基于混合阻尼控制的车辆半主动悬架可调性研究*
2013-09-04郭孔辉王金珠郭耀华
郭孔辉 王金珠 郭耀华 薛 冰
(1.吉林大学 汽车仿真与控制国家重点实验室;2.湖南大学 汽车车身先进设计制造国家重点实验室)
1 前言
天棚阻尼控制作为经典的控制逻辑,由于其算法简单工程易于实现且鲁棒性较强,现已经广泛应用于中高端汽车的半主动控制系统。但天棚控制从原理上只能以降低汽车安全性来改善乘坐舒适性,而混合控制策略则在天棚控制的基础上结合地棚控制,能在安全性和乘坐舒适性之间折衷,从而使悬架的整体性能得到提升。
对混合控制策略的研究主要集中在如何使天棚、地棚阻尼系数Csky、Cgnd及阻尼分配系数α与整车进行匹配。文献[1]采用免疫优化算法对α及Csky的匹配进行了一些探讨和研究。而现代车辆悬架系统通常采用与路面和车速自适应的控制策略,这时更关注悬架的可调性[2]。为此,本文通过优化悬架参数确定了悬架刚度ks和Csky及Cgnd,使混合控制策略下车辆半主动悬架有一个合适的可调范围。通过改变参数α使车辆的平顺性和安全性相对于被动悬架有所改善。
2 悬架模型的建立
2.1 路面输入
分析悬架性能时首先要用到路面的随机输入。当车速为定值时,速度的时域功率谱即为白噪声信号[3],本文采用积分滤波白噪声法产生C级随机路面作为输入。
式中,xr为路面垂直方向位移;n0为参考空间频率,n0=0.1m-1;Gxr(n0)为路面不平度系数;v0为汽车行驶速度;ω(t)为单位白噪声;f0为下截止频率。
在Simulink环境下采用积分滤波白噪声法产生如图1所示C级随机路面。
2.2 1/4车辆悬架简化模型
在研究基于天棚、地棚半主动悬架混合控制策略时,采用如图2所示的1/4车辆悬架简化模型,即忽略了轮胎阻尼,用定刚度的弹性元件来近似代替轮胎。其中,mb为簧载质量,mw为非簧载质量,ks为悬架刚度,kt为轮胎刚度,c为悬架阻尼系数,z0、zw和zb分别为路面输入、轮胎和车身的垂直位移。
由牛顿第二定律得到2自由度1/4车辆悬架垂向运动微分方程:
实际上理想的天棚、地棚阻尼器不存在,半主动悬架簧载和非簧载质量之间通过一个CDC(Continuous Damping Control)减振器来衰减振动。图3为实际1/4车辆半主动悬架2自由度简化模型,其中cs为CDC减振器阻尼系数。
由牛顿第二定律得到其运动微分方程:
3 混合控制策略的实现
混合控制策略综合天棚控制策略和地棚控制策略,使车辆舒适性和安全性都得到了改善。混合控制策略的基本思想是在簧载质量和非簧载质量上加一个与惯性系链接的阻尼器,产生的阻尼力分别与车身和轮胎的垂直运动速度成正比,能起到同时衰减车身和轮胎振动的目的。
由于理想的惯性系不存在,因此只能以天棚、地棚模型为指导,结合半主动悬架的CDC减振器可调范围来研究一种混合控制算法,通过调节阻尼系数使减振器产生的阻尼力同时与车身和轮胎绝对速度成正比,从而使车辆的舒适性和安全性都能得到改善。
本文采用一种连续的混合阻尼控制策略,控制算法如下:
式中,Cs、Cg为实际天棚、地棚阻尼系数;Csky、Cgnd为理想天棚、地棚阻尼系数;Cmax、Cmin为CDC减振器可调的最大、最小阻尼系数。
通过调整阻尼分配系数α,可改变天棚控制力和地棚控制力在混合控制策略中所占的比重,使汽车能够根据实际行驶工况和路面变化来改变悬架的阻尼控制规律,保证了悬架在任何工况下的最优性能。
4 悬架参数匹配
4.1 悬架刚度的匹配
在被动悬架中,弹簧刚度和减振器阻尼系数固定不变,因此设计被动悬架时,只需根据实际要求在车辆舒适性和安全性之间取一个折衷[5]。而基于混合控制策略的半主动悬架,如果悬架参数选择不当,则会使车辆的舒适性或安全性可调范围很小,甚至会导致某一方面的恶化。因此,在半主动悬架的设计过程中,悬架的参数选择非常重要。
根据1/4车辆的垂向运动微分方程 (2)、方程(3)和混合控制算法公式(4),在 Simulink 环境下搭建了1/4车辆的被动悬架和半主动悬架模型,并采用上述积分滤波白噪声法产生的C级随机路面作为输入。仿真结果将车身加速度z¨b、悬架动挠度zw-zb及车轮动载荷Fd输出到Matlab工作空间做性能分析。悬架的基本参数如表1所列,其中减振器阻尼为被动悬架阻尼,悬架刚度为待优化值。
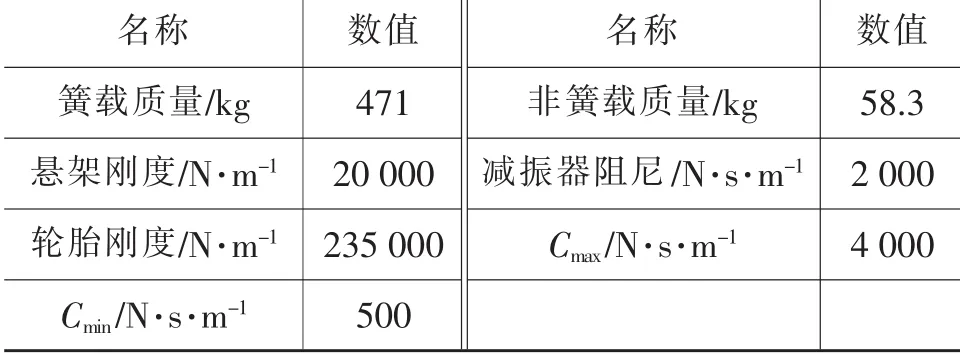
表1 被动/半主动悬架模型主要参数
考虑到在各种行驶工况下对汽车平顺性的不同要求,首先建立如下目标函数:
式中,q为权系数,取值大时趋近于平顺性,取值小时趋近于安全性;i起比例调节作用,使汽车的安全性和平顺性评价指标达到同一数量级便于比较;N为采样数据长度。
为分析悬架刚度对平顺性和安全性可调范围的影响,将悬架刚度ks和阻尼分配系数α视为两个独立的变量,ks和 α 分别从5000~30000 N/m和0~1之间分为若干等份,将ks和α进行多次赋值,每赋值一次进行一次仿真。在分析平顺性可调范围时令q=1,分析安全性时令q=0。半主动悬架和被动悬架的目标函数值之差H=JS-JP为悬架的改善系数,当H<0时悬架相应性能得到改善。本文将ks和α都分为50等份,经过2500次仿真得到2500个H值并绘制H特性图。H特性图显示了在不同ks值下,悬架在α值从0~1改变时其平顺性Hr和安全性Hs的变化特征及范围。
图4和图5为α变化时Hr-ks和Hs-ks特性曲线,图4自上向下α从1~0逐渐减小,ks取值在22500~29000 N/m之间时平顺性可得到比较明显的改善,且α=0时平顺性变化较小;图5自上向下α从 0~1逐渐增大,当 ks在22500~30000 N/m 变化时安全性改善比较明显,且α=1时安全性变化较小。
ks的取值要使在α变化时安全性和平顺性相对被动悬架都能得到改善,且当平顺性最好时安全性变化较小,安全性最好时平顺性变化较小。图5显示当ks>22500 N/m时,增大ks可使安全性变好;图4显示当ks>26000 N/m时,平顺性随着ks的增加逐渐变差。本文优先考虑平顺性,因此ks比较理想的取值为26000 N/m。
4.2 Csky、Cgnd的匹配
在确定Csky、Cgnd时,本文首先由经验公式C=给Cgnd初步取一个值,其中,C为理想天棚(地棚)阻尼系数,m为簧载(非簧载)质量,k为悬架(轮胎)刚度。然后对Csky从500~10000 N·s/m每隔500 N·s/m分段赋值,分析悬架Hr和Hs在α从0~1之间取值时的变化[7]。
由经验公式 Cgnd=并带入悬架参数可得到理想地棚阻尼系数Cgnd的初始值CG=3701.4 N·s/m。
图6为Csky取不同值时悬架的Hr特性图,可看出Csky变大时悬架Hr曲线逐渐改善,即α=1时悬架平顺性改善较好。从图6、图7可以看出,当Csky>4500 N·s/m时悬架Hr和Hs曲线几乎不再变化。本文Csky取临界最大值4500 N·s/m。
分析 Cgnd时,取 Csky=4500 N·s/m, 对 Cgnd从500~10000 N·s/m每隔50 N·s/m分段赋值。图8和图9显示,随着Cgnd增大悬架Hr和Hs特性都逐渐变好,但当 Cgnd>6000 N·s/m 时 Hr、Hs曲线几乎都不再变化。因此Cgnd取临界最大值6000 N·s/m。
4.3 参数验证
根据以上确定的参数,在simulink环境下建立基于混合控制策略的车辆半主动悬架模型,路面输入采用白噪声积分法产生的C级随机路面,车速为40 km/s[8]。图10为α=1时半主动悬架与被动悬架的车身加速度对比,图11为α=0时半主动悬架与被动悬架非簧载质量加速度对比,图12显示了平顺性指标Hr随α的变化曲线,图13显示了安全性指标Hs随α的变化曲线。Hs-α曲线同时也说明使安全性指标Hs最好的α值不一定是0。本文大概在α=0.5时安全性达到最好。
从以上仿真曲线来看,根据实际路况调整α可以快速实现使车辆倾向于平顺性或倾向于安全性,因此不管车辆行驶在何种路面或工况,都能始终保持车辆驾驶性能最佳。
5 结束语
讨论了基于混合控制的车辆半主动悬架可调性与悬架刚度、理想天棚地棚阻尼系数的关系。把悬架簧载质量加速度和悬架动挠度的加权加速度均方根值作为平顺性指标,非簧载质量加速度均方根值作为安全性指标,通过simulink仿真得到在α变化时K、Csky和Cgnd取值对悬架可控范围的影响。经分析对比Hr、Hs特性图,最终确定了与本车参数相匹配的K、Csky和Cgnd,确保了车辆可根据实际车速和路况通过改变α来选择倾向于平顺性或安全性。
1 殷智宏,郭孔辉,宋晓琳.基于辨识模型的半主动悬架控制策略研究.湖南大学学报,2010,37(12):1~10.
2 喻凡,郭孔辉.车辆悬架的最优自适应与自校正控制.汽车工程,1998,20(4):1~9.
3 ESLAMINASAB N,GOLNARAG HIF.A semi-active control strategy for vibration isolation to improve the ride comfort of vehicle.International Journal of Modelling,Identification and Control,2009,7(3):281~293.
4 严天一,刘大维,师忠秀,等.基于基于地棚控制的半主动悬架车辆道路友好性仿真.农业机械学报,2007,38(1):12~16.
5 余志生.汽车理论.北京:机械工业出版社,2009.
6 赵研,寇发荣,方宗德.汽车天棚控制半主动悬架模型仿真与性能分析.计算机仿真,2006,23(11):233~236.
7 顾信忠,张铁山.减振器阻尼比的确定.农业装备与车辆工程,2010,19(12):28~31.
8 中国国家标准局.GB/T 4970-2009.汽车平顺性试验方法.北京:中国标准出版社,2009:1~16.
