陶粒增强加气砌块生产线转位装置的设计
2013-09-12郑玲燕秦宝荣刘志伟王科中
郑玲燕,秦宝荣,刘志伟,王科中
(浙江工业大学特种装备制造和先进加工技术教育部重点实验室,浙江杭州 310014)
陶粒增强加气砌块生产线转位装置的设计
郑玲燕,秦宝荣,刘志伟,王科中
(浙江工业大学特种装备制造和先进加工技术教育部重点实验室,浙江杭州 310014)
陶粒增强加气砌块是一种新型自保温墙体材料。在砌块切割成型工艺中需要对坯料的位置状态进行旋转和翻转变换,为此设计了一种坯料转位装置。通过分析转位装置关键部件的变形状况对其工作的影响,应用有限元方法对该转位装置的关键部件进行了静力学分析,找出其刚度不足的部位,并对这些刚度不足部位进行了改进设计,提高了砌块生产线转位装置的静刚度,得到了满意的结果。
陶粒增强加气砌块;生产线;转位装置;设计;有限元;静力学分析
陶粒增强加气砌块是一种新型的建筑节能自保温墙体材料。以河道淤泥、粉煤灰、污泥制成轻质陶粒,再将轻质陶粒与粉煤灰、管桩余浆等主要材料,经配料、搅拌、浇注、养护、切割等工艺而制成的细密多孔状轻质加气混凝土砌块[1-2],具有质量轻、强度高、保温性能好、吸水率低、尺寸精度高等特点[3-4]。陶粒增强加气砌块切割成型的工艺过程中,坯料需要进行旋转和翻转等位置状态的变换。本文根据砌块切割成型工艺的需要,设计了转位装置,对转位装置关键部件在力学性能分析的基础上进行改进设计,得到了满意的结果。
1 砌块生产线转位装置的设计
陶粒增强加气砌块生产线转位装置如图1所示,由带升降装置的输送线、转位机械手、步进输送机、翻转叶轮和连续输送机等组成。经过第一次切割成片状的坯料输送到升降装置上方时,升降装置将坯料向上升起,转位机械手夹住坯料,将坯料移送至步进输送机上方,转位机械手移动过程中同时旋转90°,将纵向站立的片状坯料转变为横向站立,步进输送机将坯料输送至翻转叶轮,翻转叶轮将站立的片状坯料翻转成水平状态,放置到连续输送机上送至下一台切割机,将片状坯料切割成标准规格的砌块。

图1 陶粒增强加气砌块生产线转位装置
根据上述工作过程可知,转位机械手是整个转位装置的关键部件,它是靠夹紧力所产生的摩擦力工作的,夹紧力过大会损伤坯块表面,夹紧力不足会导致移送和旋转过程中坯料滑落。机械手部件本身的变形也会导致夹紧力的下降,从而影响其工作的可靠性。因此,对机械手的强度和刚度进行分析是十分必要的。
2 转位机械手静态特性分析
在对转位机械手进行几何建模时,去除对结构分析结果影响不大的局部细节,以降低有限元模型的复杂度和计算时间[5]。网格的划分是建立有限元模型的一个重要环节,它需要综合考虑多方面因素。网格质量的优劣对计算精度和计算规模都会产生直接的影响[6]。根据转位机械手各零部件的尺寸规格和预估计较大受力点,实行对不同部位分别设置尺寸的自由网格划分方法。经过反复划分计算,找到比较合理的网格划分形式,以提高分析精度[7]。
转位机械手除了自身的重力外[8],主要是受到液压缸给的推力、砌块在被夹紧时给手臂侧板的压力、沿手臂侧板向下的摩擦力和与砌块运动方向相反的惯性力。由于液压缸给的推力和砌块给的压力形成平衡力矩,所以在施加力时只需要对手臂侧板施加压力、摩擦力、惯性力就可以了。
已知砌块坯料尺寸为1 300mm×1 300mm×600mm,密度为850kg/m3,橡胶块规格为350mm×100mm×30mm,砌块与橡胶块间的摩擦系数为0.5,旋转电机的角加速度为0.314rad/s,横向运动时电机的启动加速度为0.15m/s2,所以砌块旋转时手臂侧板受到的惯性力F1=mrω2=47.07N,砌块横向运动时手臂侧板受到的惯性力F2=ma=119.34N。由于是对受力的极限位置进行静力分析,所以这里加载时惯性力取119.34N。同时根据上面的参数可以计算出每个橡胶块所受到的向下的摩擦力为1 949.22N,正压力为3 898.44N,压强为0.11MPa。
本文借助ANSYS Workbench软件[9]对转位机械手进行静力学分析。在完成网格划分及约束、加载等步骤后,对转位机械手进行有限元分析计算[10],得到的变形结果如图2所示。

图2 转位机械手变形分布图
从图2(a)可以看到,转位机械手在静载荷下发生了变形,机械手臂、机架及横梁均发生弯曲变形,但大部分变形都集中在机械手臂上,其最大变形量为1.877 7mm。从图2(b)可知,机械手臂侧板受到砌块的正压力后在长度方向发生了弯曲变形,但是由于受到惯性力的作用,侧板前端的变形程度略小于后端的变形程度。而图2(c)基本呈现直线状,说明机械手臂侧板高度方向本身的变形量并不是很大,其位置发生偏移主要是受侧板底部弯曲变形的牵动。这些结构的变形都会造成机械手臂侧板的外张,影响侧板夹取砌块动作的完成。
由于企业要求砌块生产线转位装置最大变形量不得超过0.5mm,而由图2可知转位机械手的最大变形量为1.877 7mm,已超出企业要求,所以为了保证砌块生产线转位装置工作的可行性及稳定性,需要对该转位机械手的结构进行改进,以减小其变形。从图2可以看出,转位机械手的较大变形都集中在机械手臂上,且最大变形量也在此位置。因此这里为了简化计算,只对机械手臂进行结构改进。
3 转位机械手部件改进设计
图3为机械手臂的原始结构及各改进方案的爆炸图。在图3(a)中,导轨由两块独立的凹型钢材焊接在面板上,两滑块间焊了1根横梁,用来连接液压缸,滑块与手臂侧板连接。对机械手臂的原始结构进行分析,得出机械手臂的变形过大可能是由于手臂侧板、导轨或滑块的静刚度不足所致。为此,对机械手臂的原始方案进行结构改进,以减小机械手臂的变形量,这里给出了3种机械手臂的改进方案。改进方案1如图3(b)所示,是将滑块改成2块独立的工字结构钢,相应的导轨槽改成T字型,手臂侧板加肋条,液压缸与手臂侧板相连;改进方案2如图3(c)所示,是将导轨改成圆柱式,液压缸与滑动手臂相连;改进方案3如图3(d)所示,是将矩形钢焊接在凹型面板上构成导轨,滑块由滑板替代,手臂侧板加肋条,液压缸与手臂侧板相连。机械手臂各改进方案的变形结果如图4所示。
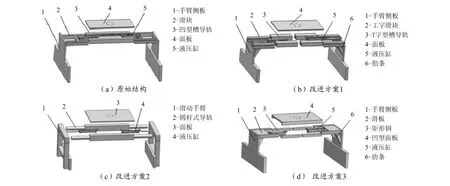
图3 机械手臂原始结构及各改进方案的爆炸图

图4 机械手臂各改进方案的变形分布图
由图4可知,机械手臂的变形情况都是面板发生弯曲变形,手臂侧板向外伸张。3种改进方案中,机械手臂最大变形量依次为0.64463mm、0.534 18mm、0.374 08mm。经比较可知,方案3的改进大大降低了机械手臂的变形程度,所以选择方案3作为机械手臂的设计结构。
将方案3中的机械手臂装配到转位机械手中,分析整个部件的变形情况,以验证整个部件的可靠性。改进后的转位机械手的变形结果如图5所示。
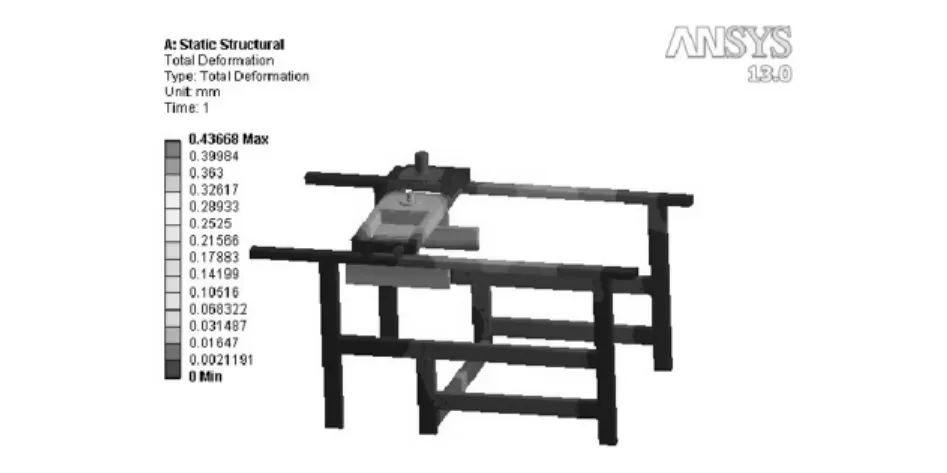
图5 改进后的转位机械手的总变形云图
通过分析计算,得出改进后的转位机械手的最大变形量为 0.436 68mm,较原始方案中的1.877 7mm变形程度有了很大的改善,而且这个变形量也符合企业整个装置最大变形低于0.5mm的要求,所以此结构可以作为砌块生产线转位装置的设计结构。
4 结束语
本文结合有限元分析技术对砌块生产线转位装置进行设计,通过对转位装置的关键部件进行静力学分析,得出转位机械手的变形分布图,找出转位机械手刚度的薄弱环节为机械手臂,从而对机械手臂的结构进行改进。在分析对比3套机械手臂改进方案后,找出最优方案。再把最优方案装配到转位机械手中,分析整个部件的变形情况,验证实验结果可靠,设计可行。将砌块生产线转位装置的设计与有限元分析技术结合起来,不仅可以降低生产成本、缩短设计周期,还能使得砌块生产线转位装置的设计更完美、性能更可靠。
[1]夏发斌.建筑外墙自保温墙体材料——陶粒增强加气砌块性能研究和实践应用[J].建设科技,2010(13):85-86.
[2]刘红梅,杨恒亮,房灵占.淤泥陶粒及其加气砌块生产技术研究[J].混凝土与水泥制品,2013(3):54 -57.
[3]范锦忠.陶粒泡沫混凝土砌块[J].砖瓦,2009(7):44-47.
[4]郭艳,李海艳,胡德勇.陶粒加气混凝土砌块性能分析[J].新材料与应用,2011(10):90-93.
[5]杨新华.剪板机结构有限元及模态分析[D].武汉:华中科技大学,2009.
[6]Ho-Le K.Finite element mesh generation methods[J].Com-puter Aided Design,1998,20(1):27-38.
[7]杜平安.有限元网格划分的基本原则[J].机械设计与制造,2000(1):36-38.
[8]张磊,谢志坤,李焱,等.基于有限元的高速龙门五轴加工中心动静态优化设计[J].机械设计与制造,2011(12):36-38.
[9]李兵,何正嘉,陈雪峰.ANSYS Workbench设计仿真与优化[M].北京:清华大学出版社,2011.
[10]凌桂龙,丁金滨,温正.ANSYS Workbench 13.0从入门到精通[M].北京:清华大学出版社,2012.
The Design of Transfer Device for Ceramsite-reinforced Aerated Concrete Block Production Line
ZHENG Lingyan,QIN Baorong,LIU Zhiwei,WANG Kezhong
(Zhejiang University of Technology,Zhejiang Hangzhou,310014,China)
Ceramsite-reinforced aerated concrete block is a new self-thermal insulation wall material.In order to rotate or reverse the blocks for the block cutting process,it designs a block transfer device.It analyzes the effects of the deformation condition of the transfer device's key component on its work.With the help of the finite element method,it analyzes the static character of the transfer device's key component,and obtains the deformed parts.Then it improves the fragile structures of the transfer device,and finally obtains the satisfactory results.
Ceramsite-reinforced Aerated Concrete Block;Transfer Device Design;Finite Element;Static A-nalysis
TH122
A
2095-509X(2013)11-0022-04
10.3969/j.issn.2095-509X.2013.11.006
2013-08-14
郑玲燕(1988—),女,江西南昌人,浙江工业大学硕士研究生,主要研究方向为机械设计及理论。
