直升机气动布局参数对飞行性能的推荐域分析
2013-09-15邱良军吴希明徐玉貌
邱良军,吴希明,徐玉貌
(中航工业直升机设计研究所,江西景德镇 333001)
0 引言
直升机气动布局参数主要包括平尾的水平位置、安装角和面积,短翼的安装角和面积,旋翼轴的高度和前倾角等。这些气动布局参数对直升机的飞行性能有着显著的影响。但在工程实际中,直升机的气动布局参数设计往往还要考虑飞行品质、桨毂力矩、尺寸限制和结构限制等条件,飞行性能并不是对这些参数的唯一约束,最佳性能对应的气动布局参数组合不一定能够满足其它的限制条件,甚至会是不可行的气动布局参数组合,所以以求解最佳性能对应气动布局参数组合为目标的传统优化方法并不完全适用于实际设计。本文提出一种使用多目标粒子群优化方法求解直升机气动布局参数推荐域的方法,根据指标要求或者原准机型得到一组可以接受的飞行性能目标,求解直升机气动布局参数的推荐域,使得推荐域内气动布局参数组合的对应飞行性能不低于飞行性能目标。在后续的气动布局参数综合优化设计中就可以使用这一推荐域约束引导气动布局参数设计,保证综合设计结果的飞行性能不低于预期。
粒子群优化算法(Particle swarm optimization,PSO)是由Kennedy和Eberhart于1995年提出的一种基于群体智能的随机优化算法,通过群体中微粒间的合作与竞争而产生的群体智能指导优化搜索,具有在全局变量空间中寻找最优点的特点。应用PSO求解多目标优化问题的关键在于合理选择全局最优解和历史最优解,以引导粒子的飞行,满足算法在Pareto前沿的收敛性和分布性[1]。
本文首先通过动态计算粒子间的距离和拥挤度来维护外部集,引导粒子向推荐域边界解最稀疏的变量空间飞行,给出使用多目标粒子群优化算法求解气动布局参数推荐域的方法,然后使用该方法对算例直升机气动布局参数进行求解,给出其对飞行性能的推荐域解集,证明该方法的有效性,并总结气动布局参数推荐域边界的主要规律。
1 多目标粒子群优化算法求解推荐域的流程
1.1 基础粒子群优化算法
粒子群算法是对鸟群觅食过程的迁移和群集的模拟,采用速度-位移模型,将群体中的每个个体看作是在N维变量空间中没有体积的粒子,在变量空间中以一定的速度飞行,搜索空间中的最优点。每个个体的速度根据它本身的飞行经验和同伴的飞行经验动态调整。第i个微粒表示为Xi=(xi1xi2…xiN),它经历过的最优位置(历史最优值)记为Pi=(pi1pi2… piN),也被称为Pbest。在群体所有粒子经历过的最优位置则称为Gbest,记为Gi=(gi1gi2… giN)。粒子i的飞行速度表示为Vi=(vi1vi2…viN)。对于每次迭代,粒子i在n+1次迭代的速度和位置根据下式更新:

其中w为惯性权重系数,一般取0.8;c1和c2是权重因子,为0到1之间的随机数[2]。
1.2 推荐域的概念
对于直升机气动布局参数对飞行性能的推荐域,一般可以表达为下面的形式:
1)给定 n个气动布局参数 x=[x1x2…xN]T,有m个飞行性能目标,并且这m个飞行性能对气动布局参数的要求有可能是互相冲突的,飞行性能集合可以表达为向量f(x)=[f1(x)f2(x) …fm(x)]T,根据设计要求或者原型机数据,确定可以接受的飞行性能目标值,表达为g0=[g1g2…gm]T。由此可以定义,对于∀i,1≤i≤m,满足 fi(x)>gi的气动布局参数向量x为推荐解,由推荐解组成的气动布局参数空间称为气动布局参数的推荐域[3]。
2)对推荐域的求解主要就是求解出推荐域的边界,也就是求解所有气动布局参数向量x,使得对于∀i,1≤i≤m,满足 fi(x)=gi,为了进行数值求解,将条件改写,其中ε为预设的小量。
3)为了衡量当前飞行性能f(x)到g0的距离,也称多目标适应度,定义 Fitness(x)=max,当|Fitness(x)|<ε时,x为推荐域边界解。
4)由于需要求解全部的气动布局参数边界解x,推荐域边界是连续的,而粒子的数量是有限的,为了使得求解的粒子在推荐域边界上均匀分布,需要定义粒子之间的距离,定义粒子j和粒子k间的距离
5)对于所有相互之间距离小于预定阈值R的粒子,定义最优粒子为Swarmbest,∀粒子Swarmi,当distancebest,i< R 时,满足 Fitnessbest< Fitnessi。
6)最优粒子Swarmbest为半径R内的非支配粒子(此粒子支配半径内其它的非最优粒子),所有最优粒子Swarmbest组成的集合为非支配集,对每次迭代得到的粒子群有一个当次迭代的非支配集,所有迭代的非支配集的组合为外部集,也就是最终求解得到的近似推荐域边界。
7)各粒子的个体极值Pbest,粒子群中的每个粒子都有一个自己的个体极值,对已经进行多次迭代的第k个粒子,记录每次迭代的多目标适应度,得到多个多目标适应度,取其中最小的多目标适应度对应的气动布局参数为第k个粒子的个体极值Xk,Pbest。
8)全局最优值Gbest定义为外部集中周围非支配粒子分布最稀疏的粒子。
1.3 推荐域求解流程
使用多目标粒子群优化算法求解推荐域的流程如下:
1)初始化粒子群,由统计数据或者参数边界定义出气动布局参数推荐域的参数空间边界,在参数空间内随机生成粒子位置X,并将局部最优解Pbest和全局最优解Gbest暂时定义为粒子的初始位置;
2)根据粒子群算法更新粒子的速度和位置,对于超出搜索边界的粒子在参数空间内随机重新生成;
3)计算各个粒子的飞行性能集合向量f(x)和多目标适应度Fitness(x);
4)求解当前粒子群中的非支配集;
5)将当前粒子群的非支配集合放入外部集中,按非支配集定义更新外部集;
6)以多目标适应度Fitness(x)更新各个粒子的个体极值Pbest;
7)计算外部集中各粒子间的距离,更新全局最优值Gbest;
8)随着迭代推进,逐步减小惯性权重w和推荐域边界解阈值ε;
9)转至2),按粒子群算法更新粒子群,直到达到迭代次数限制,完成迭代后将外部集输出为气动布局参数在参数空间内的推荐域边界。
其流程图见图1。
2 算例直升机的气动布局参数推荐域求解
直升机的基本性能主要可以分为垂直性能、续航性能和最大速度性能三大块。垂直性能主要包括悬停升限、最大悬停重量和最大垂直爬升速度等,直升机处于垂直飞行状态,对气动布局参数的要求相似;续航性能主要包括最大航程和航时,直升机处于中等飞行速度状态,对气动布局参数的要求相似;最大速度性能主要为最大平飞速度,直升机处于大速度平飞状态。下面使用算例直升机的性能作为目标性能,采用粒子群算法对主旋翼轴、短翼和水平尾翼分别求解垂直性能、续航性能和最大速度性能的推荐域边界。
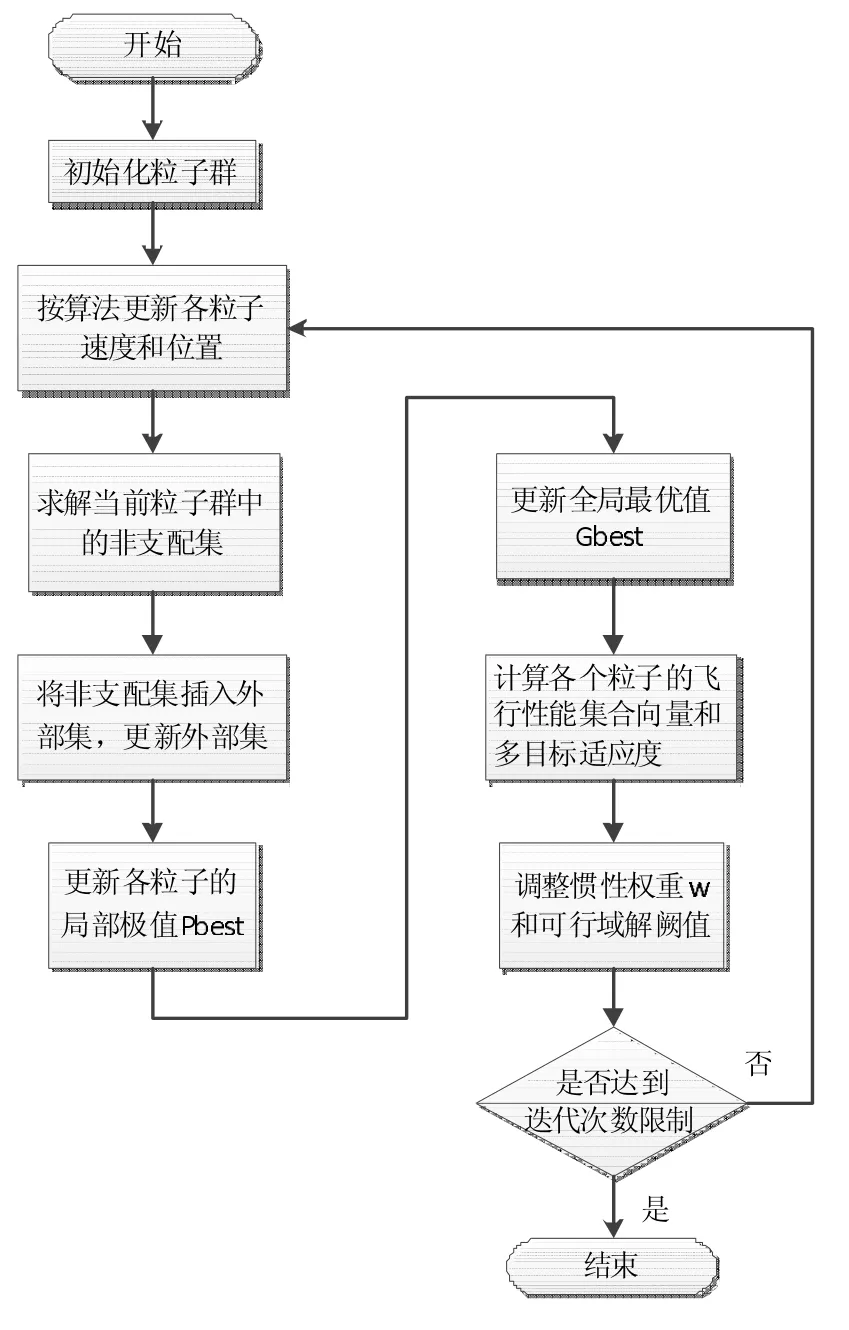
图1 推荐域求解流程图
2.1 主旋翼轴参数推荐域边界
主旋翼轴参数的主要参数为主旋翼轴高度和主旋翼轴前倾角。固定其它气动布局参数,求得垂直性能、续航性能和最大速度性能的推荐域边界如图2。
对旋翼轴参数的推荐域边界进行总结,可以得到推荐域边界一般规律的示意图如图3。
旋翼轴参数推荐域边界一般规律为:
1号区域是垂直性能的推荐域:虚线往右为垂直性能的推荐域;旋翼轴前倾角对垂直性能影响不大;降低旋翼高度会显著增加机身的下洗增重效应,降低直升机的垂直性能。
2号区域是续航性能的推荐域:虚线左侧为续航性能的推荐域;合适的旋翼轴前倾角能够减小最小需用功率速度点的旋翼配平操纵和机身俯仰角,进而提高续航性能;旋翼轴高度对直升机的配平俯仰角有影响,并且增大直升机的前飞阻力,降低续航性能。
3号区域是最大巡航速度的推荐域:虚线左侧大,对最大巡航速度产生不利影响。
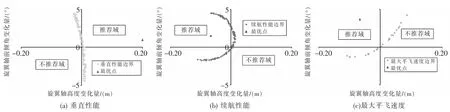
图2 旋翼轴参数推荐域边界
实线为旋翼轴参数的其它限制:旋翼轴前倾角不能过大,以控制悬停配平时的机身俯仰角和桨毂力矩;旋翼轴高度不能过低,以容纳所需安装的主减速器、自动倾斜器等设备。
4号区域是推荐域的交集:区域为最终推荐域;垂直性能希望增大旋翼轴高度与平飞续航性能减小高度的要求相矛盾,旋翼轴前倾角对垂直性能影响较小,主要受到续航性能和最大速度性能的约束。
2.2 短翼参数推荐域边界
为续航性能的推荐域;旋翼前倾角越大,最大巡航速度时的机身俯仰角越小,所需的配平操纵量也小,提高了最大巡航速度;旋翼轴高度越高,机身阻力越短翼参数的主要参数为短翼面积和短翼安装角,固定其它气动布局参数,求得垂直性能、续航性能和最大速度性能的推荐域边界如图4。
对短翼参数的推荐域边界进行总结,可以得到推荐域边界一般规律的示意图如图5。
短翼参数推荐域边界一般规律为:
1号区域是垂直性能的推荐域:虚线往左为垂直性能的推荐域;短翼安装角对垂直性能影响不大;增大短翼面积会增加机身的下洗增重效应,降低直升机的垂直性能。
2号区域是续航性能的推荐域:虚线左侧为续航性能的推荐域;过大的短翼安装角和过大的短翼面积会导致短翼失速和阻力增大,影响续航性能。
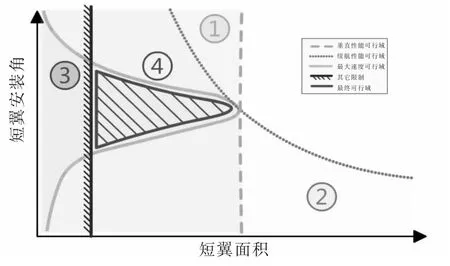
图5 旋翼轴参数推荐域示意图
3号区域是最大巡航速度的推荐域:虚线左侧为最大速度性能的推荐域;短翼安装角过大,导致短翼失速,短翼安装角过小,则影响短翼升力;短翼面积过大,则增大短翼阻力,并且短翼为旋翼卸载过多,旋翼桨盘平面前倾加大导致需用功率增大,影响最大巡航速度性能。
实线为短翼参数的其它限制:短翼面积需要足够大,以容纳所需挂载的设备。
4号区域是推荐域的交集:区域为最终推荐域;垂直性能和短翼挂载要求限制了短翼面积的选择,存在一个最佳短翼安装角,在满足各性能指标要求的前提下获得最大的短翼面积,以挂载更多的翼下设备。
2.3 水平尾翼参数推荐域边界
水平尾翼参数的主要参数为水平尾翼面积和水平尾翼安装角,固定其它气动布局参数,求得垂直性能、续航性能和最大速度性能的推荐域边界如图6。
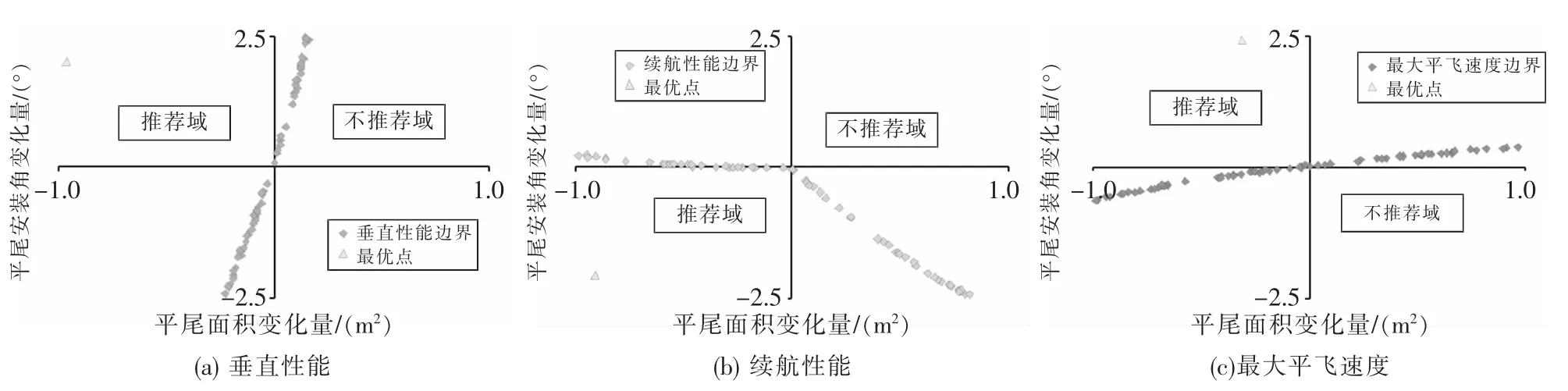
图6 水平尾翼参数推荐域边界
对水平尾翼参数的推荐域边界进行总结,可以得到推荐域边界一般规律的示意图如图7。
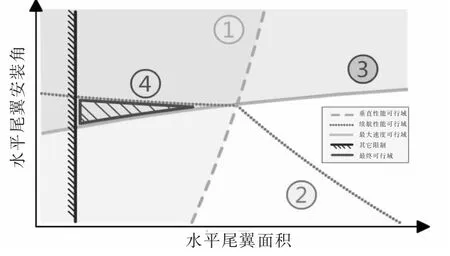
图7 水平尾翼参数推荐域示意图
水平尾翼参数推荐域边界一般规律为:
1号区域是垂直性能的推荐域:虚线往左为垂直性能的推荐域;平尾安装角对垂直性能影响不大;增大平尾面积会增加机身的下洗增重效应,降低直升机的垂直性能。
2号区域是续航性能的推荐域:虚线下侧为续航性能的推荐域;过大的平尾安装角和过大的平尾面积会导致中等平飞速度下过大的俯仰角,影响平飞阻力,降低续航性能。同时航程和航时对平尾参数的要求又有所不同,在边界上产生了一个拐点,左侧为航程边界,右侧为航时边界。
3号区域是最大巡航速度的推荐域:虚线左侧为最大速度性能的推荐域;大速度平飞由平尾提供抬头力矩,以减小平飞俯仰角度、旋翼操纵量和飞行阻力,所以需要较大的平尾面积和平尾安装角。
实线为平尾参数的其它限制:平尾需要有足够大的面积以保证直升机的平飞俯仰操稳特性。
4号区域是推荐域的交集:区域为最终推荐域;续航性能和最大平飞性能对平尾参数的要求有所矛盾,它们的交集限制了平尾参数的选择。存在一个平尾安装角,在不影响各性能指标的前提下使得平尾面积最大,以提高飞行品质。
3 结论
由前面的论述和计算结果可以看出:
1)本文提出的多目标粒子群优化方法可以有效地求解气动布局参数对飞行性能的推荐域,求解结果的粒子在边界上分布均匀,近似精度满足工程要求。本方法同样适用于旋翼参数的推荐域求解与优化设计。
2)对垂直、续航和最大速度性能的优化计算,表明不存在一个气动布局参数组合同时使三者都达到最优,它们对气动布局参数的要求是存在矛盾的,需要使用多目标优化方法来进行气动布局参数选择。
3)本文求解出了算例直升机气动布局参数对飞行性能的推荐域,并以此总结了直升机气动布局参数推荐域的一般规律,可用于指导型号参数选择和优化设计。
出版社,2004.
[1]玄光男.遗传算法与工程优化[M].北京:清华大学
[2]张敏慧.改进的粒子群计算智能算法及其多目标优化的应用研究[D].杭州:浙江大学,2005.
[3]朱建才.多目标优化方法库的开发与应用研究[D].西安:西北工业大学.2006.