基于双偏心轴驱动的声频振动钻机设计研究
2013-09-07刘宝林胡远彪高明帅
王 瑜 刘宝林 周 琴 胡远彪 高明帅
中国地质大学(北京)国土资源部深部地质钻探技术重点实验室,北京,100083
0 引言
液压钻机是进行能源勘探、环境取样[1]、工程勘察、水井建设等工程的关键设备,广泛用于煤矿采煤工作面瓦斯抽放孔、注水孔、探水孔、防突孔[2]、救援孔等的钻进,以及地表浅层的钻进取样。目前使用广泛的是旋转式钻机[3],该钻机一般需要泥浆配合钻进,以防止烧钻,并利用泥浆黏性护住井壁[4-5],但泥浆的化学成分往往对样品的扰动较大,且回转钻进方法在松散地层的钻进速度较振动钻进方法钻进速度慢。
声频钻进技术使用液压驱动钻进、无需泥浆[6],是一种高效的新型振动钻进技术[7-9],目前,这一技术在国内尚属空白[10]。本文分析了声频振动钻进技术的工作原理,基于虚拟样机技术设计了一种基于液压马达驱动的双偏心惯性轴的声频振动钻机,在虚拟样机模拟分析的基础上,制造了声频振动钻机的实物样机,对样机的性能进行了测试,并进行了现场钻进取样实验。
1 声频振动钻进原理与特点
1.1 声频振动钻进原理
双偏心轴驱动的声频振动钻进技术基本原理如图1所示,激振器上安装的两个高速的液压马达分别驱动两根质量为m的偏心轴形成偏心系统,偏心距为e,两偏心系统以ω的角速度作高速旋转,运动方向相反,当两偏心系统初相位和转速完全相等时,其产生的横向力相互抵消,而在纵向(钻杆轴向)上的合力得到加强,为两个偏心系统产生的激振力之和,即轴向的激振力为

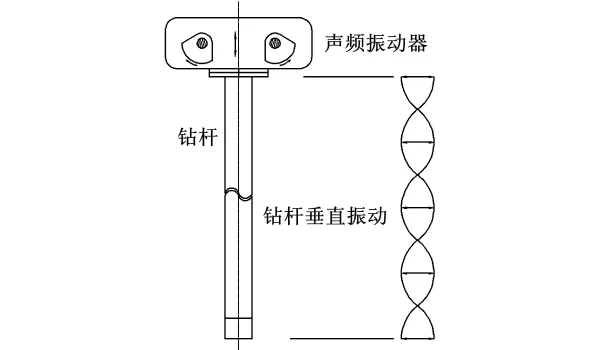
图1 声频振动钻进原理
当激振器的激振与钻柱自然谐振频率叠合时产生共振,振动的能量通过钻杆传递到孔底,在高频的激振能量作用下,钻头周围的土壤被液化,钻头便高速排开周围土壤进行钻进;同时,在钻杆内部装有塑料的内管取样筒,当钻杆钻进时,地层土壤进入取样筒,钻杆起到保护孔壁的作用,避免使用泥浆,使样品遭到化学侵蚀,土壤也因此保持了高度的层状关系。
1.2 声频振动钻进特点
声频振动钻进技术使用双液压马达驱动偏心部分,以人耳能听见的50~200Hz的频率进行振动钻进,由于不使用任何泥浆,故对样品和环境没有任何污染,能够真正获得连续的、非扰动的柱状样品;由于在钻进过程中,钻柱不回转,或者仅作极低速旋转以防止松扣,所以使得钻柱与孔壁之间的摩擦阻尼大为减小,节省了动力输出[11]。高频的振动使土壤局部液化,钻进速度快,比常规的钻探方法速度快2~3倍,钻探成本降低30%~60%,是一种高效、环保的新型钻进技术。
声频振动钻机目前在国外已经成功应用于地质勘探、浅层地热开发、矿山救援、环境取样、土壤修复、地震勘探、排水工程、炮弹探测、地基工程、矿产取样、考古取样、路基取样、浅海取样、静力触探、水井建设等领域[12],特别是声频振动钻进技术无需使用水,在干旱缺水地区、松散地层等工况条件下具有不可替代的优势[13]。
2 声频振动钻机设计
2.1 钻机整体技术方案
声频振动钻机是实施声频振动钻进技术的关键设备,在声频振动钻进操作过程中必须具备提供向下的激振力与钻压、处理事故的向上起拔力,以及行走等辅助操作的能力。声频振动钻机设计目标为振动钻深50m。声频振动钻机包括激振器、液压系统、桅杆以及底盘支撑系统等四大部分。激振器由高速液压马达驱动,提供声频激振力,它是声频振动钻机最关键的部分;桅杆提供声频激振器上下运动的轨道,其内部设置的起升液压缸提供钻进钻压与起拔力;液压系统由柴油机驱动,是声频振动钻机的动力来源;而底盘则将各种部件集成在上面,为钻机的主要操作和辅助操作提供平台。
利用虚拟样机技术,在Solidwork2010环境下,根据钻机各零部件的物理信息及其几何信息建立三维模型,定义零部件间的连接关系并对机械系统进行虚拟装配,形成的声频振动钻机的虚拟样机如图2所示。在装配的过程中,进行各部分的装配分析,确定整体与各部分尺寸,防止零部件之间的干涉,并且设定一定的虚拟环境对声频钻机激振器、桅杆等其他关键部件进行动力学分析、强度分析,在设计初期便可以发现问题[14-15],而且可以直接修改缺陷,对声频振动钻机进行整体改进,形成最优设计方案。虚拟样机技术在声频振动钻机开发中的应用缩短了开发周期[16],大大提高了设计质量和效率。
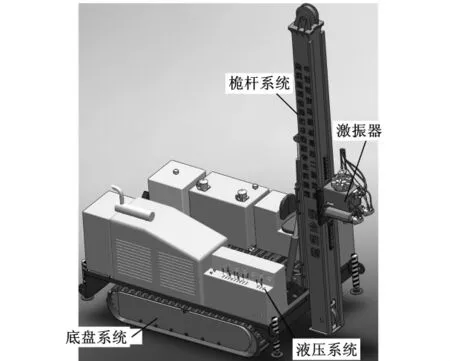
图2 基于虚拟样机技术的声频振动钻机
2.2 声频激振器
声频激振器是声频振动钻机最关键的设备,声频激振器主要包括回转马达、阀块、支撑架、隔振器、偏心部分、振动体以及钻杆接头等部分,如图3所示。
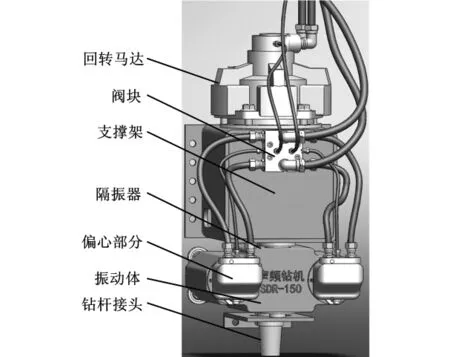
图3 声频激振器虚拟样机
马达高速旋转产生上下方向(钻杆轴线方向)的自激振能量,带动左右两个偏心部分振动体振动,由隔振器将振动体与支撑架隔开,减少振动,以免振动传递到非振动部分。支撑架的上方装有回转马达,以满足声频振动钻进过程中的缓慢旋转以防止钻杆脱扣。阀块的主要作用是对进入两个振动马达、回转马达中的流量进行分配,同时将马达回油进行合流,并保证泄油通道畅通。激振器振动时,整个振动体以50~200Hz的频率作振动,通过钻杆接头传递到钻杆上,并传播到孔底。激振器整体安装在桅杆上,通过桅杆内部的加压油缸的控制,使钻头一直保持一定的钻压进行钻进。激振器钻杆接头为中空结构,作为预备的泥浆循环通道,以适应某些需要使用回转钻进的特殊场合。
2.3 声频振动液压系统
液压系统为声频振动、进给以及起升桅杆、钻机行走、液压支腿等辅助动作提供动力,并对动作进行控制。为达到设计目标,提高液压系统使用效率,声频振动钻机的液压系统采用了1个主油路和1个辅助油路的开式系统,系统工作压力为21MPa。
图4所示为声频振动钻机液压原理,主油路Ⅰ采用了负载敏感变量泵和负载敏感多路比例换向阀6的油路系统、驱动振动马达和回转马达1以及两个行走马达2。由于钻机在进行作业操作时,行走马达并不工作,因此保证了作为主要动作的振动和低速回转的流量要求。主系统多路阀采用摩擦定位和压力补偿,具有良好的线性输出特性以及在不同流量和负载作用下的工作独立性。带有负载的敏感泵和多路阀组成的控制回路能根据负载的压力反馈自动调节系统流量,使不同钻深所需要的功率与液压系统的输出功率相匹配,减少系统能量损失和系统发热。
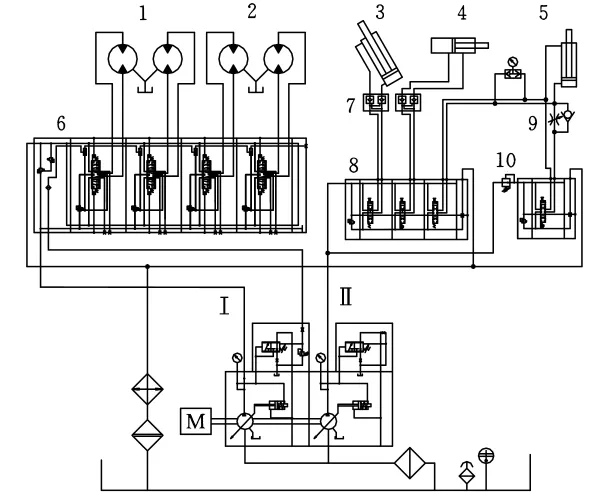
图4 声频振动钻机液压原理图
辅助油路Ⅱ采用恒压泵和多路阀8驱动桅杆起升液压缸3、液压支腿液缸4以及进给液压缸5动作。起升液压缸3和液压支腿液缸4均设置液压锁,以保证液压缸能够长时间进行保压。进给液压缸设置了节流阀9进行激振器提升和下放时的速度控制,压力阀10则控制进给液压缸工作压力,以控制钻进时的钻压要求。
主回路和辅助回路的回油合流后,经冷却器、过滤器进入油箱。液压系统主辅泵采用双联泵,由康明斯涡轮增压柴油机进行驱动,柴油机配置三重冷却器为液压油、涡轮废气、柴油机冷却水同时进行冷却,保证了液压系统温升可控,液压系统简单、稳定可靠。
3 声频振动钻机实验
声频振动钻进中的振动能量来自激振器,而钻杆则传递振动的能量,通过钻杆将振动与土壤之间的相互作用建立起联系。在开发过程中,对声频激振器的能量产生效果和振动钻进效果进行了实验。
3.1 激振器振动能量测试
激振器在振动时,周期性地输出上下方向(钻杆方向)的激振力,通过对振动体振动的加速度和振动体质量进行测试,即可测定声频振动输出的能量。测试系统硬件采用美国NI公司的USB-6210即插即拔型高速数据采集卡,利用Lab-View2009编写声频振动虚拟仪器测试软件系统,测试系统具有采集参数设置、数据实时显示、数据文件保存、数据滤波等功能。测试系统运行平台为ThinkPad T410便携式计算机,采集数据精度达16位,最高采样速率为250Hz,高速的硬件配置为数据采集提供可靠保证,测试现场如图5所示。
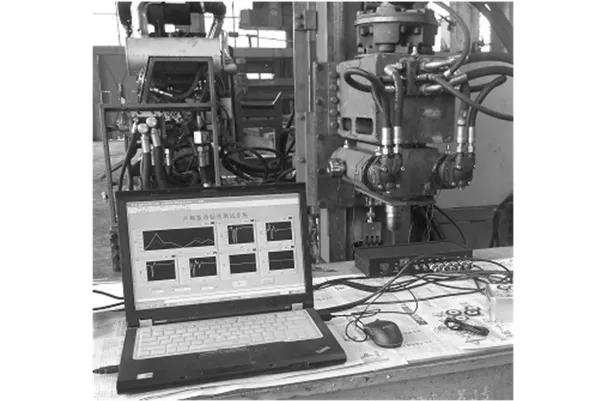
图5 激振器测试现场
测试传感器采用朗斯LC0123型加速度计,测量范围为-500g~500g,通过调理器后输出信号为±5V,数据采集采用双通道差分输出。图6为数据采集频率为3000Hz,液压马达转速达到12 000r/min时所实测的振动体加速度曲线。从曲线上可以看出,此转速下声频激振器输出最大加速度约为200g,振动加速度输出振动规律稳定,基本呈现正弦关系,考虑到振动体质量约为90kg,不带钻杆空载时,输出激振力约17.6kN,为钻进提供了足够的能量。

图6 振动体激振加速度曲线
3.2 钻进现场测试
钻机装配成功后,2011年11月初在中国煤田地质总局的配合下,在河北涿州地表沉积层进行了现场钻进与取样实验,实验中采用外径为50mm的普通地质钻杆,取心筒直径为108mm。实验实际取心回次为23次,钻进47m,穿越多个交替的粘土层、砂层、砾石层,最大取样长度达到取样筒长度(3m),总体取样率达到90%以上,部分取心回次取心率最低也达到63%,砾石层中最大的鹅卵石直径达到了80mm,部分砾石被排开或者切断。
实验过程中,双偏心轴驱动的声频振动钻进速度快,最大钻速达0.31m/s,取样效率高、钻进能力强,实际钻进过程中没有使用任何水或泥浆,样品地层分界明显,地质信息完整,达到了声频振动钻机设计的目标。
4 结语
本文采用虚拟样机技术,开发了基于双偏心惯性轴的声频振动钻机的虚拟样机与实物样机,在此基础上开展了声频振动室内实验研究,以及现场钻进实验研究。实验证明:基于液压马达驱动的双偏心惯性轴的声频振动钻进技术可行,钻进速度快、取样无扰动、质量高,钻进振动能量密度大,无水钻进过程环保、高效。在干旱缺水地区、松散地层等工况条件下具有不可替代的作用,在资源和环境问题日益受到重视的今天具有良好的发展前景。
[1]孙强,蔡运龙.北京城市扩展的环境效应模拟与评价[J].重庆建筑大学学报,2008,30(5):123-134.Sun Qiang,Cai Yunlong.Environmental Impact Modeling of Urban Sprawl in Beijing,P.R.China[J].Journal of Chongqing Jianzhu University,2008,30(5):123-134.
[2]赵亮,赵继云.乳化液钻机马达优化设计[J].煤炭学报,2009,34(1):121-124.Zhao Liang,Zhao Jiyun.Optimal Designing of Motor of Emulsion Drill Rig[J].Journal of China Coal Society,2009,34(1):121-124.
[3]胡志坚,孙友宏.钻进控制模拟系统及控制算法的设计与试验[J].煤炭学报,2009,34(4):455-460.Hu Zhijian,Sun Youhong.Design and Experimental of Simulation System and Algorithm for Drilling Control[J].Journal of China Coal Society,2009,34(4):455-460.
[4]阎波杰,潘瑜春,赵春江.区域土壤重金属空间变异及合理采样数确定[J].农业工程学报,2008,24(增刊2):260-264.Yan Bojie,Pan Yuchun,Zhao Chunjiang.Spatial Variability and Reasonable Sampling Number of Regional Soil Heavy Metals[J].Transactions of the Chinese Society of Agricultural Engineering,2008,24(S2):260-264.
[5]王云岗,章光,胡琦.钻孔灌注桩孔壁稳定性分析[J].岩石力学与工程学报,2011,30(增刊1):3281-3287.Wang Yungang,Zhang Guang,Hu Qi.Analysis of Stability of Bored Pile Hole- well[J].Chinese Journal of Rock Mechanics and Engineering,2011,30(S1):3281-3287.
[6]刘睦峰,彭振斌,王建军等.砂卵石层泥浆护壁与旋挖钻进工艺[J].中南大学学报(自然科学版),2010,41(1):265-271.Liu Mufeng,Peng Zhenbin,Wang Jianjun.Mechanism of Mud Job and Rotary Drilling Technology in Sand and Gravel[J].Journal of Central South University(Science and Technology),2010,41(1):265-271.
[7]Nel J.Sonic Drilling-environmentally Friendly Alternative[J].Geodrilling International,2002(5):20-21.
[8]吴光琳.声波钻进技术的发展及其应用[J].探矿工程(岩土钻掘工程),2004(3):39-41.Wu Guanglin.The Development of Sonic Drilling Technology and Its Applications[J].Exploration Engineering(Drilling & Tunneling),2004(3):39-41.
[9]Nancy A.The Origins of Sonic[J].Geodrilling International,2006,12:17-18.
[10]Anon.The Development of Sonic Drilling Technology[J].Geodrilling International,2002,12:7-10.
[11]熊玉成.声频振动钻进的机理研究[D].北京:中国地质大学(北京),2007.
[12]Christoforou A,Yigit A.Dynamic Modelling of Rotating Drillstrings with Borehole Interactions[J].J.Sound Vib.,1997,206(6):243-260.
[13]史海岐,刘宝林.声频振动钻机及其液压系统的设计[J].探矿工程(岩土钻掘工程),2007(7):44-46.Shi Haiqi,Liu Baolin.Design on Sonic Frequency Resonance Drill and Hydraulic Pressure System[J].Exploration Engineering (Drilling & Tunneling),2007(7):44-46.
[14]陈修龙,邓昱,赵永生.五自由度并联机床虚拟样机建模与仿真[J].农业机械学报,2008,39(1):155-159.Chen Xiulong,Deng Yu,Zhao Yongsheng.Modeling and Simulation on Virtual Prototype of Novel Five-axis Parallel Machine Tool[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(1):155-159.
[15]Fandai W F,Martin G.Applying Virtual Reality to Electronic Prototyping-concept and First Results Virtual Prototyping Virtual Environments and the Product Design Process[M].Melbourne:Chap Man and Hall Press,1995.
[16]Kerttulam S,Heikkinenm.VirtualReality Prototyping a Framework for the Development of Electronics and Telecommunications Products[C]//Proceeedings of 8th IEEE International Workshop on Rapid System Prorotyping.Chapel Hill,1997:2-11.
