某型无人直升机悬停状态飞行动力学模型分析
2013-09-15裴少俊顾冬雷
裴少俊,刘 宝,顾冬雷
(南京模拟技术研究所,江苏南京 210016)
0 引言
无人直升机飞行动力学模型是飞行控制律设计的基础,对其进行深入分析才能全面理解被控对象的物理特性。直升机飞行动力学模型一般以时域状态空间方程或频域的传递函数形式描述,不能直观反映系统各部分的相互关系。将模型还原成系统结构框图形式可以清晰地描述出从操纵输入到产生状态响应的物理机制。
美国陆军的航空设计标准[1]“ADS-33E-PRF军用旋翼飞行器驾驶品质要求”(以下简称ADS-33)是当今直升机设计引用最多的品质规范,本文应用该标准针对无人直升机自身特性做适应性剪裁,从稳定性、中小幅值姿态变化响应和轴间耦合三方面评价某型无人直升机悬停状态下的飞行品质,以此指导飞行控制律的设计,充分利用原机品质好的特性,补偿品质差的特性,以实现控制性能的优化。
1 数学模型
本文以某单旋翼带尾桨常规布局轻型无人直升机[5]为研究对象,旋翼为跷跷板结构,高置平尾,垂尾后掠布局。其悬停状态线性小扰动方程如式(1)。
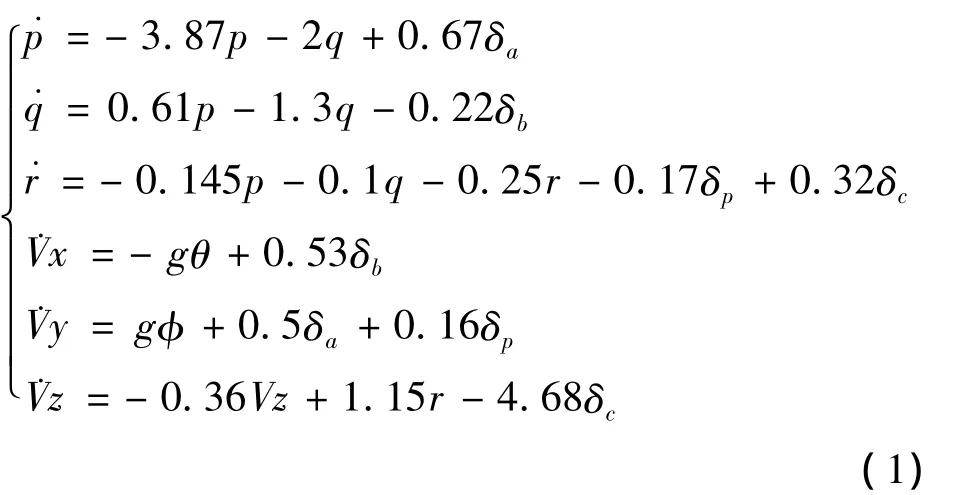
其中,g≈32.1ft/rad.s,状态[φ θ vxvyvzp q r]分别表示滚转角、俯仰角、前向速度、侧向速度、垂向速度、滚转角速度、俯仰角速度、偏航角速度。控制输入变量[δbδaδcδp]分别表示纵向、横向、总距和尾桨变距输入。
该模型和试飞数据的时域贴合度达75%以上[5],可用于飞行动力学特性分析和飞行控制律设计。
2 模型飞行原理分析
为了直观把握系统中各个部分的相互关系,将式(1)按照纵横向分解方法[3]还原成系统结构框图的形式分别加以分析。
图1给出了纵垂向结构框图。纵向周期变距δb变化引起旋翼锥度角前后变化,旋翼拉力倾斜一方面通过力的导数直接产生纵向加速度变化,另一方面通过主操纵导数引起机身俯仰角速度变化,从而引起俯仰角低头或抬头的反应,姿态的改变通过气动导数引起纵向加速度,进而引起前向速度的变化。总距的增加使旋翼产生的升力增加,产生向上的加速度,通过自身阻尼系数最终产生垂速变化。悬停时纵垂向耦合比较简单,俯仰姿态角Δθ变化引起垂速变化,其他耦合效应可忽略。
图2给出了横航向结构框图。横向周期变距δa变化引起旋翼挥舞锥度角左右变化,旋翼拉力倾斜产生侧向力,一方面通过力的导数直接产生横向加速度变化,另一方面通过主操纵导数引起机身滚转角速度变化,从而引起滚转角姿态的改变,再通过气动导数引起侧向加速度,进而引起侧向速度的变化。偏航通道操纵尾桨距变化,产生机身偏航力矩变化,再通过力矩系数引发偏航角加速度变化,通过机身阻尼形成偏航角速度变化。
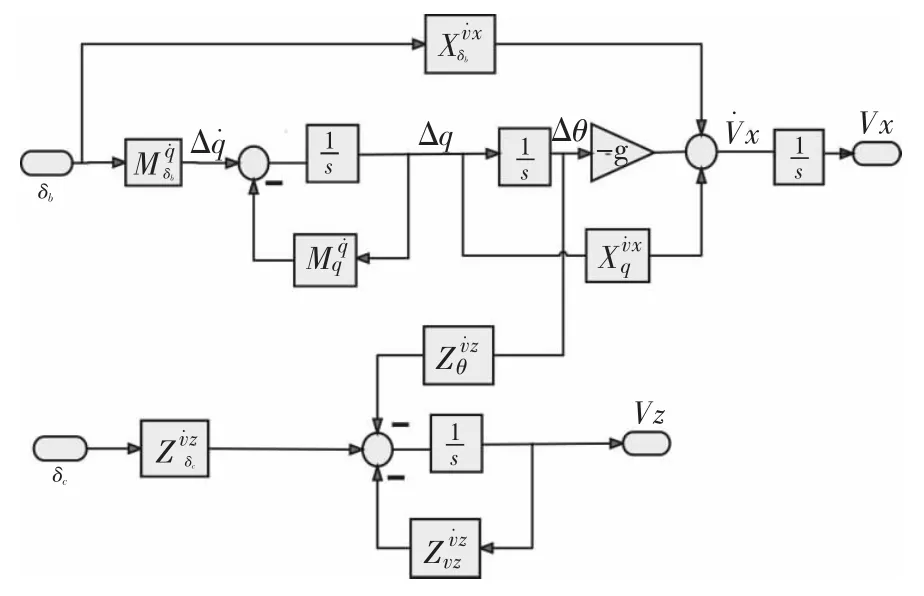
图1 模型纵垂向结构框图

图2 模型横航向结构框图
3 飞行品质分析
由于该型无人直升机无大机动飞行任务要求,因此对ADS-33规范进行裁剪,从稳定性、中小幅值操纵响应和轴间耦合特性几个方面分析该型机的飞行品质等级。
3.1 稳定性分析
图3和图4为悬停时俯仰和滚转振荡运动稳定性等级指标。图中菱形为开环特征值指标,五角星为闭环指标(后续各图同)。
由图3、图4可知,开环特性长周期俯仰振荡发散时的等级 1 边界 ξ=-0.2,ωnmax=0.51rad/s。对于该型机悬停纵向长周期特征值阻尼ξ=-0.156,自然频率ωn=0.37rad/s,符合等级1标准,说明当俯仰振荡运动周期较长时,即使出现负阻尼也可将操纵性定为等级1;悬停时荷兰滚模态的振荡频率ωn=0.357rad/s,虽然阻尼 ξ=0.21 较小,但仍然处于等级1。
3.2 中小幅值姿态变化响应
小幅值/高频的姿态变化,多用于精确的直升机轨迹调整操纵,ADS-33中以频域指标带宽和相位滞后来衡量。这里针对无人直升机的飞行任务特性选用目标捕获及跟踪科目评估悬停状态的小幅值三轴姿态角的变化响应等级[4]。
图5为纵横向和航向小幅值响应等级图。由开环特性可知该直升机平台本体特性:悬停状态的纵向带宽位于等级2范围内,说明纵向俯仰角有较好的操纵响应品质,纵向通道有较好的跟随性和灵敏度,但纵向带宽偏小;横向带宽位于等级1范围,说明了该型机悬停低速状态下横向操纵时滚转角有较好的操纵响应品质,横向通道有较好的跟随性和灵敏度;航向带宽位于等级3范围内,说明了航向小幅值操纵偏航角响应品质较差,航向带宽严重不足。
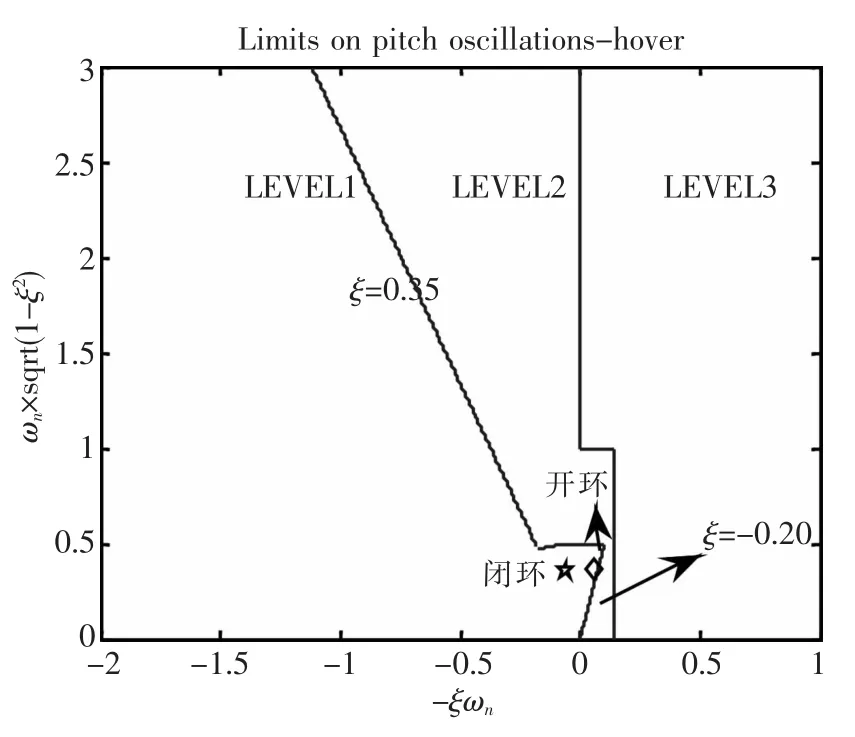
图3 悬停时俯仰振荡开环、闭环稳定性等级
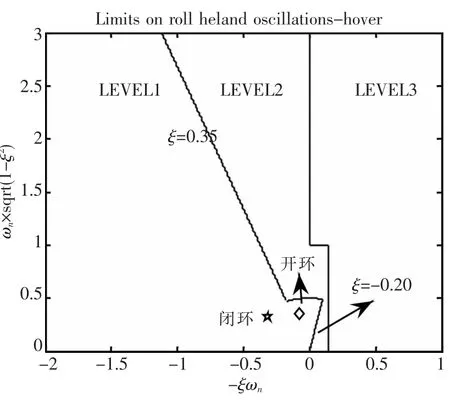
图4 悬停时荷兰滚模态开环、闭环稳定性等级
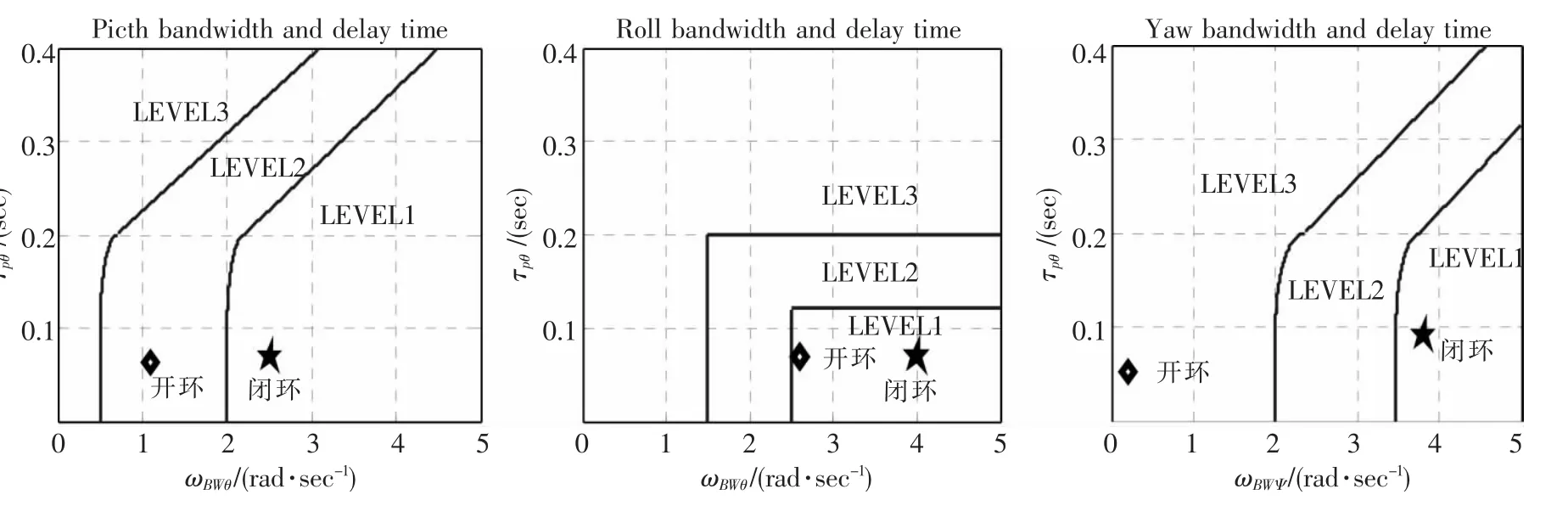
图5 悬停状态纵向、横向和航向小幅值操纵开环和闭环等级对比
中幅/中低频的姿态变化多用于地形规避和跟踪飞行时的操纵,体现迅速改变姿态能力的要求,ADS-33以快捷性指标来衡量[4]。
图6分别给出了悬停状态下纵向、横向和航向中幅值姿态变化响应的快捷性等级要求,按照该图的等级划分标准,该型机悬停时纵向快捷性为等级2水平,说明纵向运动性能较好。横向滚转姿态响应的快捷性指标都为等级1,说明横向滚转姿态的机动性很强。航向快捷性等级处于等级3的水平,说明航向快捷性能较差。
3.3 轴间耦合
轴间耦合使直升机的运动复杂化,是损害其飞行品质的主要因素之一。这里从总距与偏航耦合和纵横向操纵耦合角度分析该型机的耦合等级水平。
总距与偏航耦合开环等级如图7所示,位于等级2以外水平,可见悬停状态总距操纵引起偏航耦合因素较大,表明该型机开环状态下垂向机动时航向保持功能较差。
由于无人直升机一般工作在目标捕获和跟踪模式下,我们选用此标准下的滚转引起的俯仰和俯仰
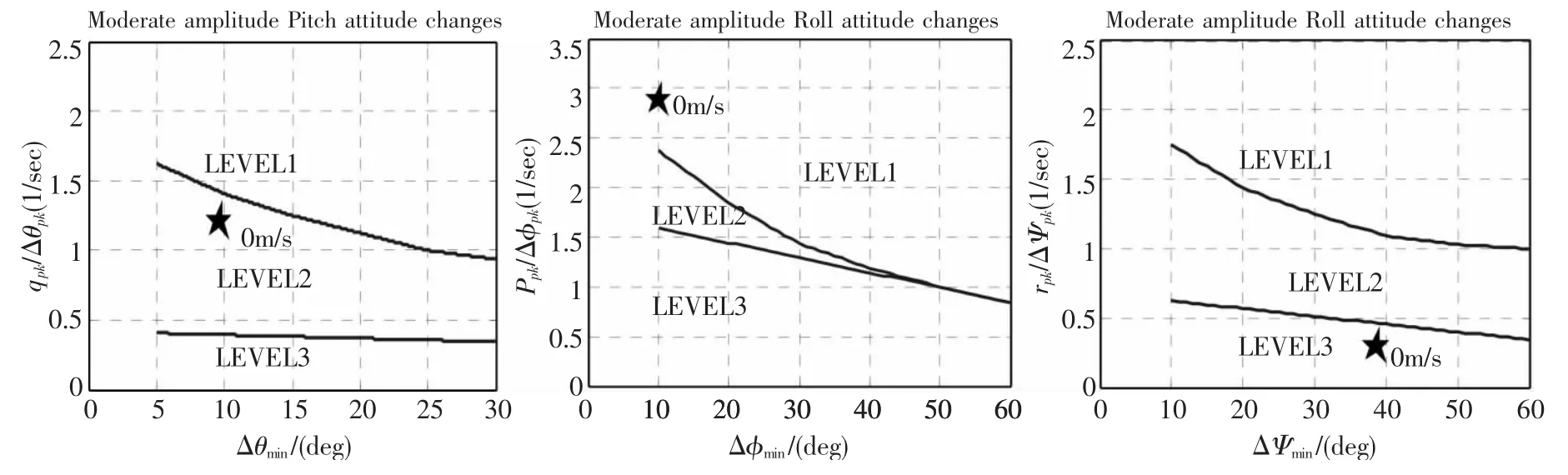
图6 纵向、横向和航向操纵响应的快捷性等级指标
引起的滚转耦合判断纵横向操纵耦合性,如图8所示的开环耦合特性位于等级2水平,说明纵横向操纵存在一定的耦合性,从图中看主要是纵向操纵引起滚转角速度响应较大。

图7 总距操纵引起偏航耦合等级
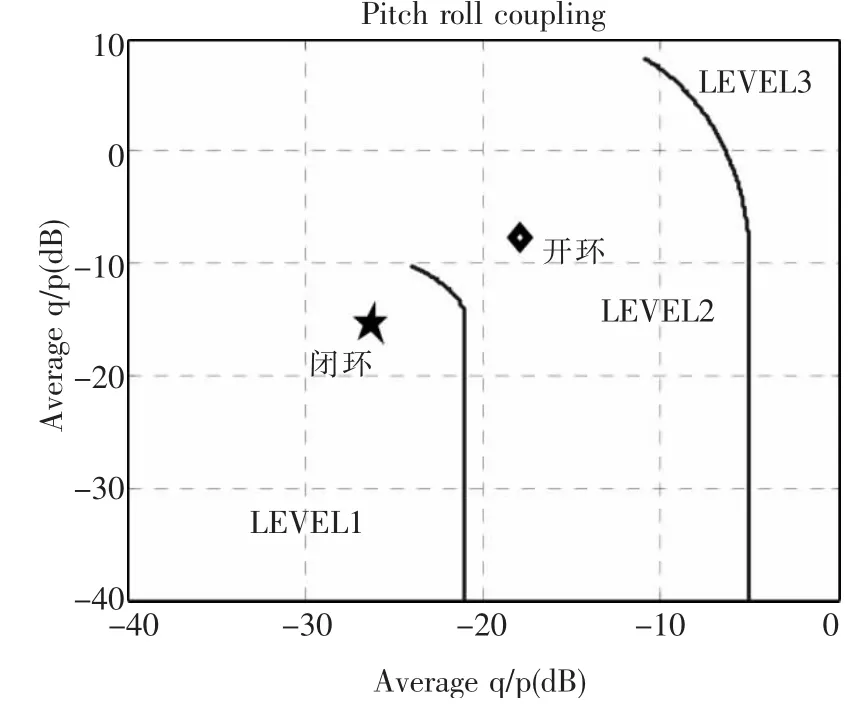
图8 纵横向滚转与俯仰间操纵耦合
通过对稳定性、中小幅值操纵姿态响应与轴间耦合开环自然特性分析可知:该型无人直升机悬停状态纵横向稳定性能较好,不足是阻尼过小;纵横向小幅值操纵性较好,延迟时间小,但纵向带宽不够;中幅值操纵纵横向快捷性良好;航向通道操纵性较差,小幅值操纵带宽过小,中幅值操纵偏航响应过慢;总距与偏航耦合较严重,纵横向操纵时异轴耦合响应较明显。
4 控制律优化设计目标
无人直升机的飞行控制律设计,对设计结果应该给出明确的评判标准。本文应用ADS-33品质规范对控制律设计提出目标优化要求。该型机自身稳定性较好但阻尼不足,这就要求控制律设计时增加阻尼,并使其稳定性保持在等级1水平以增强抗干扰能力;由于该机主要飞行任务对跟随性能要求很高,设计时必须保证带宽和相位滞后指标保持在等级1水平;主要飞行任务对中幅值姿态变化响应的快捷性指标无具体要求,该指标可放宽到等级2水平。操纵响应的轴间耦合使操纵复杂化,控制律设计时需改善操纵性使之达到等级1水平。下面给出具体设计要求和加入飞控系统闭环后整机品质的特性分析。
从稳定性等级分析看:悬停时纵向稳定性等级较高,但长周期仍然是振荡发散的,这就需要设计其闭环特征值位于虚轴左半平面,使其能闭环稳定并保证其稳定性等级水平。横向荷兰滚模态阻尼偏小,需要引入滚转角速度反馈来提高其阻尼。通过设计,增大纵横向阻尼,进一步提高系统稳定性,闭环后稳定性等级达到如图3和图4的五角星指标所示的1级水平。
从小幅值姿态变化响应等级分析看:纵向带宽不足制约着其抗扰动能力,需要改善其带宽以提高系统稳定裕度。横侧向操纵品质较好,但带宽靠近等级1边界,可适当增加其带宽。横向快捷性能均达到1级水平,这要求在闭环时保留该特性。航向通道操纵性能最差,带宽过窄和偏航角响应过慢都需要加以改善,通过引入角速度阻尼等方法,在不增加系统延迟时间的基础上增加系统带宽。通过设计,闭环后三个主通道的带宽和延迟时间均达到如图5的五角星指标所示等级1水平。
从轴间耦合看:总距引起偏航耦合较严重,可引入总距到尾桨补偿关系的前馈项,改善后的效果已达到如图7的五角星指标所示等级1水平;纵横向轴间耦合为2级水平需要改善,控制上采用解耦方法设计后,闭环耦合等级降低到如图8的五角星指标所示等级1水平。
应用ADS-33规范指导设计后,改善了无人直升机操纵品质差的特性,保留了原机品质好的特性,使整机闭环后稳定性、小幅值姿态变化响应与轴间耦合特性等主要飞行品质均达到等级1水平。
5 结束语
本文应用模型结构框图分解方法分析了某型无人直升机从操纵输入到状态响应的原理机制,应用ADS-33规范分析了稳定性、中小幅值姿态变化响应与轴间耦合特性。从分析结果看:该型机悬停状态纵横向操纵性较好,航向通道动态特性较差,总距与偏航耦合较严重。应用ADS-33规范对原机品质差的特性提出控制优化目标要求,使整机控制闭环主要飞行品质达到等级1水平。
上述方法进行模型分析与控制律设计评价,在某型无人直升机项目研制过程中得到实际应用,取得了良好的效果。
[1]Aeronautical design standard performance specification,handling qualities requirements for military rotorcraft[S].United States Army Aviation and Missile Command,ADS-33E-PRF,2000.
[2]高 正,陈仁良.直升机飞行力学[M].北京:科学出版社,2003.
[3]杨一栋.直升机飞行控制[M].北京:国防工业出版社,2007.
[4]孙传伟,黄一敏,高正.直升机飞行品质评估数学模型研究[J].飞行力学,2001,19(1):10-12.
[5]刘 宝,顾冬雷.某型无人直升机模型校验报告[R].南京:南京模拟技术研究所,2010.