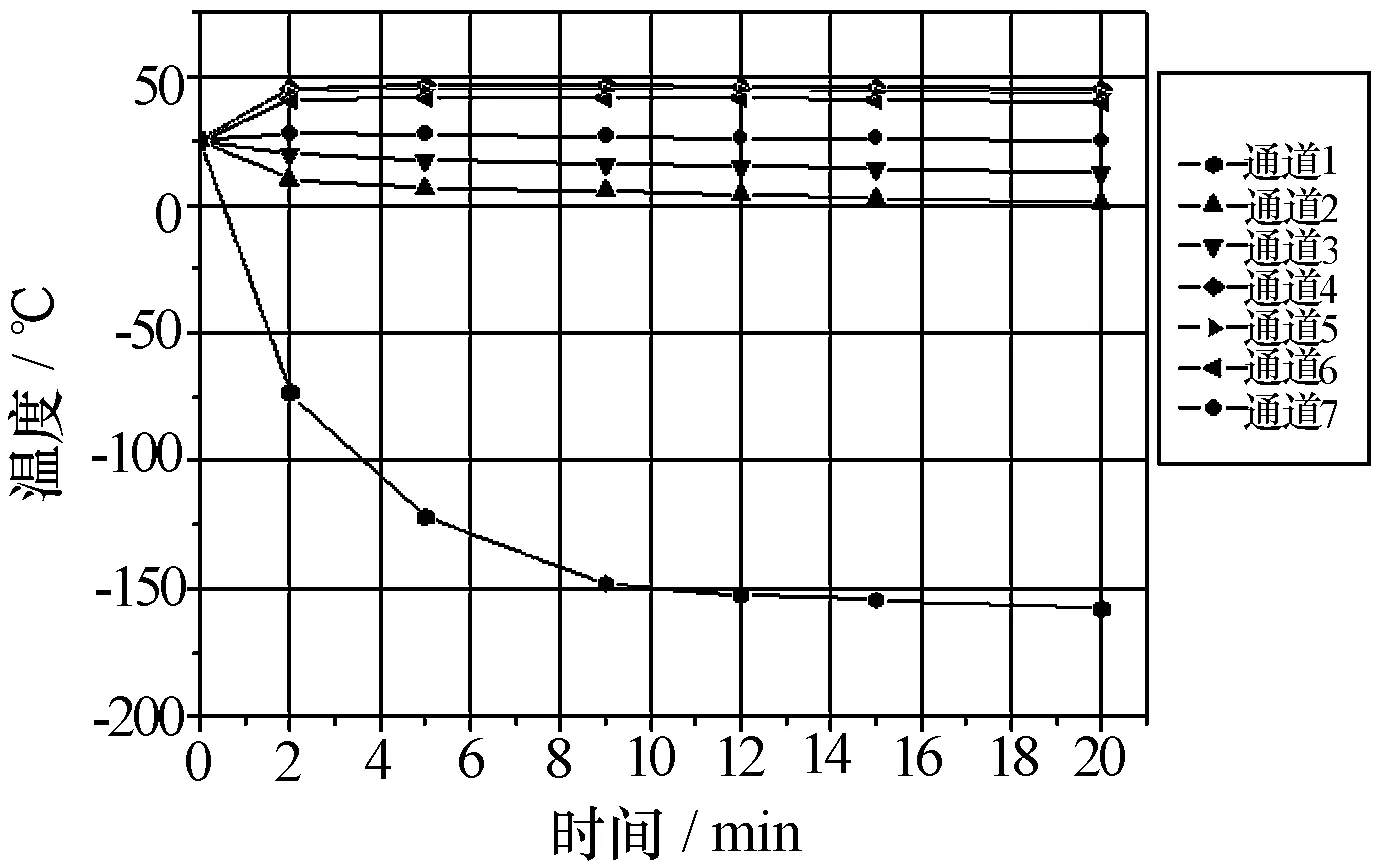
图3 工况一温度时间曲线
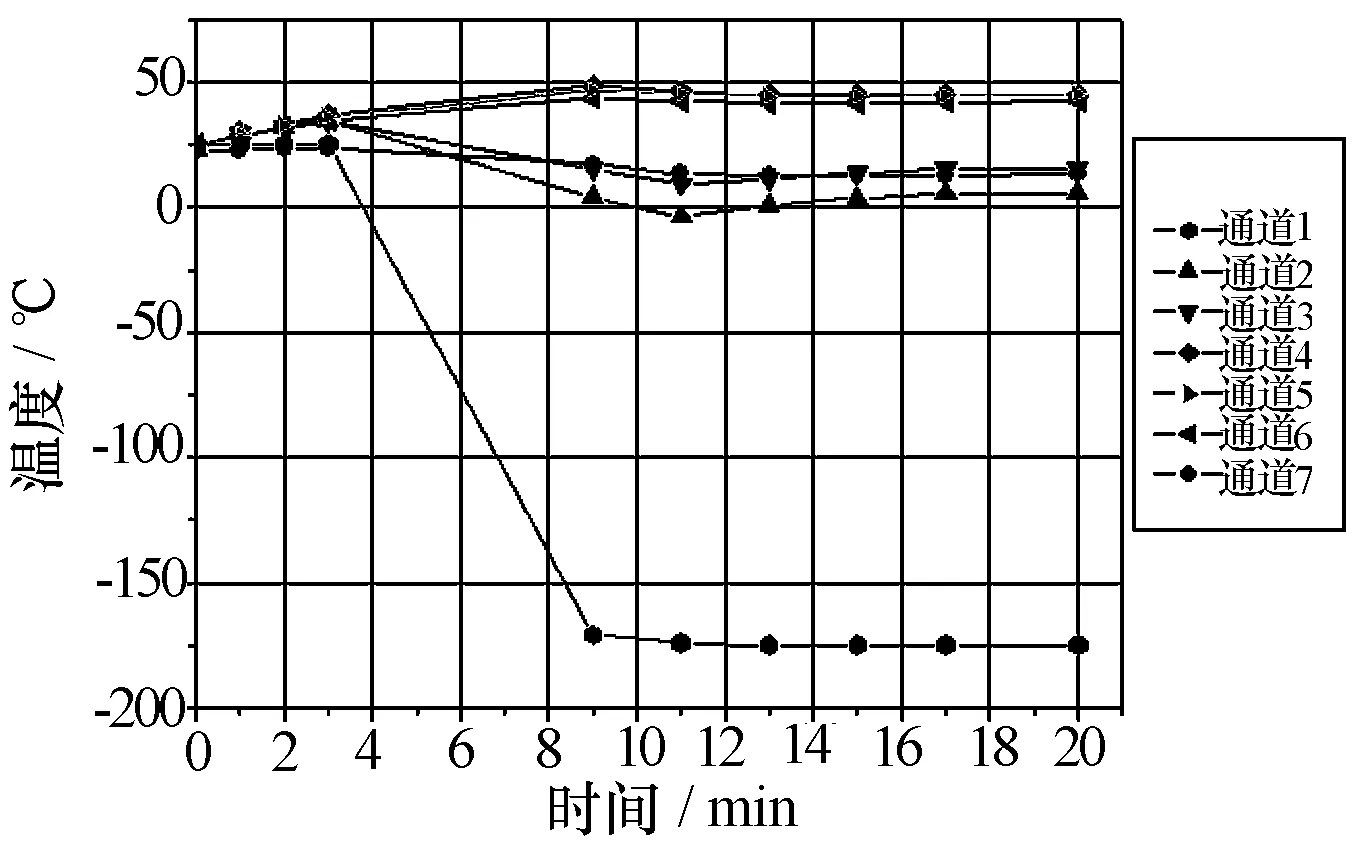
图4 工况二温度时间曲线
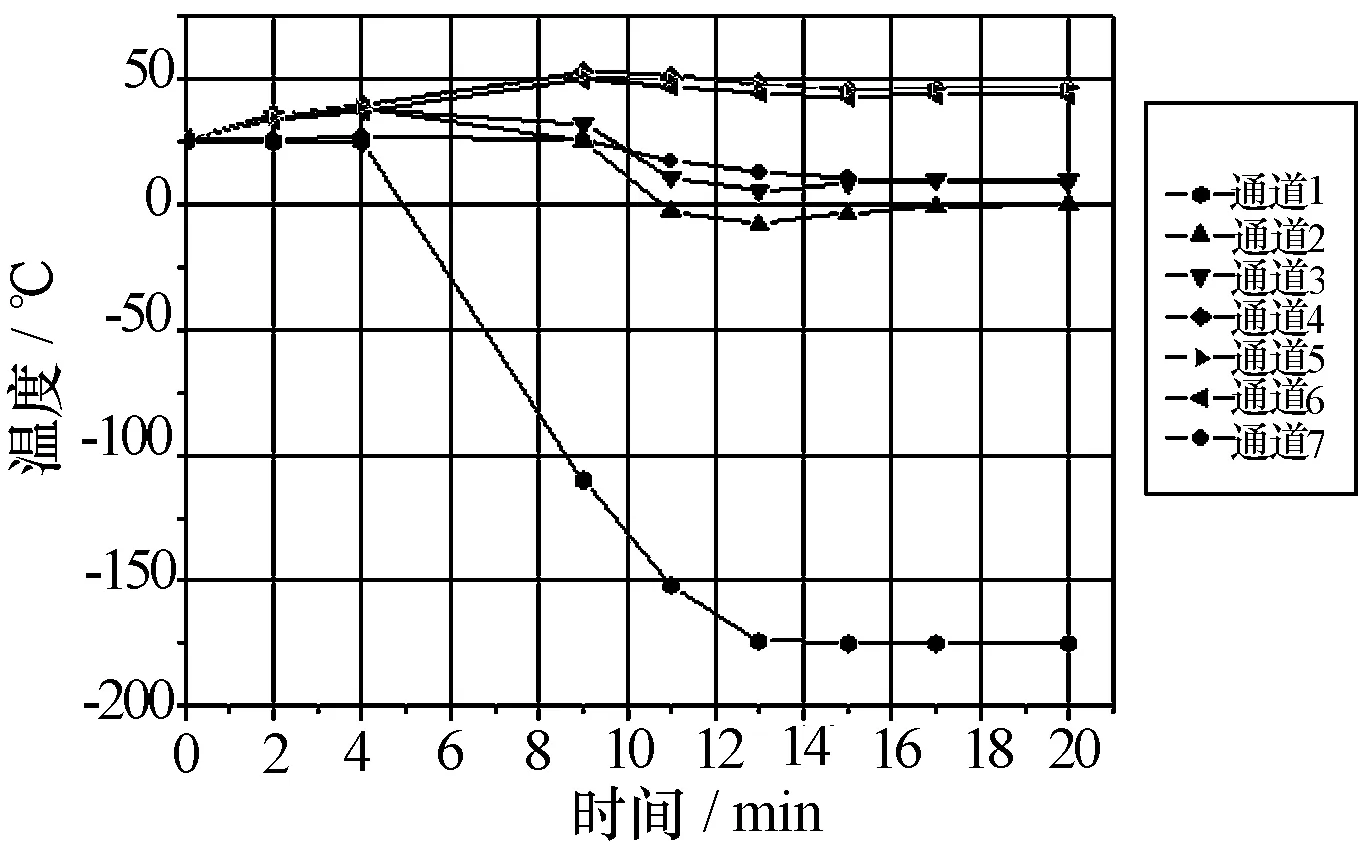
图5 工况三温度时间曲线
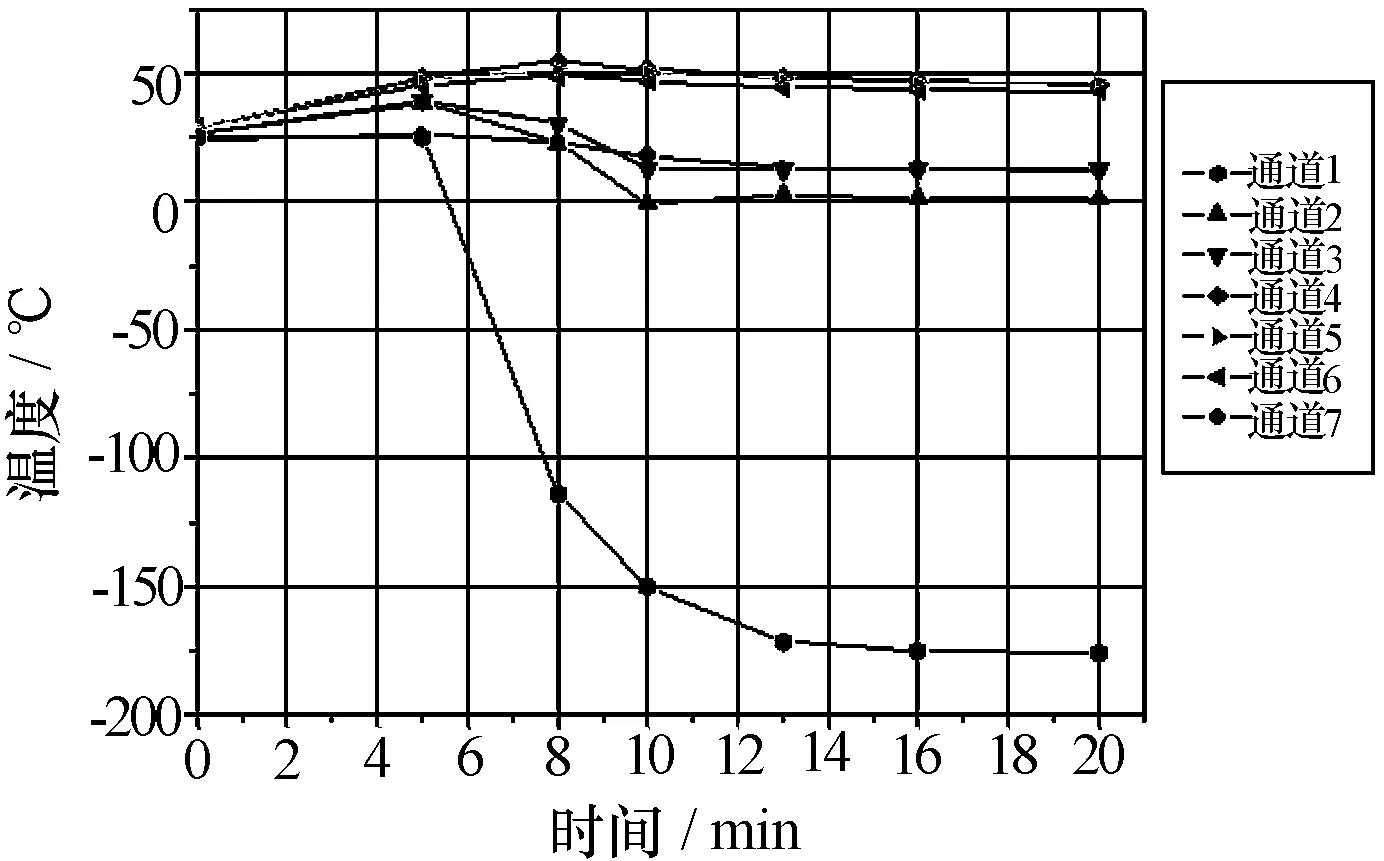
图6 工况四温度时间曲线
实验表明:2种安装形式的模块,表面温度差异很大,穿通式模块上的不同位置之间温度差异也较大,传导式模块上不同位置之间温度差异很小。这是因为气体的比热小,在冷板流道的不同位置,冷却气体本身的温度差异较大,因而模块上温差较大,而对于传导式的安装方式,对于同一模块,与冷板的接触面较小,因而模块上温差很小。传导式的安装方式,热流通路上的热阻比穿通式的要大,因而其表面温度比穿通式的大,温度相差约33 ℃。
从图4、图5和图6可以看出:尽管通电加热时间有差异,但是各模块冷板表面温度变化趋势是相同的,即前几分钟内,冷板表面温度显著上升,随着时间的推移,当冷板表面温度到达最高值后,开始缓慢下降。实验表明,开始通入液氮进行冷却后,冷板表面温度还是处于上升阶段,大约再上升12 ℃后,进入下降阶段。工况二冷板表面最高温度为48.5 ℃,工况三冷板表面最高温度为52.7 ℃,工况四冷板表面最高温度为54.3 ℃。发热电阻与冷板之间的接触温升为22 × 0.48 = 10.56 ℃,则工况四中,发热电阻壳温64.85 ℃,接近芯片允许壳温。根据本实验数据,为了减小液氮用量,可以先通电5 min后,再通入液氮,可以保证芯片工作在允许壳温下。
4 结束语
本文利用实验手段研究了某高空高速无人机载电子设备的冷却效果,根据机载常用电子设备的结构形式设计了实验单元,搭建了相应的实验系统,并进行了瞬态热模拟实验。实验结果表明:穿通式的安装方式优于传导式的安装方式,前者的表面温度低于后者33 ℃;该实验单元的热惯性可以保障电子设备在无冷却手段的条件下工作5min,因此,液氮可以在电子设备工作5 min后开启。
[1] 刘永绩,董素君,王佩广,等. 高空高速无人飞行器热控制系统设计[J].北京航空航天大学学报,2005(8): 834-838.
[2] 张芳, 王小群, 杜善义. 相变温控在电子设备上的应用研究[J]. 电子器件,2007(10):1939-1942.
[3] 范宇峰. 75米三相交流高温超导电缆冷却系统[J]. 低温物理学报,2005(11):1068-1072.
[4] 赵惇殳,谢德仁,苏翔,等. GJB/Z 27—1992 电子设备可靠性热设计手册[S]. 北京:国防科学技术工业委员会,1992.
[5] 邱成悌,赵惇殳,蒋全兴.电子设备结构设计原理[M].南京:东南大学出版社,2001.
[6] 杨世铭,陶文栓.传热学[M].北京:高等教育出版社,1998.
杨冬梅(1974-),女,高级工程师,主要从事机载雷达结构总体及热设计工作。
Thermal Design of HAHS(High-altitude and High-speed) UAV Airborne Electronic Equipment
YANG Dong-mei,WEI Tao
(NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China)
The thermal design of HAHS(High-altitude and High-speed) UAV airborne electronic equipment is studied in this paper. To solve the problem caused by shortage of cooling medium, a cooling method is put forward which combines structure thermal inertia and fluid nitrogen cooling. Based on this method, two cooling units are designed with different structures. After several experiments, the temperature distributions of theelectronic equipment at different cooling liquid supply are obtained, and how fluid nitrogen consumption affects unit temperature distribution is also analyzed. The experiment result shows that despite extreme lack of cooling medium, this cooling method can ensure that the airborne electronic equipment works within allowable temperature range. This design method can provide a useful reference for future similar thermal design.
UAV(unmanned aerial vehicle); liquid nitrogen; electronic equipment; thermal design
2013-03-13
TN305.94
A
1008-5300(2013)05-0013-03
