基于Hu不变矩的红外图像电力设备识别*
2013-09-13陈俊佑金立军段绍辉姚森敬
陈俊佑,金立军*,段绍辉,姚森敬,赵 灵
(1.同济大学 电子与信息工程学院,上海 201804; 2.深圳供电局有限公司,广东 深圳 518010)
0 引 言
随着社会的发展,电力需求越来越大,电力设备的负荷也不断增加,由于电力设备大多位于室外,在长期的风雨侵袭下,不免会产生损坏而引起电力系统故障。热缺陷是由于设备损坏产生的局部过热,是电力故障中最常见的一种,热缺陷危害着电力系统的安全运行,若不能被及时发现,可能导致严重的电力事故,造成极大的经济损失。随着红外热成像诊断技术的普及,其在电力系统在线故障监测方面发挥的作用也越来越重要[1-3]。电力设备种类繁多,不同设备能承受的温度也有较大差别,因此对电力设备进行分割识别是红外诊断技术中一个重要环节。红外图像目标的特征提取是识别中的关键步骤,目前常用的特征提取方法有角点检测、Hough直线检测、边缘检测、不变矩等。
本研究提取的对象为红外分割图像中的电力设备,其在拍摄过程中最易受拍摄角度、距离等的影响,而不变矩具有旋转、平移、缩放等不变性,因此本研究选择不变矩特征作为特征提取对象。
1 区域生长法图像分割
图像分割即将一幅图像分割成不同的区域,同一区域内图像性质相同或相似。对于电力设备红外热图,其目标与背景温度有较大差异,在图像中表现为颜色与亮度的不同,研究者可根据这一特性将设备从背景中提取出来以做进一步的分析[4]。
1.1 种子点的选取
在红外图像中,电力设备的温度通常要比背景温度高,设备中故障点的温度也会明显高于其他部位。因此,研究者可选取图像中温度最高处(即灰度图像中灰度值最大)的点作为种子点,根据种子生长准则获得该点所处的电力设备图像,进而对该设备做进一步识别与故障判定。
1.2 种子生长准则
种子点选好之后,要按照一定的准则生长出该种子点所在的电力设备图像。本研究选用一个先进先出的队列,遍历从起始点开始生长建立起来的树。首先,给图像中每个点标记两个标签m、n。m用来判断是否已生长,m=1表示已生长,m=0表示还未生长;n用来判断该点是否为边缘,n=1表示是边缘,n=0表示不是边缘。然后,笔者建立一个空的队列,将选取好的种子点加入队列。
具体的种子生长流程如图1所示。
本研究按照以上流程对一幅图像进行处理,直至队列为空,表明已经没有点满足生长要求。此时,系统扫描整幅图像中的所有像素点,m=1的点即为目标区域内,n=1的点则处于目标边缘,由此可获得整个目标区域的二值图像。
1.3 生长判决条件
上述生长方式中,生长条件决定着一个点能否进入队列成为目标点,因此生长条件的选择至关重要,本研究选择灰度相似性判决方法[5-6]作为图像点的生长条件。
设已分割区域像素点灰度均值为x,待测像素点灰度值为y,则待测点与已分割区域像素点相似性为:
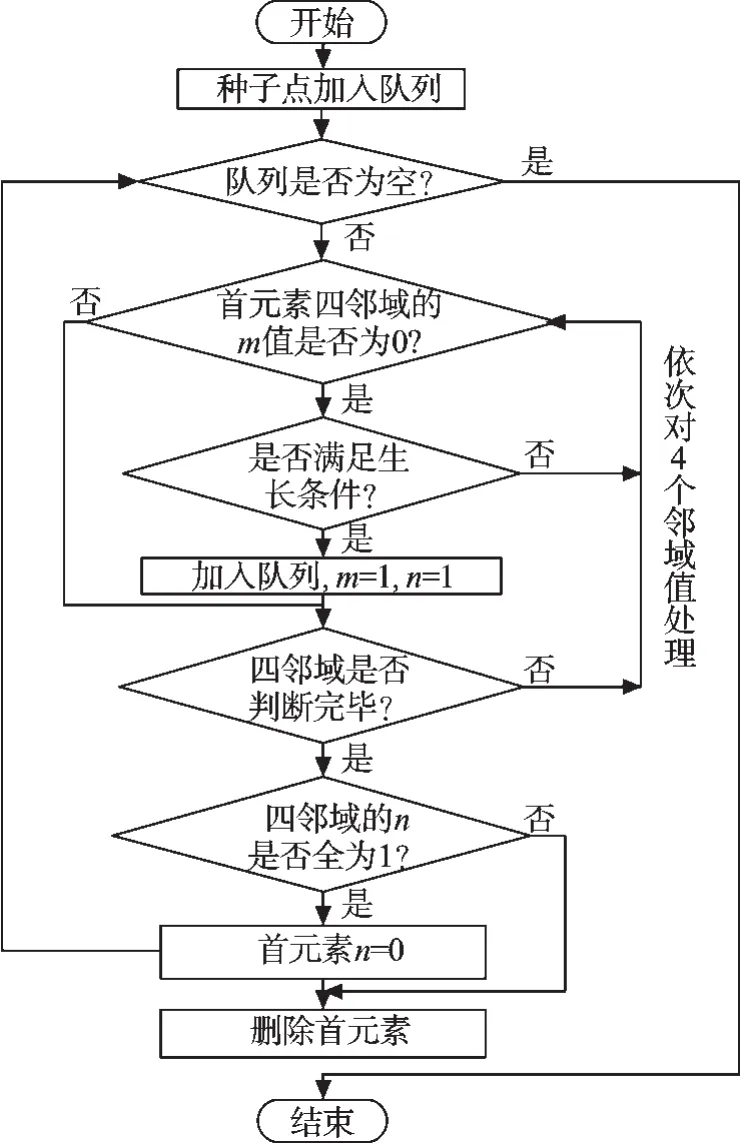
图1 种子生长流程图

式中:w—非负权值。
若s小于某一设定值,则可认为待测点与已分割区域相似,满足生长条件,同时需对均值x进行更新:

式中:N—已分割区域像素点数。
1.4 种子生长结果
本研究根据以上生长条件及生长准则,对一幅红外CT图像进行分割,区域生长结果如图2所示。
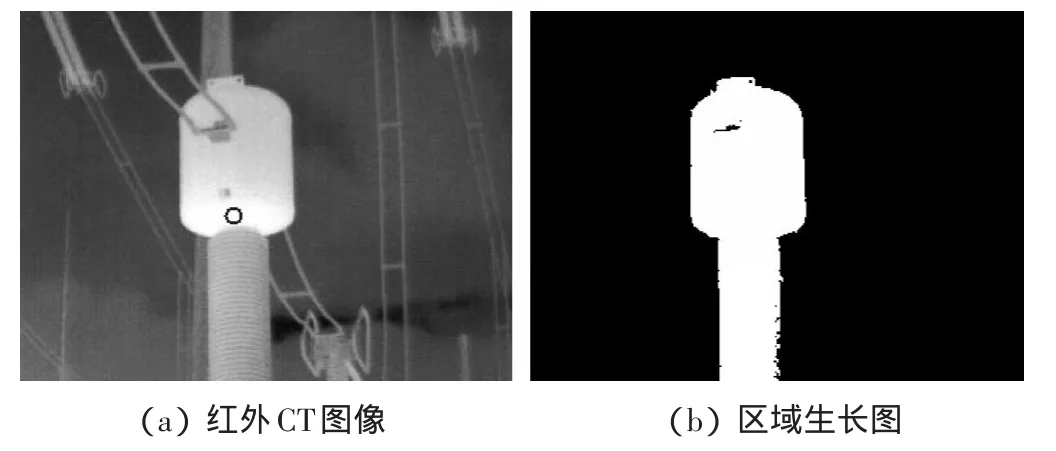
图2 区域生长结果
原始红外图如图2(a)所示,所选种子点在图中用小圆圈标记;区域生长结果图如图2(b)所示。从图2中可以看出,该方法能够较好地将红外图像中的目标区域提取出来,为后续识别过程提供高质量的分割图像。
2 Hu不变矩及其改进
Hu矩是1964年由Hu提出的[7],是提取图像旋转、缩放特征的二维不变矩理论,具有旋转、缩放和平移不变性。
设一幅图像大小为m×n,f(x,y)是图像中(x,y)点处的灰度值,则图像的(p+q)阶原点矩为:

为保证图像在旋转、缩放、平移时的不变性,求其中心距:

式中:x0,y0—整幅图像的中心坐标,x0=m10/m00,y0=m01/m00;(x0,y0)—图像的灰度质心。
中心距up q是图像平移的不变量,对其规范化,可得到平移和缩放的不变矩:

本研究应用代数不变矩理论,对f(x,y)的(p+q)阶中心距归一化后进行线性组合,得7个Hu不变矩,如下式所示:
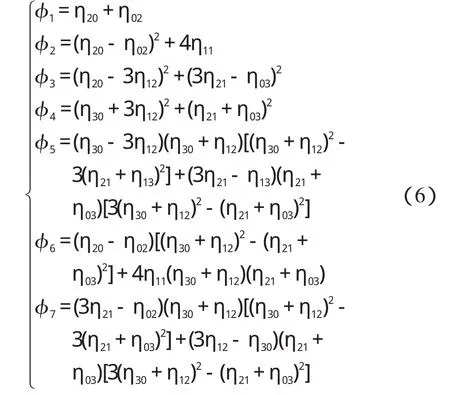
这7个不变距具有平移、缩放和旋转的不变性,但由于这7个不变矩变化范围较大,可能出现负值,因此,实际采用的不变矩为:

在实际应用中,图像不仅有位置和旋转的差别,还有尺度、对比度等差别,本研究对式(7)中各不变矩做组合变换[8],得到具有尺度、位置和旋转不变性的不变矩,如下式所示:
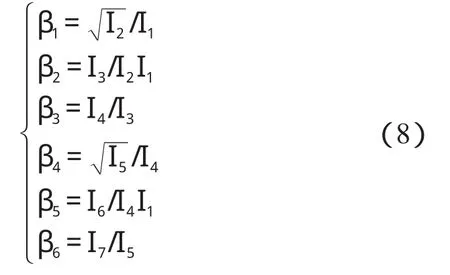
3 特征提取
特征提取是指从图像中提取出目标的特征,以做进一步的分析识别。本研究提取的对象为红外分割图像中的电力设备不变矩特征,获得6个不变矩组成的特征向量为I=(β1,β2,β3,β4,β5,β6)。
由以上分析可知,Hu不变矩具有平移、缩放和旋转的不变性,为验证该特性,本研究选择CT红外图像做旋转、缩放变换后进行分割,计算而得其不变矩特征如表1所示。
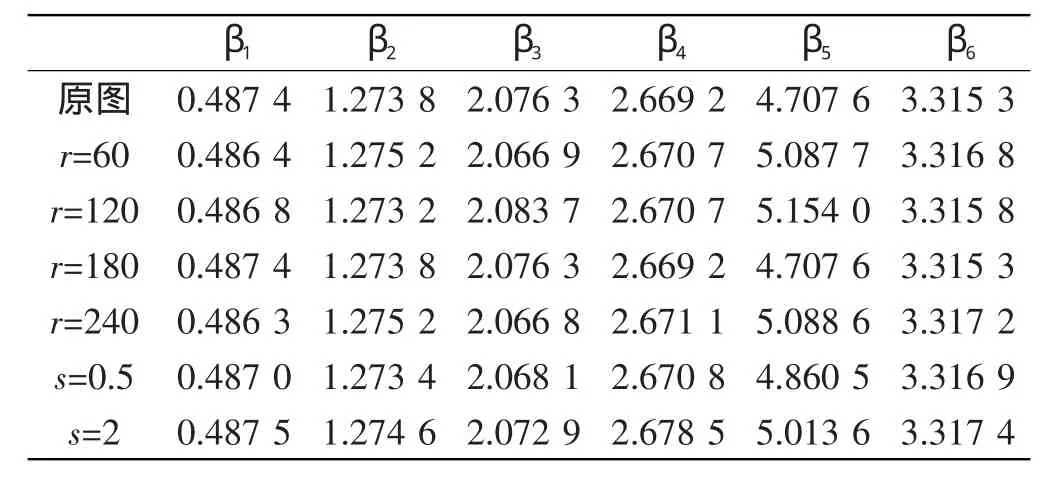
表1 CT红外图像不变矩特征提取
从表1可以看出,经旋转、缩放后CT红外图像的Hu不变矩与原始图像基本保持不变,保留了CT图像的特征,因此,其在实际应用中不会受到拍摄角度、拍摄距离等的影响。
为实现对不同电力设备的识别,本研究选择CT、变压器、母线接头和避雷针将军帽4种电力设备的红外图像进行分析,得到它们的不变矩如表2所示。
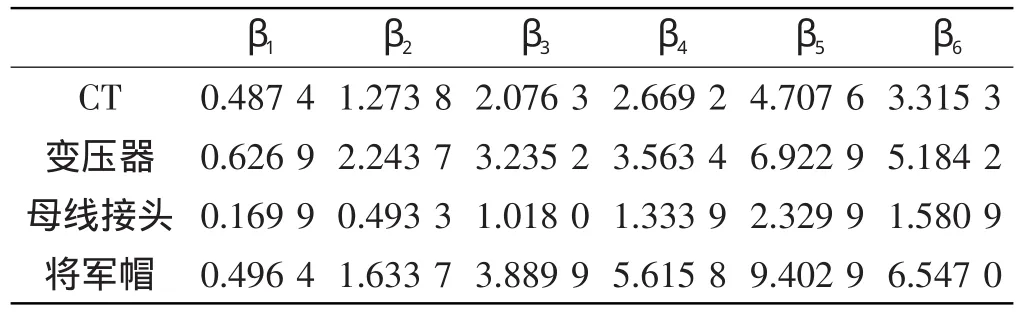
表2 不同电力设备的不变矩特征提取
通过研究表1和表2中数据可知,笔者提取得到的不同电力设备不变矩特征向量有较大差别,而相同电力设备的特征向量差别很小,因此本研究可根据分割图像的特征向量来对电力设备做进一步识别,并结合种子点的温度值来判断该设备是否产生故障。
4 BP神经网络分类器识别
特征提取的结果需要进行分类以确定设备类型,本研究选择BP神经网络设计一个多输出型分类器,其结构如图3所示。
分类器采用多输出型的3层BP神经网络,其拓扑结构为6—7—4。其中,6为输入节点数,即特征向量的维数;4为输出节点数,即输出的4个类;7为隐节点数,可根据分类器要求的训练时间和分类精度共同决定[9-11]。
BP网络结构确定之后,研究者要通过输入和输出样本集对网络进行训练,即对网络的阈值和权值进行学习和修正,以使网络实现给定的输入/输出映射关系,训练好的网络即可用于对未知样本的识别。
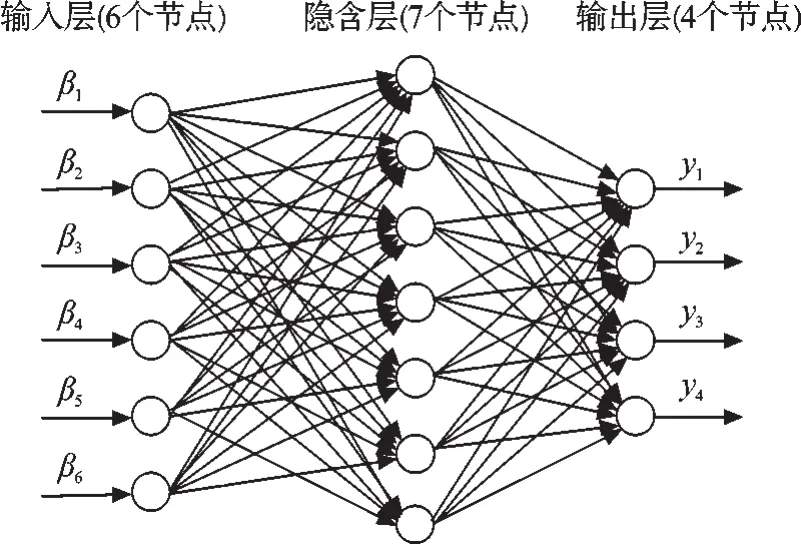
图3 BP分类器结构
训练和识别流程图如图4所示。

图4 BP网络识别流程
本研究选择红外CT、变压器、母线接头和避雷针将军帽各20幅图像,并对每幅图像做旋转60°、120°、180°、240°和放大0.5、2倍处理,共计得到560幅图像作为输入样本,对BP网络进行训练,训练误差为0.05。
训练误差曲线如图5所示。
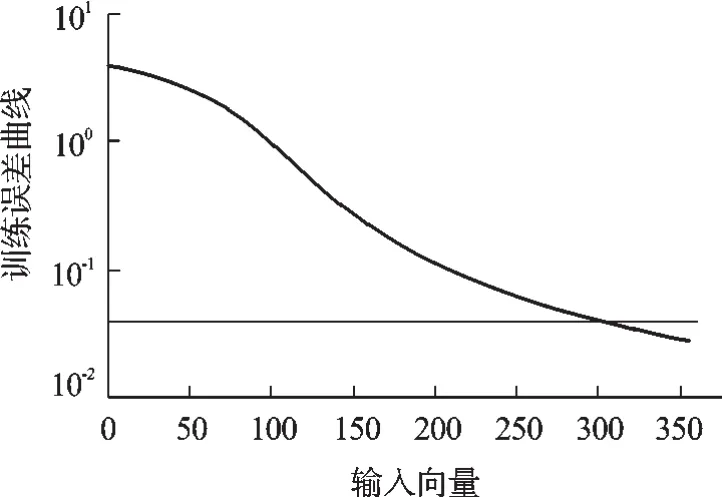
图5 网络误差曲线图
本研究对4种电力设备的红外图像各选取50张作为未知样本,输入训练好的分类器中进行识别。
BP网络分类器识别结果如表3所示。
通过分析表3数据可知,平均每幅图像的识别时间为0.2 s,可以满足实际应用的要求。该分类器的平均识别率为98%,其中不能识别的原因是由于红外拍摄过程中周围环境的反射太强,致使图像中背景亮度与设备边缘亮度比较接近,区域生长过程中出现边缘选择的错误,因此,研究者在拍摄过程中需尽量避免反射性强的环境。
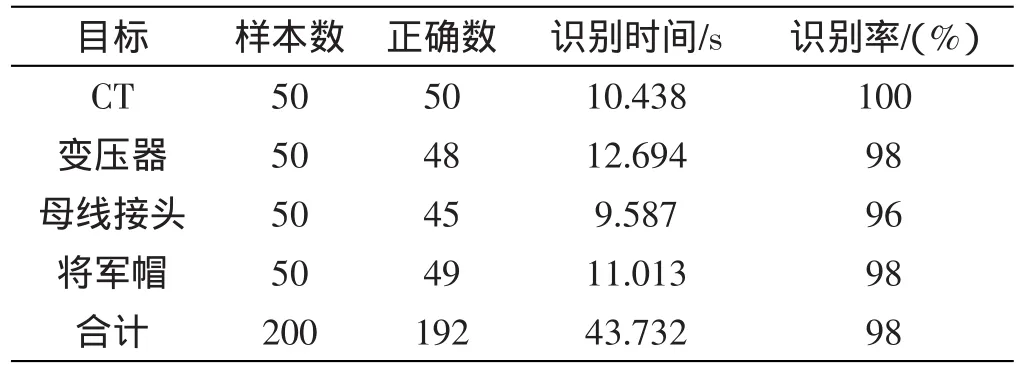
表3 BP网络分类器识别结果
5 结束语
本研究依据电力设备红外图像的特点,提出了采用区域生长的方法对红外图像进行分割,有效地去除了背景,获得了独立的电力设备二值图像;然后在Hu不变矩所具有的平移、旋转、缩放不变性基础上对其进行改进,并通过实际电力设备图像对以上特性做出验证,用于提取分割后图像中电力设备的不变矩特征;最后采用BP神经网络设计分类器,对提取出的不变矩特征向量作分类识别。
试验结果表明,该方法识别准确率高,在电力系统在线故障监测中有着良好的应用前景。
(References):
[1] 梁利利,赵高长.变电站红外图像的识别与故障诊断[D].西安:西安科技大学理学院,2010.
[2] 张益滔.红外线检测技术判断电气事故[J].高电压技术,2006,32(2):112-113.
[3] 张 浩,王 伟.图像识别技术在电力设备监测中的应用[J].电力系统保护与控制,2010,38(6):88-91.
[4] GONZALEZ R C.Digital Image Processing[M].Beijing:Publishing House of Electronics Industry,2010.
[5] 夏 晶,孙继根.基于区域生长的前视红外图像分割方法[J].激光与红外,2011,41(1):107-111.
[6] 周 赟,李久贤,夏良正.基于区域生长的红外图像分割[J].南京理工大学学报,2002,26(S1):75-78.
[7] HU M K.Visual pattern recognition by moment invariant[J].IEEE Transactions on Information Theory,1962,8(2):179-187.
[8] 田秋红,孙政荣.基于Hu不变矩和BP网络的条形码图像识 别 方 法[J].计 算 机 工 程 与 设 计 ,2012,33(4):1563-1568.
[9] 张德丰.MATLAB神经网络应用设计[M].2版.北京:机械工业出版社,2012.
[10] 张 宪,江爱荣.遗传算法优化的神经网络熔深预测模型[J].轻工机械,2011,29(3):27-31.
[11] 沈凤龙,毕 娟.基于BP神经网络分类器的多目标识别方法研究[J].辽东学院学报:自然科学版,2008,15(4):205-209.
