单孔腹腔镜手术机器人视觉系统设计
2013-08-26胡伯韬封海波崔贤玉付宜利
胡伯韬,封海波,2,崔贤玉,付宜利,吕 毅
(1.哈尔滨工业大学机电工程学院,黑龙江 哈尔滨 150001;2.哈尔滨工业大学电气工程及自动化学院,黑龙江 哈尔滨 150001;3.西安交通大学医学院第一附属医院肝胆外科,陕西 西安 710061)
0 引言
近年来,单孔腹腔镜手术(LESS)得到了越来越多的应用,有专家指出这种手术是微创外科手术(MIS)的发展方向之一[1]。目前,国外对单孔腹腔镜手术视觉平台做了许多研究[2-8]。单孔腹腔镜手术首先在腹壁上开孔,将手术器械经由这个孔放入患者腹腔内。这种手术减少了患者的创口数量,对患者的美容有帮助。但是,目前普通微创外科手术器械在直接应用于单孔腹腔镜手术时存在不便,主要是刚性的摄像装置容易在戳卡处和其他器械产生干涉。一种新型的解决方法是将微型手术机器人放在患者腹腔内工作。这种工作方式的优点是能减少对戳卡空间的要求,减少器械冲突的发生。为此,针对单孔腹腔镜手术的需求,研制应用于腹腔内微型机器人上的视觉系统,为外科手术提供视野和照明具有重要意义。
1 视觉系统设计要求
尽管有很多研究,也取得一些成果,但是由于单孔腹腔镜手术所面临的环境复杂,手术的要求比较高,单孔腹腔镜手术机器人视觉系统仍然有很多的工作需要进一步研究。以下要求应该满足:
a.节能。因为视觉系统将要安装在腹腔内微型机器人上,由电池提供电源。所以摄像头模块的功率应该尽可能小,从而能满足连续工作一场手术时间的要求。
b.图像质量和帧率。因为该摄像头模块面向外科手术的需要,所以图像分辨率应该高于30万像素。图像传输帧率应该在25帧/s以上,以实现实时图像显示的目标。
c.照明质量。对于外科手术医生来说,在手术时需要提供明亮和光照均匀的视野。考虑到外科手术的实际情况,设定视野区域为距离摄像头10cm,边长为12cm的正方形区域。视觉系统应能在视野区域内提供最低照度为3300lx,色温高于5700K的照明。
d.系统体积。考虑到视觉系统安装在微型机器人内,视觉系统的尺寸应小于20mm×20mm×5 mm。
为了满足上述要求,视觉系统分为3个模块:
a.摄像头子模块。主要由镜头、镜头座、成像芯片及外围电路组成。其主要功能是采集图像,并将图像转换成和无线传输相匹配的格式。
b.照明子模块,主要由LED和外围电路组成。其主要功能是为摄像提供满足要求的照明。
c.无线传输子模块。分为无线发射端和无线接收端。在微型机器人内有发射端,主要由无线视频发射芯片及射频放大电路组成,用于发射视频信号。在体外有接收端,主要功能是接收视频并将视频传入显示器。
2 摄像头子模块设计
摄像头子模块设计首先需要选择合理的方案。无线视频传输的主要方案包括数字式和模拟式。其中数字式的传输方式直接传输数字格式的视频信号。该方案传输效果好,但是占用带宽大[9],以目前技术无法在小功率、小尺寸限制下,实现实时传输30万像素视频的目标。因此,视觉系统采用了模拟视频传输的方案。模拟格式传输的原理是利用摄像头产生的NTSC/PAL格式模拟信号,通过调频之后进行传输。
2.1 芯片选择
摄像芯片常采用CMOS和CCD芯片。和CCD芯片相比,CMOS芯片功耗低,集成度高,外围电路简单,较为符合功耗以及体积的设计要求,因此选用CMOS类型的成像芯片。以下列出了几种常见的能产生模拟信号输出的CMOS芯片方案,其对比结果如表1所示。
为了满足上述提出的设计要求,从芯片尺寸、分辨率以及电路设计复杂程度角度出发,最终采用比亚迪生产的BF3003芯片作为摄像头芯片。

表1 摄像头方案设计比较
2.2 镜头选择
镜头选择的步骤包括计算放大倍率、计算焦距、计算视场角和选择光圈数4步。
a.放大倍率β的确定。根据芯片手册,BF3003芯片成像尺寸为3.912mm×3.492mm。其中放大倍率β=,l为视场区域对角线长度,l′为CMOS芯片成像面积对角线长度。根据两者数值计算得到β=0.031,取β=0.035。
b.焦距计算。根据高斯公式:
像距l′为3.5mm,物距l为-10cm,计算得到焦距f′=3.38mm。
c.视场角计算。根据视场角计算公式:

x为成像区域对角线长度;f为镜头焦距。计算得到α=75.6°。
d.光圈数选择。光圈数和通光量有关。光圈数越小,透镜孔径越大,通光量越大。但是光圈数越小,造成景物观察的景深较小。综合考虑选择光圈数为3左右。根据上述计算结果,选择透镜为合盈光电有限公司生产的HPB2033_B9透镜。其光圈数为3,视场角为72°,总长为4.3mm。
3 照明子模块设计
在照明系统设计中主要工作是选择合适的LED以及LED布局方式。选择典型LED的布局方式(一种是圆周式,一种是矩形式)进行分析。
在考虑布局方式时,主要考虑布局对于最小照度以及照明均匀性的影响。因此做如下几个约束:首先,将LED布局限定在距离中心的圆内,LED布局要考虑实际空间限制,不可能离中心过远;其次,考虑光照的均匀性,光源应该至少分别沿着X轴和Y轴对称。通过这个条件,拍摄的图像左侧和右侧亮度相等,上侧和下侧亮度相等。
在进行设计时,首先分析不同布局方式对于最小照度以及照明均匀性的影响,然后分析如何选择合适的LED。
3.1 不同布局对最低照度影响
通过比较在LED数量一致的情况下,圆周型布局和矩形布局在视野范围内最小照度的值,可以分析不同布局对最低照度的影响。根据LED照明的分布公式,在圆周布局下成像区域上坐标为(x,y)的点照度为:

z为光源距视野的距离;D为布局的最外缘边缘的直径。根据上述照度公式,照度最小值点为视野平面的边缘点。确定D为12mm,x为6cm,y为6cm,z为10cm。此处光强值和LED选择有关,因为LED还没有确定,所以暂时选择日亚公司NHSW157B白色高亮LED,其光强为3cd。根据上述数据,得到2种布局的最低照度结果计算如表2所示。
从表2可以看出,不同布局方式对于光强最小值的影响非常小,可以忽略不计。

表2 不同布局照度对比表
3.2 不同布局对光照均匀性影响
光照均匀性定义为视野内最小光强和最大光强之比,其公式[10]为:
根据2种布局的分布公式,照度最大值点为x=0,y=0的点。光强最小值点为x=6cm,y=6 cm的点。根据以上的公式,计算LED数量为4~80时的光照均匀值,得到其曲线如图1所示。

图1 照明均匀性比较结果
分析图1,并结合以上所述相同LED数量情况下光强最小值接近,可以得出圆周方式布局优于矩形方式布局的结论,因此,选择圆周布局作为LED布局的方式。
3.3 LED型号的选择
在圆周布局下,选择LED需要满足最低光照条件,同时使总功率最小,即

F(I0,P0)=0为单个LED额定功率和额定光强的关系;E(x,y)为上文提到的圆周布局情况下视野内光强分布函数。根据三角函数变换公式,得到power≥K,即总功率有一个下界,这个下界和LED的功率光强比有关。P为LED的额定功0率,I0为LED的额定光强。功率光强比越小,下界越小。对于LED来说是固定的性质。因此,以功率光强比作为LED选择的指标。
综合上述考虑,最终选择日本日亚公司生产的NESW157B白色LED,其额定功率为0.155W,额定光强为6.7cd。
4 无线传输子模块设计
4.1 无线发射芯片选择
摄像头采集到的图像经过芯片处理之后输出,需要通过射频方式传输到体外。传输系统的组成如图2所示。

图2 无线传输系统
系统采用了台湾立积公司生产的RTC6701模拟视频传输芯片。这是工作在ISM频段2.4GHz的调频芯片,可以通过管脚选择来设置不同的发射频段,防止和其他频段发生冲突。但是其输出功率较小,为了能获得稳定的图像,需要设计功率放大电路对射频信号进行放大。
4.2 射频功率放大电路设计
设计放大电路工作频率为2.4GHz,放大功率为100mW。其中输入阻抗根据RTC6701的手册,为50Ω,输出为陶瓷天线,输出阻抗为50Ω。射频放大电路的设计步骤如下[11]:
a.放大电路方案选择。首先,根据导通角不同,功率放大电路设计有A类,B类,AB类以及C类。因为功率放大较小,因此采用A类放大电路进行设计。其次,射频三极管选择为恩智浦公司的BFG540射频三极管,其S参数如表3所示。

表3 BFG540S参数表
b.稳定性检验。根据稳定性检验公式,计算Δ和K 参数,计算得到 K=3.0809,|Δ|=0.6278。因此射频三极管为绝对稳定。
c.最大增益器方式设计。根据射频三极管的单向优质指数,计算得到其结果为U=0.0959,可以采用单向化设计。因此,根据单向化设计的要求,对其输入和输出阻抗进行匹配。其中,输入匹配网络中输入阻抗Γs==0.727∠-148°,输出阻抗为ΓL==0.382∠86.3°。利用Smith圆图进行阻抗匹配,得到最终的功率放大电路如图3所示。
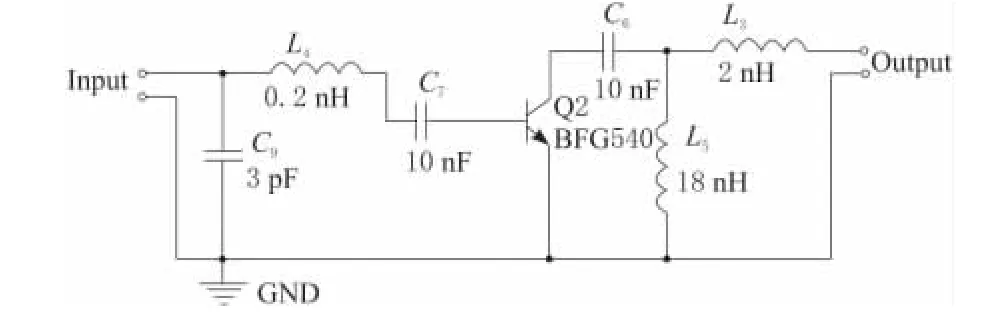
图3 放大电路
5 实验验证
根据所述的摄像头,照明以及无线传输子模块设计,完成了系统的加工。整个系统尺寸(长宽高)为12mm×17mm×6mm,满足体积要求。
为了验证实时视频传输的性能,设计了帧频测试的实验。帧频测试时采用的原理是[12]利用摄像头观察帧频测试仪上的发光二极管,通过调整发光二极管的发光时间间隔T0,逐步靠近摄像设备的曝光时间T。当n个发光二极管的发光时间间隔T0满足T=nT0时,观察到的图像为稳定的图像。否则,观察到LED在闪烁或者有运动现象。
根据帧频测试仪原理,制作了帧频测试电路板,电路板上有8个LED,利用基于STM32的主控电路板进行控制。通过主控电路上的按键,调节LED发光的时间间隔,直到利用视觉系统观察到帧频测试电路板上的LED不闪烁。
在上述条件下,LED的发光时间为4.166ms,计算得到摄像头1帧时间为33.3ms,得到摄像头的固有周期为30帧/s。通过实验证明摄像头的帧率满足设计要求。
6 结束语
随着外科手术技术的发展,对外科手术器械提出了新要求。根据面向单孔腹腔镜手术的微型机器人的要求,设计了视觉系统的摄像头模块、照明模块和无线传输模块,在设计时考虑了功耗、图像质量和照明质量的要求;实现了面向单孔腹腔镜手术的微型机器人的视觉系统,并通过帧频实验,验证了系统具有无线实时传输30万像素视频的性能。
[1]Autorino R,Cadeddu J,Desai M,et al.Laparoscopic single-site and natural orifice transluminal endoscopic surgery in urology:a critical analysis of the literature[J].European Urology,2010,59(1):26-45.
[2]Platt S R,Hawks J A,Rentschler M E.Vision and task assistance using modular wireless in vivo surgical robots[J].IEEE Transaction on Biomedical Engineering,2009,56(6):1700-1710.
[3]Cadeddu J,Fernandez R,Desai M,et al.Novel magnetically guided intra-abdominal camera to facilitate laparoendoscopic single-site surgery:initial human experience[J].Surgical Endoscopy,2009,23(8):1894-1899.
[4]Simi M,Silvestri M,Cavallotti C,et al.Magnetically activated stereoscopic vision system for laparoendoscopic single-site surgery[J].IEEE/ASME Transactions on mechatronics,2013,18(3):1140-1151.
[5]Hu T,Allen P K,Hogle N J,et al.Insertable surgical imaging device with pan,tilt,zoom,and lighting[C].International Conference on Robotics and Automation,2008.2948-2953.
[6]Swain P,Austin R,Bally K,et al.Development and testing of a tethered,independent camera for notes and single-site laparoscopic procedures[J].Surgical Endoscope,2010,24(8):2013-2021.
[7]Harada Kanako,Oetomo Denny,Susilo Ekawahyu,et al.A reconfigurable modular robotic endoluminal surgical system:vision and preliminary result[J].Robotica,2010,28(2):171-183.
[8]Castro C A,Smith S,Alqassis A,et al.MARVEL:a wireless miniature anchored robotic videoscope for expedited laparoscopy[C].IEEE International Conference on Robotics and Automation,2012.2926-2931.
[9]蔡 型,张思全.短距离无线通信技术综述[J].现代电子技术,2004,(3):65-69,76.
[10]Moreno Ivan,Averdano-Alejo Maximino.Designing light emitting diode arrays for uniform near field irradiance[J].Applied Optics,2006,45(10):2265-2272.
[11]Matthew M.Radmanesh.射频与微波电子学[M].顾继慧,李 鸣,译.北京:电子工业出版社,2012.
[12]沈阳敏像科技有限公司.手机摄像模组帧频测试仪[P].中国专利:200520092732,2006-9-27.
