基于PXIe的动物在不同表面运动力学测试系统
2013-08-26葛承滨吉爱红郭朝龙
葛承滨,吉爱红,姚 宁,顾 伟,郭朝龙,3
(1.南京航空航天大学仿生结构与材料防护研究所,江苏 南京 210016;2.南京航空航天大学机电学院,江苏 南京 210016;3.南京航空航天大学自动化学院,江苏 南京 210016)
0 引言
由于自然环境的复杂多变,许多动物在进化的过程中,形成了独特的粘附方式[1-3]。对它们运动行为和力学行为的研究[4-5],可以为仿生机器人的研究发展提供重要理论依据。目前研究动物运动和力学行为的设备主要有传感器阵列测试平台[6]、三维力测试平台[7-8]等。在此,研制了一套动物运动力学测试系统。
1 系统总体结构
数据采集过程实际上是将模拟信号转换为数字信号,然后使用计算机进行处理、显示及存储的过程,相应的系统称为数据采集系统[9]。运动力学测试系统工作的一般过程是首先利用传感器把目标动物的力学信号转化为电压信号,再通过PXIe数据采集模块对信号进行采集和处理,最后在Lab-VIEW程序中实现数据处理、显示和保存;与此同时,利用高速摄像机同步记录动物运动行为信息。力学数据和行为数据的同步采集通过单片机(AVR Mega16)触发实现[10]。测试系统结构如图1所示。

图1 系统结构
2 硬件设计
2.1 力学数据采集
2.1.1 传感器
测试系统采用的传感器是电阻应变式低通三维力传感器[11],量程为1.5N,精度可达1mN。
2.1.2 测力平台结构
测试系统的目的是测量壁虎等动物在完整运动周期内运动力学和运动行为的变化,所以目标动物应该限制在指定的运动通道内按指定的路径运动,以保证实验的成功率。先用4个传感器与底板、承力板和基板搭建了测力平台框架,在该框架的上方采用有机玻璃和平面镜设计动物的运动通道,如图2a所示。该运动通道既能够保证目标动物按照给定路线运动,又能够通过两侧与运动平面成角度的平面镜准确反映动物运动时的几何信息。在实际测量中,可以使用不同特性的薄膜作为实验表面,将其粘在承力板上,只需卸下承力板即可更换实验表面,这样可以大大减少对传感器的损伤。
为了检测试验平台的精度,在承力板表面的不同位置不同方向加载相同的载荷,并观察测试系统的输出结果。此平台的量程为1.5N,所以,在承力板上,沿X,Y,Z方向悬置50g,100g和150g砝码来检测测量误差。在承力板上选取13个点(图2b中承力板上的白点),每个点每个方向各做5次实验,施加150g时各方向的最大耦合误差如表1所示。由于各个方向的耦合误差都小于6%,所以设计满足实验要求。

图2 测力平台结构
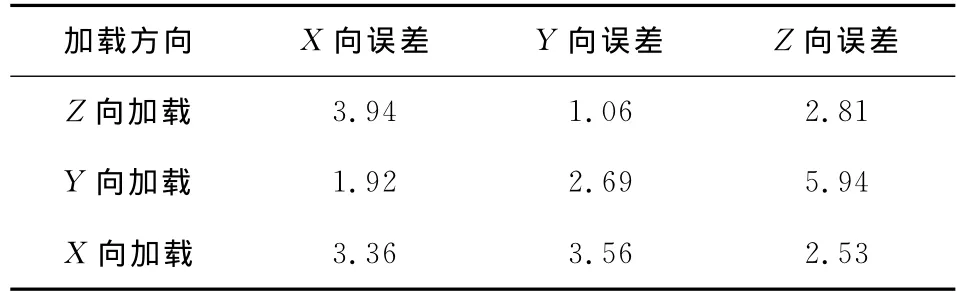
表1 测力平台不同方向上加载150 g的最大耦合误差 %
2.1.3 信号调理和数据采集模块
信号调理和数据采集是整个测试系统中最为重要的环节之一,其关键部分为数据采集卡。系统选用的是PXIe数据采集卡。
PXIe采集卡集信号调理和数/模转换为一体,采用PXIe-8130为实时控制器,用PXIe-4330为电桥输入模块,包含8路24字节同步桥接输入模块,精确度达0.02%,每通道采样率可达25kS/s。桥接输入模块采用了比例式设计,每通道24位ADC。数据采集卡封装在配有交流的18槽3U的机箱中,具有高达4GB/s系统带宽和较高的抗干扰能力。跟PCI相比,PXIe将信号调理和数据采集集于一体,有自身的控制器,实现了整个系统装置一体化,可以方便PXIe与测力平台一起实现360°旋转(需要模拟动物在不同倾斜表面上的运动);每个通道都配有专门的数模转换器,可以实现多通道同步数据的采集;安装方便,抗干扰性强。
2.2 行为数据采集
2.2.1 高速摄像机
高速摄像机型号为i-SPEED 3。实验时,通过单片机发送触发信号给高速摄像机和PXIe,实现图像数据和力学数据的同步采集。结合图像数据,可以更加准确地判断动物和测力平台的接触情况。
2.2.2 冷光源
冷光源是几乎不含红外线光谱的发光光源,具有十分优良的光学特性。当用高速摄像以较高帧数摄像时,可以调整冷光源的角度和位置,改变光照强度,而且冷光源的不发热性可以避免影响系统测试和实验动物。
3 软件设计
系统软件采用LabVIEW8.5进行编写,DAQmx驱动。
采集程序主要分为以下4个步骤:空采集、初始化、采集和停止。空采集就是程序将各通道采集到的数据以图线的形式在前面板上显示出来,不作数据处理和保存,其目的是检验传感器通道是否正常工作;初始化是记录一定数量的初始数据,求出平均值,并显示到前面板上,这个作为通道的零点输出值;进入采集模块后,通过观察动物运动情况来决定是否保存此数据;点击停止,数据采集程序结束。
LabVIEW程序用的是条件结构执行空采集、初始化、采集和停止程序。同时使用While循环控制每个具体程序,以防止出现意外情况。程序的核心为采集模块,采集模块主要包括硬件配置、数据读取、显示和保存。硬件配制时需要注意以下几点:
a.DAQmx物理通道中信息参数设置,需要与传感器和数据采集卡参数一致。
b.选择合理的采样频率可以再现原始信号。根据香农采样定理,采样频率至少应该是被测数据频率的2倍,实际中则应取到5~10倍。
c.DAQmx读取数据时,采样缓存数必须大于每个通道采样数,否则会发生数据溢出,影响程序的正常执行。
4 应用实例
使用大壁虎作为实验对象,通过运动力学数据采集系统,测试大壁虎在不同倾斜表面不同粗糙度表面运动力学信息。实验时,启动测试系统,初始化设备后,将大壁虎平稳放在测试平台通道的一端,通过人为引导,使大壁虎经过传感器测试平台爬到另一端。壁虎开始运动时,单片机发送触发信号到PXIe采集卡时钟和高速摄像机,同步力学数据和图像数据。根据采集的图像,采用图像识别的方法[12],选择大壁虎运动时方向和速度都没有显著变化的,且脚掌与测力平台接触良好的数据作为有效数据。
大壁虎在倾斜角为90°的砂纸表面爬行时力学数据如图3所示。实验结果表明,系统可以精确获得爬壁动物在不同表面运动过程中接触力学数据和运动行为,这为深入了解这类动物高稳定性的力学原因提供理论依据。

图3 力学数据曲线
5 结束语
动物运动力学数据采集系统可以实现多通道、高采样率和同步数据实时记录等功能,能够精确获得动物在不同倾斜表面不同粗糙度表面运动过程中的接触反力变化过程,以及身体运动行为的调整过程,为探索和发现动物运动力学规律提供了重要方法,也为仿生机器人的研究提供了理论基础。
[1]Autumn K,Liang Y A,Hsieh S T,et al.Adhesive force of a single gecko foot-hair[J].Nature,2000,405:681-685.
[2]Niederegger S,Gorb S.Tarsal movements in flies during leg attachment and detachment on a smooth substrate[J].Journal of Insect Physiology,2003,49(6):611-620.
[3]Hanna G,Barnes W-J P.Adhesion and detachment of the toe pads of tree frogs[J].Journal of Experimental Biology,1991,155:103-125.
[4]Wang Z Y,Wang J T,Ji A H,et al.Locomotion behavior and dynamics of geckos freely moving on the ceiling[J].Chinese Science Bulletin,2010,55(29):3356-3362.
[5]Wang Z Y,Wang J T,Ji A H,Zhang Y Y,et al.Behavior and dynamics of gecko locomotion:the effects of moving directions on vertical surface[J].Chinese Science Bulletin,2011,56(6):573-583.
[6]Dai Z D,Wang Z Y,Ji A H.Dynamics of gecko locomotion:a force-measuring array to measure 3Dreaction forces[J].Journal of Experimental Biology,2011,214(5):701-706.
[7]Chen J J,Peattie A M,Autumn K,et al.Differential leg function in a sprawled-posture quadrupedal trotter[J].Journal of Experimental Biology,2006,209(2):249-259.
[8]Autumn K,Hsieh S T,Dudek D M,et al.Dynamics of geckos running vertically[J].Journal of Experimental Biology,2006,209(2):260-272.
[9]胡晓军,周 林,陈燕东,等.数据采集与分析技术[M].西安:西安电子科技大学出版社,2010.
[10]顾义坤,倪风雷,刘业超.机械臂分布式控制系统同步方法的研究[J].机械与电子,2010,(11):69-72.
[11]吉爱红,张正杰,戴振东.三维小量程力传感器[P].中国专利:200610041133,2007-02-14.
[12]邢 强,戴振东,王周义.壁虎运动反力和行为的动态同步表示方法[J].现代电子技术,2010,(2):147-150.
