四足机器人步态时间顺序分析
2013-08-26武海明王学友
杨 智,张 伟,武海明,王学友
(兵器工业卫生研究所,陕西 西安 710065)
0 引言
机器人技术的发展是一个国家高科技水平和工业自动化程度的重要标志和体现。机器人技术是综合了计算机、控制论、机构学、信息与传感技术、人工智能和仿生学等多学科而形成的高新技术,集成了多学科的发展成果,代表了高技术的发展前沿,是当前科技研究的热点方向[1]。随着计算机技术、传感器技术的发展,国际上移动服务机器人的研究与开发速度明显加快,同时人们也注意到移动机器人的优越性[2],如在核工业、化工行业代替工人进行检测、检查;在办公室、医院、宾馆和家庭等从事服务;对建筑、大型船体、罐体进行清洗;在有毒环境下进行自动焊接作业;用于未知星球表面的探测等[3]。
(4)压滤机。由表3可知,压滤机入料量为109.06 t/h,此处系统能力按入料量计算,原设备的负荷能力是10 t/h×6=60 t/h,压滤面积1 910 m2,单位面积处理能力为60 t/1 910 m2=0.0314 t/m2,所需压滤面积为:1.25×109.06/0.0314=4 342(m2),因此应在原来基础上再增加2 432 m2的压滤面积,即增加6台450 m2压滤机才能满足现有生产需求。
四足步行机器人是模仿四足动物运动形式,采用腿式结构来完成多种移动功能的一类特种机器人。步态是四足步行机器人的一种迈步方式,是步行机器人各条腿协调运行的规律,即各条腿的抬腿和落腿顺序[4]。在此,研究了四足机器人在1个步态周期内四条腿的时间顺序问题,就是四条腿占地时间在步态周期内的分布问题。
1 时间顺序分析的方法
由于机器人的步态有规则步态和非规则步态之分,又有对称步态和非对称步态之分。对称步态是指机器人前双腿和后双腿中双腿在着地时间上相等,则机器人的这种步态被称为对称步态[5]。
规则对称步态可以分为3种:慢爬行步态、对角小跑步态和同侧小跑步态。每一种步态都有不同的时间顺序问题。
观察自然界的各类四足动物运动,可以发现,大部分大型肢体动物都是按照1423的抬腿顺序来行走,如图1所示。分析原因是这种抬腿次序在静态慢爬行时,具有最少的重心调整量,并且这样的步态的效率也是最高的。因此,选择这种抬腿次序的四足机器人稳定性最好。
6.4 自查自纠。倡导学校组织由学校师生及学生家长代表组成的食品安全检查员队伍,定期对食堂和集中就餐场所开展检查和测评。应将自查结果及整改情况及时向学校师生及家长公示。

图1 四足机器人慢爬行步态1423抬腿次序
不断强化长江流域大型生产建设项目水土保持监督检查。对2010—2012年部批在建的139个项目进行全面监督检查,加强对丹江口库区及上游水土保持二期工程等项目的技术指导。组织开展流域农村水利数据建设用户需求分析及数据框架建设,实施流域大中型灌区配套改造调研。加强水利安全监督工作,认真完成水利部委派的水利稽察任务,积极开展委属工程建设项目稽察工作。
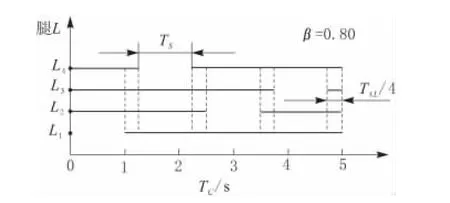
图2 β=0.80下慢爬行步态各腿时间顺序分布
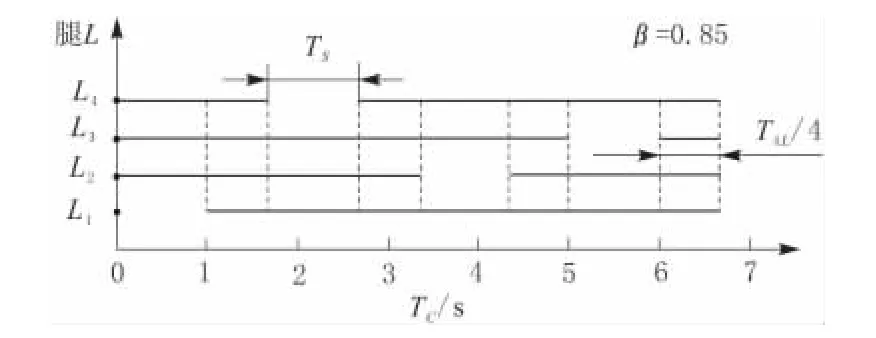
图3 β=0.85下慢爬行步态各腿时间顺序分布

图4 β=0.90下慢爬行步态各腿时间顺序分布

图5 β=0.95下慢爬行步态各腿时间顺序分布
这样,一个步态周期中,每一条腿的时间顺序分布就通过式(1)被确定下来。
用上面建立的方法,可以画出一个步态周期内,机器人四条腿的时间分布状况。现在只是需要把具体的抬腿次序扩展到任意的抬腿次序,这就能使慢爬行步态的时间分布对不同的抬腿次序有了普遍性。因此,可得到慢爬行步态时间顺序分布如图6所示。
2 慢爬行步态时间顺序分析
视察讲话振人心,改革开放方向明。习近平总书记在改革开放40周年、粤港澳大湾区建设全面推进的关键时刻,再次亲临广东视察,及时为广东工作把舵定向,充分体现了习近平总书记对广东工作的高度重视和大力支持,以及对广东人民的亲切关怀,为广东新时代改革开放再出发进一步指明了前进方向、提供了根本遵循。习近平总书记的重要讲话,也是对全国高举新时代改革开放旗帜、把改革开放不断推向深入发出的动员令和宣言书,具有重大的政治意义、现实意义和深远历史意义。
对角小跑步态是指机器人处于对角线上的两组腿交替运动的状态,或者同时是支撑状态,或者同时是运动状态,处于支撑状态和运动状态的时间是相同的,而此时占地系数β=1/2。同样的,用前面的方法继续分析对角小跑步态的时间顺序分布问题。虽然前面的整个分析都是在β>3/4的慢爬行步态下,它的模型建立也是这种状态下的,但因为对角小跑步态也是一种规则对称步态,所以,可以继续用慢爬行步态的模型建立对角小跑步态的时间顺序分布模型,只是需要调整某些参数。在β=1/2时,机器人仅有两条腿同时处于支撑态,在整个步态周期TC内,每条腿的占地时间和抬腿时间都占TC/2,由于两组腿相互交替,所以两组腿的相位刚好相差半个TC周期,而在慢爬行步态中存在的四足支撑时间T4L在这种步态下等于0。由此可以比较容易得出各腿在1个周期内的时间顺序分布,如图7所示。

图6 慢爬行步态时间顺序分布
图6中着色的部分是每条腿占地时间,空白部分是抬腿时间。1,2,3,4分别为抬腿的次序,并不代表具体的某条腿;t1,t2,t3,t4分别为每条 腿 的 落地时间点;t11,t22,t33,t44分别为每条腿的抬腿时间点。图6中所选择的占地系数β=0.80,如果选择其他β值也可以,因为从前面的分析中已经知道不同的β值只是影响TC和T4L的数值,因此,只要这2个变量确定再加上β值,就能确定各个时间点。根据以上分析,可以求得这8个时间点的值:

从图2~图5可以看出,当选择1423抬腿次序时,随着β的增大,每一条腿的占地时间都在变长。为了使T4L分配在每条腿的时间有序合理,设T4L在整个步态周期TC内平均分为4部分。这样,在每一次有一条腿落下后,都有一个四足支撑时间T4L/4,使机器人的每条腿在整个步态周期TC运动时间分布都是相同的,不同的只是每条腿间有时间差。用此方法来分析慢爬行步态、对角小跑步态和同侧小跑步态的时间顺序问题。
占地系数是指机器人每条腿接触地面(即处于支撑相)的时间和1个步态周期的比值。占地系数β对四足机器人四条腿在1个步态周期TC的分布如图2~图5所示。分布图是基于慢爬行步态下选定的1423抬腿次序,以及所设定的每条腿抬腿时间TS值所计算好的TC值和T4L值。可以作出图2~图5几个不同β值下的慢爬行步态时间顺序。
3 对角小跑步态时间顺序
据不完全统计,全国约有23.4%的乡镇水利站作为县(市)水利局的派出机构,或实行县(市)乡“双重管理,以条为主”管理,纳入财政预算;约36.69%的乡镇水利站由乡镇管理;约24.81%的乡镇水利站机构被撤销并入到乡镇农业综合服务中心(站)。全额拨款型比重最高(58.62%),差额拨款型、自收自支型与企业型分别占总量的24.40%、16.78%及0.20%。经费来源上,自筹经费占总经费的90.81%,以办公费用为主(占自筹经费总额的87.18%);而财政拨款仅占总经费的9.19%,其中56.08%为前期费用。

图7 对角小跑步态时间顺序分布
图7中腿次序是指每一条腿的具体编号,即1代表左前腿,2代表右前腿,3代表左后腿,4代表右后腿,与图6的抬腿次序含义并不一样,其他各点t1,t2,t3,t3,t11,t22,t33,t44的含义同图 6 是一样的。图7中着色部分是每条腿的占地时间,空白部分是抬腿时间。根据对角小跑步态的特点,计算这8个时间点的值分别为:

可以看到,只要确定整个步态周期TC,就能完全确定每个时间点的值,也即对角小跑步态的时间顺序分布通过式(2)被确定下来。
4 同侧小跑步态时间顺序
同侧小跑步态是指机器人处于同一侧的两组腿交替运动的状态,或者同时是支撑状态,或者同时是运动状态,处于支撑状态和运动状态的时间是相同的,而此时占地系数β=1/2。同分析对角小跑步态的方法类似,在β=1/2时,机器人仅有两条腿同时处于支撑态,在整个步态周期TC内,每条腿的占地时间和抬腿时间都占TC/2,由于同侧两组腿相互交替,所以两组腿的相位刚好相差半个TC周期,T4L同样等于0。通过上述同侧小跑步态的特点,可得时间顺序分布如图8所示。

图8 同侧小跑步态时间顺序分布
图8中腿次序与图7的含义一样,点t1,t2,t3,t3,t11,t22,t33,t44的含义依然同图6是一样的。图8中着色部分表示每条腿的占地时间,空白部分表示抬腿时间。由同侧小跑步态的特点,计算这8个点的值为:
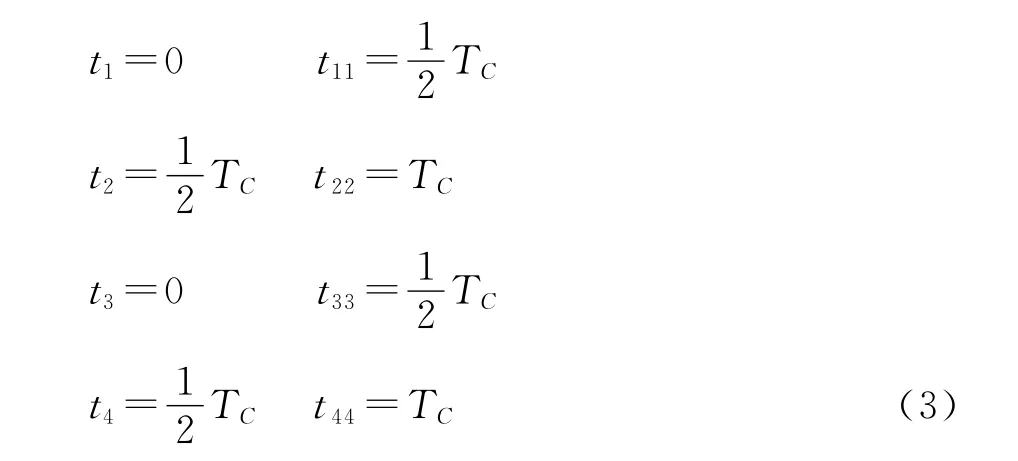
可以看到,与对角小跑步态一样,只要确定整个步态周期,就能完全确定每条腿的相应时间点的值,也即同侧小跑步态的时间顺序分布通过式(3)被确定下来。
5 结束语
通过对四足机器人3种规则对称步态时间顺序分析研究,了解到四足机器人在不同规则对称步态下,各条腿在任意时间点的运动状态只与占地系数β和步态周期TC相关,只要确定了这2个参数,就可以计算出某一时间点某条腿的运动状态。为此,将四足机器人单个步态周期内的各条腿时序图绘制出来,可用于判断各个时间点某一条腿的运动状态。
[1]张 毅,罗 元,郑太雄.移动机器人技术及应用[M].北京:电子工业出版社,2007.
[2]张福学.机器人技术及其应用[M].北京:电子工业出版社,2000.
[3]陈学东,孙 翊,贾文川.多足步行机器人运动规划与控制[M].武汉:华中科技大学出版社,2006.
[4]余联庆.仿马四足机器人机构分析及步态研究[D].武汉:华中科技大学,2007.
[5]王鹏飞.四足机器人稳定行走规划及控制技术研究[D].哈尔滨:哈尔滨工业大学,2007.
