太阳能电池板捕光及除尘系统
2013-09-08杨景发邹鹏飞李文静侯国栋苏安阁
张 玮,杨景发,邹鹏飞,李文静,侯国栋,苏安阁
(1.河北大学 物理科学与技术学院,河北 保定 071002;2.保定市第一中学,河北 保定 071002)
太阳能作为取之不尽、用之不竭的第一大清洁能源,已成为世界各国竞相开发的重点[1],太阳能光伏发电具有安全可靠、无污染、无噪声等优点。2010年中国太阳能光伏并网发电年新增安装容量(峰值功率)138MW,累计安装500MW。太阳能产业已成为全球发展最快的新兴行业之一。但同时太阳能也存在着密度低、间歇性、光照方向和强度随时间不断变化等问题。
光伏发电系统的光电转化装置——阵列式太阳能电池板,多采用固定式安装,不能实时追踪太阳位置的变化,致使采光效率较低,影响光电转换效率。另外,由于电池板表面充分裸露在室外空气中,随着时间积累,空气中的无机和有机灰尘会逐渐积累在其表面,既降低电池的能量转换效率,也容易因“热岛效应”造成电池局部发热而损坏,导致太阳能蓄电池因不能保持足够的电量而大大缩短寿命。综合比较实现追踪太阳的单轴追踪、双轴追踪、光敏电阻光强比较等方法[2],以及人工擦拭、刮刷式、高压水流/气流清洁等电池板除尘方法[3],我们设计了集“聚光”、“电池板倾角调节”、“平行于地轴的定点定角单轴追踪”和“高压风力除尘”于一体的“太阳能电池板捕光及除尘系统”,充分提高太阳能电池的光电转化率。
1 设计原理
1.1 追踪/不追踪太阳照度比较
在空旷的楼顶进行对比实验,通过测量追踪太阳与不追踪2种情况下的太阳照度(EA为不追踪太阳时的照度,EB为追踪太阳时的照度),来比较太阳能电池板的受光情况,测量结果见表1。由表1可得出:当对太阳进行追踪时,其照度值比不追踪时平均高出约29.8%。

表1 追踪/不追踪太阳照度
1.2 光强对太阳能电池开路电压和短路电流的影响
利用FZ-GDD硅光电池特性实验仪,调整电池板与光源之间距离,测量不同距离下电池板的开路电压UOC和短路电流ISC,测量结果见图1。
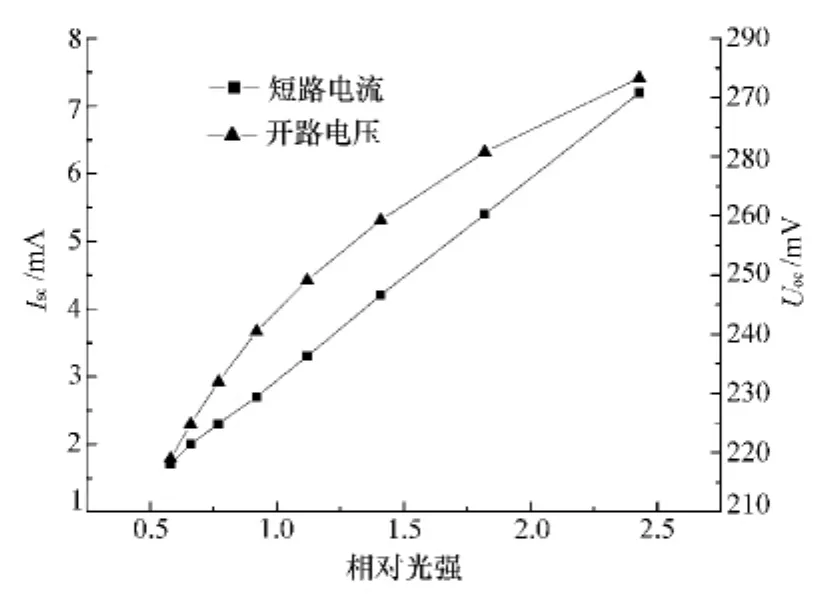
图1 硅光电池板光照效应
1.3 保定地区太阳运行轨道图
太阳高度角α、太阳赤纬角δ和太阳方位角的计算公式[4]分别为:


式中,φ为当地的地理纬度[5],ω为太阳时角,N 为从1月1日起,到该天的天数。
根据以上式计算与太阳能应用有关的参数,并由所得数据获得了太阳运行轨迹,见图2[6]。

图2 保定地区太阳轨迹图计算模拟
1.4 太阳能电池板倾角选择
根据地球绕太阳运行的规律可知:即使在同纬度的地方,在不同的季节,太阳的入射角也是不同的。依据本次设计并参考相关文献中的资料,为获得最大的日射量,电池板的倾角β推荐值如下:全年使用,β=φ,夏季(从春分到秋分)使用,β=φ-10°;冬季(从秋分到春分)使用,β=φ+10°;由保定的地理位置可得,夏季太阳能电池板倾角为38°,冬季为43°。
2 太阳能电池板捕光与除尘系统的设计
太阳能电池板捕光与除尘系统主要由聚光模块、追踪模块、高压风力除尘模块和电源模块等部分组成,见图3。
2.1 聚光模块设计
利用聚集反射技术,在太阳能电池板的左右两侧布置反光铝板,通过实验比较,确定铝板和太阳能电池板夹角,使太阳能电池板接收尽可能多的太阳能,减小太阳能量的分散性和太阳光的不均匀性,提高光电转换效率。
经过计算比较,将铝板和太阳能电池板成60°角布置时,在电池板受光面积不变的情况下,其使用的反射铝板的面积最小,成本也就低。聚光板块结构示意见图4。
2.2 太阳能电池板追踪模块设计
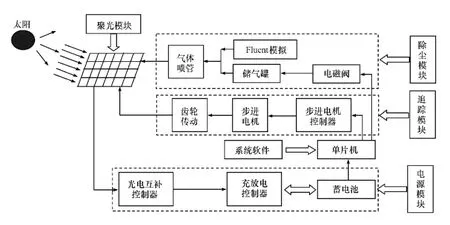
图3 太阳电池板捕光及除尘系统结构框图
追踪模块采用“平行于地轴的定点定角单轴追踪”系统,包括硬件结构和软件两部分。首先进行初始设定:根据不同的季节、地理纬度,通过手动旋钮设定电池板的安装倾角;通过软件设定每个时钟点的水平方向旋转角度。设定完成后,系统软件发出控制信号(步进时钟脉冲)驱动步进电机带动小齿轮转动,小齿轮带动大齿轮和主轴转动,实现电池板单轴(东西向)跟踪。
2.2.1 追踪模块的硬件结构设计
追踪模块硬件主要由底座、主轴、齿轮、轴承和步进电机[7]、手动刻度旋钮等部分组成,见图5。

图4 太阳电池板聚光结构示意图
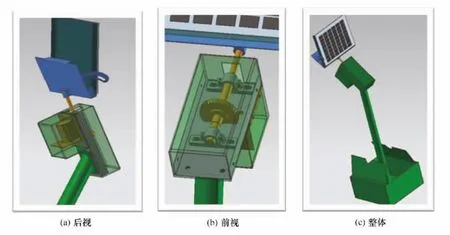
图5 追踪模块后视、前视和整体结构
该系统设计要点:主轴与地轴平行;根据电池板质量确定扭矩,进而选择步进电机的型号和驱动器;通过齿轮啮合,实现变速;使用轴承减小阻力;硬件部分安装在立杆的顶部平台上,样机设计时,缩短立杆;控制箱设计在底部。设计时先进行Pro/E模型设计[8],再进行CAD设计。
2.2.2 电池板专用调角盘
设置一个“电池板专用调角盘”(见图6),用于调节太阳能电池板的倾角。根据地理纬度、不同的季节,通过手动旋钮方便、准确地设定电池板的安装仰俯角。
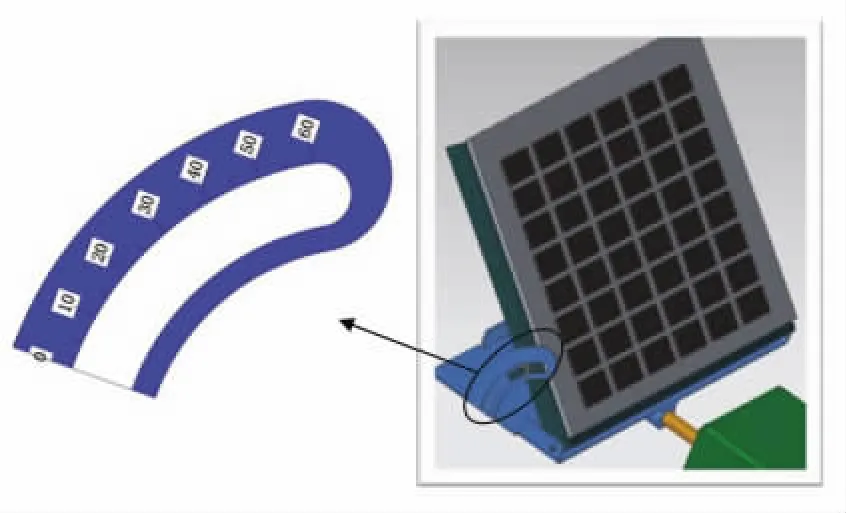
图6 太阳电池板专用调角结构
2.2.3 单片机主控器硬件接口电路设计
利用单片机最小系统,分配步进电机的控制端口,设计控制接口电路(见图7),用继电器实现小电流控制大电流,完成电池板追踪旋转。

图7 单片机控制接口电路
2.2.4 追踪模块的软件设计
跟踪系统软件设计所用单片机为STC89C54,系统软件采用C语言编写,依据跟踪方案,完成时钟、定点旋转角度和自动复位设定[9],程序流程图见图8。
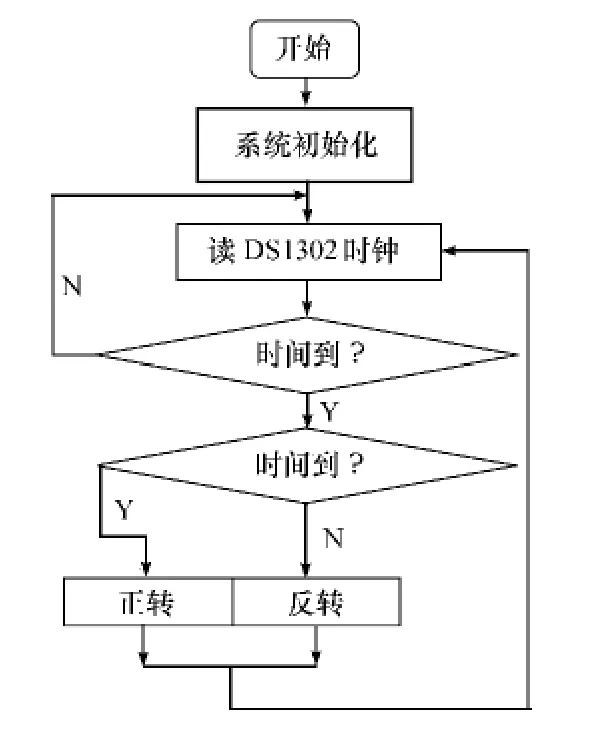
图8 程序流程图
2.3 高压风力除尘结构设计
在太阳能电池板的高端斜后方,安装一个带倾角的气体喷管。首先进行喷管进风口和出风口设计[10]。设计时,参照相应的流体力学知识,为使喷管出风较为均匀,且在一定长度距离内使水头损失、能量损失达到最小。利用流体力学fluent软件对进风口个数、出风口孔洞形状(圆/方)、个数进行模拟比较[11]。
由模拟分析可知:2个进风口、每个分管一段,出风口形状为圆形,多个出风口的效果最好,风量均匀,风速较大,而出风口开成狭缝以后,风速较小,达不到除尘要求。故最终设计为:2个进风口、17个圆形出风口。进风口通过软管经控制阀与高压储气罐连接,利用单片机定时点开启控制阀,一定压力的气体通过小孔均匀喷出,转化为高速微细气体射流,形成对电池板表面的喷射力,实现较大面积除尘。
2.4 太阳能电池板光电互补电源模块设计
太阳能发电系统由太阳能电池板、太阳能控制器、蓄电池(组)组成,同时备用了一套AC/DC市电供电系统实现光电互补[12],可在2种供电方式中自由切换,以保障系统的运行的稳定性,增强实用性。
2.5 整机设计与制作
本系统由太阳能电池板跟踪装置、风力除尘装置和控制电路硬软件等部分组成。制作初期设计了多种样机模型,经多次论证,确定最终的结构。制作过程中严格遵循科学布局、结构严谨、务实简洁的思想,按照机械制作标准制作而成,样机见图9。

图9 太阳能电池板捕光及除尘装置
3 结论
本系统是基于单片机的自动控制系统,配合精密机械装置使系统更加稳定,提高系统追踪太阳的精度,独创的高压风除尘法,能够有效除去太阳能电池板表面灰尘,显著提高了太阳能光伏发电系统的综合发电效率。太阳能具有洁净、方便、无尽等优势,有理由相信,本项目成果的转化,必将产生可观的环境效益、经济效益和社会效益。
(References)
[1]吴红山.太阳能的应用现状及发展前景[J].科技信息:学术研究,2008(7):72-74.
[2]程智峰,郑浩俊.一种利用高压水流对太阳能电池板阵列自动除尘的系统:中国,201950044[P].2010-12-28.
[3]周诗悦,朱凯,刘爽.太阳能电池板自动跟踪系统[J].控制工程,2009,16(增刊):17-19.
[4]关继文,孔令成,张志华.高精度太阳能跟踪控制器设计与实现[J].自动化与仪器仪表,2010(3):23-25.
[5]罗运俊.太阳热水器技术讲座(一):太阳热水器发展概况及基本知识[J].可再生能源,2004(1):58-61.
[6]徐利,曹莹,是度芳.太阳能电池板跟踪与太阳相对地面的运动轨道研究[J].科技创新导报,2010(29):12-13.
[7]陈旭平,熊德敏,胡联红.步进电机在太阳能跟踪器上的应用[J].今日科技,2008(8):46-47.
[8]任丰兰,曾经梁.PRO/E软件在机械制图中的应用[J].农机使用与维修,2012(5):91-93.
[9]李杜.以STC89C52RC为核心的实用单片机教学板设计[J].湖南工程学院学报,2012,22(3):18-20.
[10]程智峰,郑浩俊.一种利用高压气流对太阳能电池板阵列自动除尘的系统:中国,201950[P].2010-12-28.
[11]郭婷婷,李雪梅,冯博.电除尘器内斜气流特性的数值研究[J].华北电力大学学报,2008,36(5):50-55.
[12]贲礼进,曹莹,倪有军.太阳能家用电站系统设计方法[J].新能源,2010(12):53-55.
