CAN总线通信在组合式三相光伏逆变器中的应用
2013-09-04张雪松胡天友
张雪松, 胡天友, 刘 倩, 王 海
(电子科技大学机械电子工程学院,四川成都611731)
0 引言
三相光伏逆变器一般有两种实现方式,一种是光伏阵列经直流升压后接三相全桥或半桥;另一种称为组合式三相逆变器,是将三台单相光伏逆变器进行Y/△连接。相比第一种方式,第二种方式成本较高,但是不需要承受较高的直流母线电压,抗不对称三相负载能力更强,具有广泛的研究前景[1-2]。
本设计的项目背景是某一基于第二种方式研制的组合式三相光伏逆变系统。系统结构图如图1所示,光伏阵列经直流变换后分别与3个单相逆变桥相连,三者采用三相四线制连接形成A、B、C三相电压。考虑到三相的功率平衡,该系统的最大功率点跟踪控制(MPPT)是放在靠近输出端的逆变环节中进行的。该系统共由4个DSP芯片控制:DSP_DC控制3个DC-DC环节的升压,同时通过数据采集模块和AD转换器对其中某一DC-DC环节的输出电压和电流进行实时采集作为后级MPPT控制的输入参数;DSP_A、DSP_B、DSP_C分别控制A、B、C三相的逆变桥。正弦参考信号的相位由电网采样提供,而幅值则根据当前光伏阵列的最大输出功率进行动态调节。为了实现MPPT控制,控制逆变桥的3个DSP需要从控制DC-DC环节的DSP中快速获取直流侧的实时输出电压、电流和功率数据。4个DSP之间需要进行高速可靠的通信。为了便于观测,还需要将数据传送给PC机进行监控。
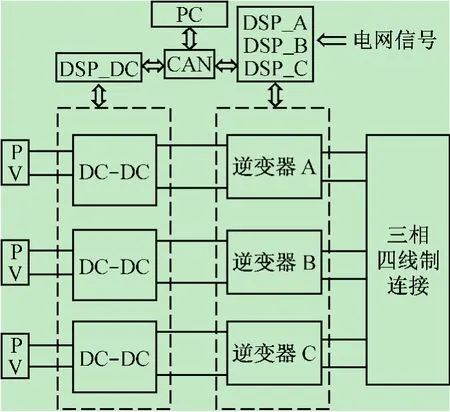
图1 系统结构图
系统选用的 DSP芯片是 TI公司的TMS320LF2407A。TMS320LF2407A之间的通信一般有SCI串行通信、SPI串行通信和CAN总线通信三种方式。前两种方式主要存在的问题是SCI数据长度只有8位,SPI会接收到伪数据[3]。第三种方式,其CAN总线通信使用普通的双绞线就可以进行数据传输,理论上允许挂接多达110个节点,组网灵活方便,传输距离最远可达10 km,最高传输速率可达1Mb/s,允许多个节点同时向总线发送数据,通信错误率极低[4],并且便于使用PC机进行监控。CAN总线通信广泛应用于汽车驱动系统[5]、逆变器并联运行[6]等需要多机通信的工程中。本设计也采用CAN总线进行通信。
1 TMSLF2407A的内嵌CAN模块
TMS320LF2407A本身已经内嵌了一个16 bit的CAN模块,支持 CAN2.0B协议。邮箱方式是TMS320LF2407A内嵌CAN模块的一大特点。它将芯片内部数据空间7200-7230的48×16位RAM分成6个邮箱,每个邮箱可以存储8 Byte数据。邮箱0、1用于接收,4、5用于发送,2、3可以根据用户需要定义为接收或者发送邮箱。每个邮箱都有独立的标识符和控制域[4]。
2 硬件设计
2.1 PC机与CAN总线接口设计
整个系统的通信原理图如图2所示。PC机的串口是标准的RS-232接口,数据信息是以字节为单位传送。而CAN总线信号是以帧为单位进行传送,一帧可能包含多个字节数据,因此PC机与CAN总线之间必须通过CAN卡连接[7]。目前应用比较广泛的CAN卡包括 PCI-CAN卡、CAN232接口卡和 USB-CAN卡等[8]。本设计选用的是武汉若比特公司生产的USBCAN V3通信模块,该模块附带电气隔离和PC机CAN通信调试软件,满足设计要求。

图2 系统通信原理图
2.2 DSP与CAN总线接口设计
由于TMS320LF2407A已经内嵌了CAN模块,因此,只需要一个CAN收发器就可以与其它CAN节点进行通信。在本设计中,CAN收发器选用PCA82C250[9]。 为 CANTX、 CANRX 端 口 与PCA82C250之间通过两个高速光耦6N137进行隔离[10-11]。6N137 的传输速率可达 10 Mb/s,完全满足CAN总线的传输速率要求,并且可以大大提高系统信噪比[12]。由于CAN总线驱动为电流型,总线间必须有终端电阻,一般取120Ω,为防止波形反射,终端电阻应并联在CAN收发器的CAN_H与CAN_L两端之间[13]。综上,硬件原理图如图3所示。
3 软件设计
CAN通信模型的三层结构为物理层、数据链路层和应用层。在CAN2.0B协议中只规定了物理层和数据链路层。因此系统软件设计主要集中在应用层上,包括CAN通信协议设计、CAN控制器的初始化、数据的发送接收程序以及主程序设计[14]。
3.1 CAN通信协议设计
CAN2.0B协议下,CAN总线具有标准帧和扩展帧两种不同的帧格式。标准帧的标识符为11 bit,扩展帧的标识符为29 bit。值得注意的是,标识符的高7 bit不能全为1。当CAN节点发送产生竞争时,按照位仲裁的方式确定优先级。如果标准帧和扩展帧出现冲突,标准帧优先于扩展帧。为了保证传输效率,本设计采用标准帧进行传输,4个DSP内嵌CAN模块的标识符设置如表1所示。

图3 DSP与CAN总线接口硬件原理图

表1 标识符设置
3.2 CAN 控制器的初始化[4]
CAN控制器在使用前必须进行初始化。首先要把复用I/O口IOPC6/CANTX和IOPC7/CANRX配置成CAN通信发送引脚和接收引脚。其次是对位定时器和邮箱的配置。位定时器主要由BCR1和BCR2两个寄存器组成。BCR2寄存器定义了CAN控制器的波特率欲定标值BRP及系统时钟单位的时间量TQ,

式中,CLKOUT为系统时钟频率,本设计取40 MHz。
BCR1寄存器决定了CAN控制器的重同步方式、同步跳转宽度、采样次数、时间段1(TSEG1)和时间段2(TSEG2),并与BRP值共同决定CAN通信波特率B的大小,

式中N=(TSEG1+1)+(TSEG2+1)+1,表示1位信息所占用的TQ数。综上,本设计定义:
*CANBCR2=0x0013;
*CANBCR1=0x0061。
将CAN控制器配置为下降沿重同步,同步跳转宽度配置为0,采样次数配置为1。CAN通信波特率在以上设置下为125 kb/s。在同一CAN总线进行通信的节点必须保证波特率和位长度都相同[15]。因此本设计中所有CAN节点的位定时器配置都是相同的。具体配置可按图4所示的流程图进行。

图4 初始化位定时器
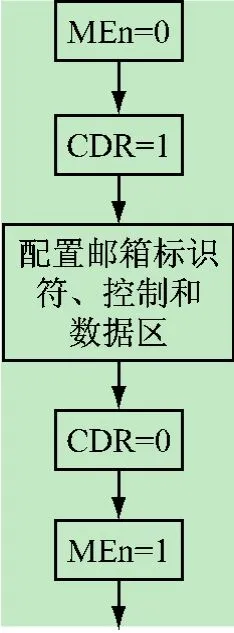
图5 初始化邮箱
图5 是邮箱的初始化流程图。主要包括邮箱标识符的设置、中断优先级、控制、工作模式以及数据长度的选择。在配置邮箱前必须先禁止邮箱并置数据域改变请求位CDR为1,配置完成后对CDR位清零并使能邮箱进入正常工作模式。邮箱的配置则需要根据设计需要进行。
3.3 发送邮箱和接收邮箱的配置
由于TMSLF2407A中AD转换器为10 bit。电压、电流、功率各需要占用2 Byte的存储空间。因此,定义所有邮箱的数据长度为6 Byte。设置DSP_DC的邮箱4作为发送邮箱。DSP_A、DSP_B、DSP_C的邮箱0为接收邮箱,并设置其AME位为0,进行严格的标识符匹配,此时本地接收屏蔽寄存器将失效。将邮箱4作为发送邮箱。在DSP_A、DSP_B、DSP_C中,禁止邮箱发送中断,打开邮箱接收中断,中断优先级设置为低优先级。图6和图7分别是邮箱发送程序和接收程序的算法流程图。

图6 发送流程图

图7 接收流程图
3.3 主程序设计
主程序的流程图如图8和图9所示。本设计根据MPPT的采样周期每隔一段时间由DSP_DC主动向DSP_A、DSP_B、DSP_C各发送一帧数据,包含数据采集模块采集到的实时直流电压、电流和功率。在DSP_DC中,使能定时器1周期中断,定时周期为1ms,发生周期中断时,进入中断服务子程序使能邮箱4发送采集到的数据。在DSP_A、DSP_B、DSP_C中,首先设置标志位FLAG用于启动邮箱4发送数据。当邮箱0接收到一帧数据时,将标志位FLAG置1。同时,主程序不断查询FLAG的值,当FLAG=1时,邮箱4读取邮箱0接收到的数据并向PC机发送,发送完毕后将FLAG置0。
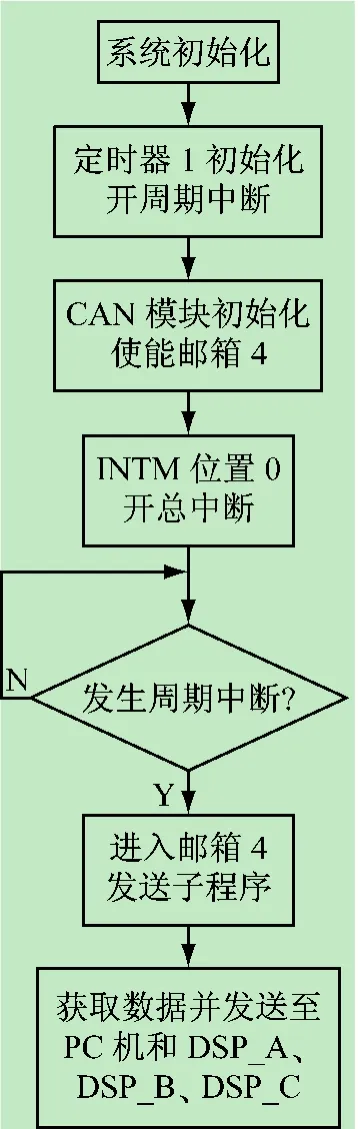
图8 DSP_DC主程序流程图
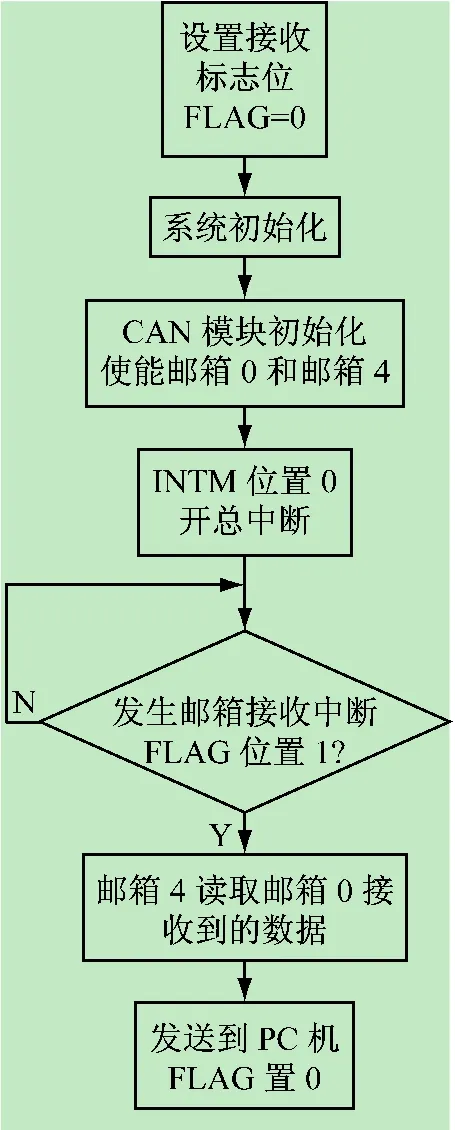
图9 DSP_A、B、C 主程序流程图
4 实验结果与结论
在PC机调试软件中,设置串口波特率设置为9.8 kb/s,CAN总线传输速率为125 kb/s。调试软件以16进制的方式显示接收到的报文标识符。DATA0~1中存储的是AD转换器采集到的直流侧电压信号数据,DATA2~3中是电流信号数据,DATA4~5中是功率信号数据。DATA6~7未使用,调试软件默认以0代替。实验结果如图10所示,从实验结果可以看出,DSP_DC发送的数据能迅速并且准确无误地被其余3个DSP接收。本设计能高速可靠地将直流侧的电压、电流和功率信号数据传送给逆变环节进行MPPT控制,从而对输出功率进行动态调节,有利于提高控制精度,并且便于通过PC机实时快捷地监控信号传输的状况。
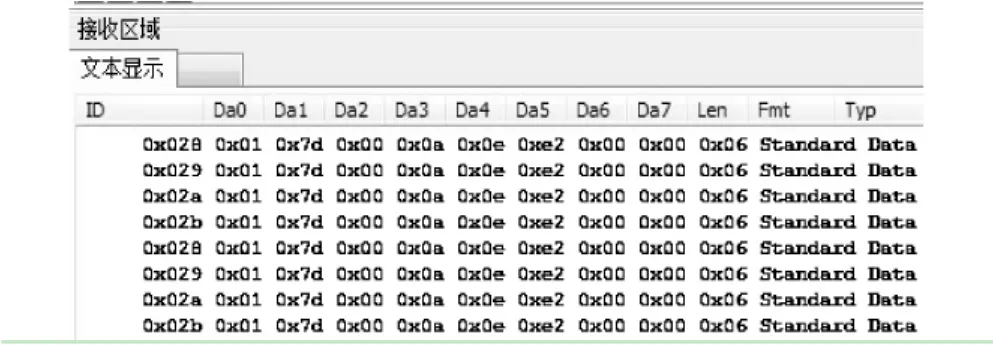
图10 通信数据
[1] 赵剑飞,姜建国.基于3台单相逆变器的三相并网系统[J].电力自动化设备,2009,29(10):59-63.
[2] 王建华,刘 磊,张方华,等.组合式三相逆变器锁相控制策略[J].电工技术学报,2010,25(8):79-84.
[3] 邓红德,王博栋,吴佳楠.基于CAN总线的双DSP通信方案设计与实现[J].测控技术,2011,30(6):83-88.
[4] 刘和平.TMS320LF240X DSPC语言开发应用[M].北京:北京航空航天大学出版社,2003.
[5] 赵 峰,夏超英,陈 骥.2407的CAN控制器在电动汽车驱动系统中的应用[J].电气自动化,2004,26(1):35-37.
[6] 秦娟英,陕周荣.CAN总线在基于DSP的逆变器并联运行控制中的应用[J].通信电源技术,2004,21(2):30-32.
[7] 岳秀梅,马学军,康 勇.基于CAN总线的大功率逆变电源监控系统设计[J].电测与仪表,2008,45(514):37-40.
[8] 饶运涛,邹继军,王进宏,等.现场总线 CAN原理与应用技术[M].北京:北京航空航天大学出版社,2008.
[9] 吴永凤,王红蕾,王俊波.CAN总线接口芯片PCA82C250及其应用[J].贵州工业大学学报(自然科学版),2005,34(3):76-79.
[10] 李 璐,张宏川,张爱玲.基于DSP的CAN总线通信的设计与实现[J].电气技术,2011,5:13-16.
[11] 彭显刚,暨绵浩,曾岳南,等.基于TMS320LF2407和CAN总线的通信应用设计[J].汕头大学学报(自然科学版):2006,21(1),76-80.
[12] 邵 晖,舒 嵘.光电隔离器6N137的特性和应用[J].电子技术,1996(2):38-39.
[13] 于 磊.基于DSP和CAN总线的分布式电源监控系统的设计与实现[D].南京:南京航空航天大学,2006.
[14] 叶琴瑜,胡天友,何 耀.基于CAN总线的光伏电站监控系统[J].仪表技术与传感器,2012(3):76-81.
[15] 王茂飞,程 昱.TMS320C2000 DSP技术与应用开发[M].北京:清华大学出版社,2007.