基于标称模型的机电执行机构故障建模与仿真
2013-08-26高智刚
周 军,李 朋,高智刚,李 强
(西北工业大学精确制导与控制研究所,陕西 西安 710072)
0 引言
电动执行机构作为多数导弹、航天器等飞行器控制系统输出指令的最终执行部件,其可靠性往往决定了飞行任务的成败。因此,高可靠性电动执行机构多采用冗余结构,并要求具有故障诊断和容错能力。系统故障及容错理论一般包含故障建模、故障诊断、故障分离以及容错决策和评价等内容。目前,有关系统故障诊断与容错设计已进行了大量的研究并取得了众多理论成果,然而关于故障机理分析及故障数学建模理论却有待进一步研究[1]。
在系统故障诊断中,故障知识的获取一直是研究的瓶颈和难点之一。对于执行机构等实际物理系统,通过实验获取的故障经验知识覆盖面小、认识不深入且代价较高。而通过故障建模,能够建立起故障模式与故障表征之间的映射关系,建模结果可用于故障征兆信息的提取,并能形成故障知识专家库,从而为故障诊断和预测服务[2-3]。
鉴于此,以电动执行机构伺服系统为研究对象,详细讨论系统的故障建模原理及方法,并进行仿真分析,为后续故障检测与容错研究提供必要的故障数学描述和分析基础。
1 基于标称模型的故障建模原理
系统潜在的故障形式千差万别,但为了使系统故障建模有规则可循,有必要按一定的机理对故障进行归纳与总结。不论何种故障,对系统状态的影响主要表现在以下3方面[4-5]:
a.导致系统原始参数变化,使系统性能下降,例如放大器增益失准、电机退磁引发增益下降等。
b.导致系统内部及输出信号的非线性变化,使系统信号产生畸变但功能尚未完全丧失,如传感器线性度变差、硬件连线接触不良等。
c.导致系统功能完全丧失而进入由故障主导的信号模式,如传感器短路、开路和减速器卡死等。
前2类称之为弱故障,第3类称之为强故障。弱故障发生时系统仍能实现部分功能,而强故障发生时系统表现出彻底的故障状态。通常,系统标称模型用状态空间表示为:

x(t)∈Rn为状态向量;u(t)∈Rp为控制向量;y(t)∈Rm为观测或输出向量;A,B和C为相应维数的常数矩阵。当故障发生时,系统状态空间模型改变为:

d(t)∈Rl为系统未知扰动;fa(t)∈Rg为故障对系统输入、状态或参数的影响函数;fs(t)∈Rq为故障对系统输出或观测的影响函数;E,G和Q为相应的故障分配矩阵。式(2)即为系统的故障模型。
可见故障对系统的影响途径是确定的,所能引起系统输出变化的形式也是可以预知的。因此,能够对故障的作用机理进行抽象,从而获得一般性的故障建模方法。
考虑单输入单输出系统,正常状态下其标称模型可以采用传递函数描述,输出表达式为y=G(s)u。那么,根据以上分析,系统故障模型的输出可以表示为:

G(s)为标称数学模型;ΔG(s)用于描述由故障引起的系统参数的变化以及未建模动态等;f1(t)用来描述串入到系统中的故障因素,可以是增益、线性、非线性函数;g1(t),g2(t)用来表示外界干扰、故障参数输入和模型内外引入的变化等。
2 机电执行机构标称模型
机电执行机构是一种高精度的位置伺服系统,它是航天器等飞行器上各种电控机械运动的最终执行机构。机电执行机构用于操纵航天器的帆板和机械臂、飞行器的舵面等,使之按照所给出的控制指令进行偏转,基本结构如图1所示。
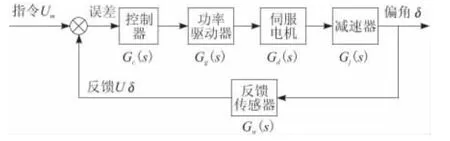
图1 机电执行机构的结构
根据图1,机电执行机构按功能由5部分组成,描述如下。
a.控制器。采用模拟电路搭建,接收飞行器控制单元指令和机构的位置反馈信号,执行控制算法,以占空比形式输出控制量。
b.功率驱动器。由H桥电路构成,根据占空比大小输出对应幅值的电机驱动电压,因此,功率驱动器可被认为是一饱和环节,其上下限即为外加功率电压的幅值。
c.伺服电机。采用永磁直流电机。若以电机转角为输出,近似可用一个二阶环节来描述,传递函数为:

Km为电机的传递系数;τm为机电时间常数;ω(s)为电机角速度;ϑ(s)为电机输出角度;uv(s)为电机绕组两端的电压。
d.减速器。考虑减速器传动间隙,可采用比例环节加延迟环节来表示。
e.反馈传感器。多采用塑料电位器,将执行机构的角位移转化为等比例的电压量,传递函数用比例环节描述。
由以上分析,某执行机构的标称数学模型如图2所示,闭环回路的放大系数为K=δ/Um=3°/V。

图2 机电执行机构标称数学模型
3 机电执行机构故障建模
3.1 控制器故障模型
控制模块用来实现位置误差量的计算以及控制量的产生,主要物理组成部件为运算放大器。因此,控制模块的故障类型主要包括:①放大器输出饱和;②放大器增益失准;③放大器接触不良。
设控制器仿真模型传递函数为Gc(s),正常状态下控制器输出为:

Ue为输入误差量;uc为控制器输出量。那么故障条件下控制器的输出可表示为:

const为控制器输出饱和,与其输入信号和输出信号都不相关;ΔG为描述放大器增益失准的系数;f1(t)为描述接触不良的函数,由随机0/1函数表示。
3.2 功率模块故障模型
功率模块的故障主要出现在H桥功率放大电路部分,主要包括:①功率管开路;②功率管短路;③功率电压异常;④引出线接触不良。
功率模块的标称模型为电压双边限幅环节,所以在其故障数学模型上主要表现为对限幅形式的影响。设该模块标称模型输入为uc,输出为uv,限幅环节表示为:

umax(=-umin)为系统外加功率电压幅值。
设故障时功率模块输出为uv′,则在故障发生时功率模块的模型可分别表示为:
故障①,考虑单支功率管发生开路,有umin=0或umax=0,uv′=uv。
故障②,短路致使绕组两端电压为零,即uv′=0。
故障③,电压异常时有
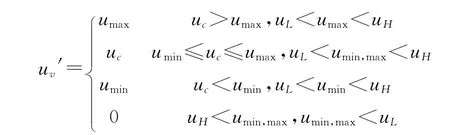
uH和uL分别为系统能正常工作所允许的最低和最高电压。
故障④,uv′=uv·f1(t),f1(t)为取值是0/1的随机函数。
3.3 电机故障模型
根据经验,电机故障主要有3类:①磁钢退磁;②绕组短路;③绕组开路。故障①会引起电机的增益降低,性能下降;故障②和③将导致电机绕组两端电压为零,从而使电机停止工作[6]。
设正常情况下电机模型为Gd(s),那么故障条件下电机故障模型可表示为:

ΔGd为电机增益、时间常数等参数的改变。
3.4 减速器故障模型
在运行过程中其减速器可能出现的故障主要有:①机械间隙增大;②机械卡死;③结构断裂。故障①是由于系统长时工作造成传动磨损或打齿,导致系统延迟增大、性能下降;故障②发生时减速器角度输出将保持在故障时刻的位置,无法跟随指令变化;故障③发生时,减速器内部机械结构受破坏输出轴悬空,角度将不再受指令控制而随外界负载变化。
设原功能单元机械延迟环节为h(s)=e-τs;故障①发生后延迟增大τ′,则故障后延迟环节变为:

若该功能单元角度输出函数为δ(t),在故障②情况下的角度输出变为:

t1为故障②的发生时刻。
故障③情况下的角度输出变为:

t2为结构断裂故障发生时刻;g1(t)为故障发生之后角度的变化规律,由外部负载决定。
3.5 传感器故障模型
采用塑料薄膜电位器时,可能产生的故障包括:①输出与电源短路;②导电薄膜部分脱落;③引线接触不良;④磨损。
位置传感器在正常情况下表现为线性比例环节,即Uf(t)=K·δ(t),K 为传感器的比例系数。故障①导致传感器输出不随角度变化,表现为恒值;故障②和③属于非线性影响,导致传感器输出变为Uf′(t)=f1(t)·K·δ(t),其中,f1(t)表示接触不良的0/1随机函数;噪声增大后传感器输出变为Uf2(t)=Uf(t)+N(t),N(t)为附加的噪声信号。
4 仿真与分析
机电执行机构在正常情况下的位置输出曲线如图3所示。系统指令信号为±5V,0.2Hz的方波,对应产生±15°的角度输出。从图3可以看出,系统跟踪良好、反馈波形平滑、稳态误差小。

图3 无故障系统跟踪曲线
功率模块某一功率管开路故障下,伺服系统跟踪曲线如图4所示。伺服电机采用H桥电路驱动,功率管的开路使得电机电流只能单方向流动。从反馈曲线可以看出,系统输出无法跟踪负的位置指令。

图4 功率管开路故障系统跟踪曲线
位置传感器由于磨损等原因,使其输出噪声过大时系统跟踪曲线如图5所示。反馈信号噪声增大使系统波形平稳度降低,角度稳态值波动增大。

图5 传感器磨损故障系统跟踪曲线
由以上2种故障构成的双重故障发生时系统跟踪曲线如图6所示。故障导致系统输出发散、稳定性丧失,无法满足任务需求。

图6 双重故障系统跟踪曲线
5 结束语
在所提出的故障建模方法中,将系统故障研究层次定位在功能单元上,从而使故障模型具有统一表现形式,不同的只是针对不同故障所对应的描述函数。利用该方法,以电动执行机构为具体对象,进行故障建模与仿真分析。结果表明,该方法对系统潜在的各种故障具有全面的比较真实的描述能力,作为故障诊断中专家库故障知识的来源,具有较好的应用价值。
[1]欧阳高翔,倪茂林,孙承启,等.航天器的故障建模与应用[J].航天控制,2011,29(5):22-29.
[2]陆雪梅,尚群立.动态控制系统的故障诊断方法综述[J].机电工程,2008,25(6):103-107.
[3]邱 浩,王道波,张焕春.控制系统的故障诊断方法综述[J].航天控制,2004,22(2):53-56.
[4]王福利,张颖伟.容错控制[M].哈尔滨:东北大学出版社,2003.
[5]Zhou D H,Frank P M.Fault diagnostics and fault tolerant control[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(2):420-427.
[6]柳新民,刘冠军,邱 静.机电系统BIT的非永久性故障分析建模与诊断[J].机械强度,2006,28(2):159-164.
