支持力反馈的虚拟手术仿真系统
2013-08-26郑津津
郭 琦,郑津津
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
0 引言
虚拟手术是一门综合性学科,利用医学影像的数据和虚拟现实技术,通过计算机和力学反馈设备构建一个虚拟的环境,可以为外科医生提供虚拟的训练、学习环境,还可以应用于手术前的规划和演练,以提高手术的成功率[1]。虚拟手术涉及到医学、计算机图形学和材料科学等领域,需要用到几何建模、物理建模、碰撞检测、变形计算和触觉反馈等技术[2]。目前,国外的许多大学、研究机构和商业公司都对医学的虚拟手术进行了研究和实践,尤其是在手术的仿真训练领域[3]。在国内也有很多机构进行相关研究工作,主要研究方向集中在医学影像的三维重建、手术过程中的碰撞检测和模拟软组织的变形计算等方面[4-5]。为此,设计并实现了一种支持触觉反馈的虚拟手术系统,可以实时观察虚拟手术的过程,并感受到手术过程中的触觉。
1 仿真系统
1.1 仿真系统结构
虚拟手术仿真系统结构如图1所示,其中力学反馈设备是整个系统中价格最昂贵,也是最重要的组成部分。操作者可以通过控制力学反馈设备的手柄,由力学反馈设备中的传感器跟踪手柄的位置、运动和转动,从而控制虚拟手术中的刀具;同时力学反馈设备还能将虚拟手术中生成的触觉信息通过手柄反馈给操作者;这样,操作者就可以实时感受手术过程中的触觉反馈。显示设备可以将整个手术过程中的虚拟场景实时地显示在操作者的面前,这样,就能产生相对逼真的虚拟手术环境。
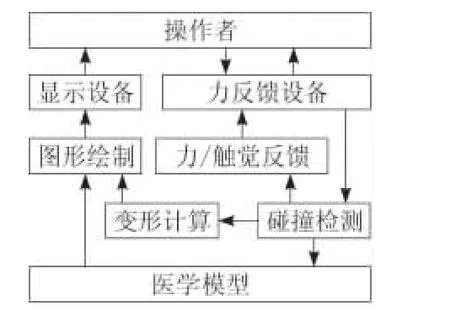
图1 仿真系统结构
1.2 硬件组成
系统使用的硬件是PHANTOM Premium 1.5/6DOF力反馈器,仿真系统所用的计算机配置为Intel(R)Pentium(R)43.00GHz处理器、512MB内存和NVIDIA GeForce 7600GS图形显卡等。
系统所用到的力学反馈设备如图2所示。操作者通过力反馈器的手柄控制虚拟刀具与虚拟肝脏的交互作用。力学反馈器的手柄有6个自由度,包括沿X,Y,Z方向的移动自由度和3个转动自由度;因此可以模拟出刀具任意的空间运动姿态。它的平移分辨率是0.03mm,旋转、摇摆分辨率是0.0023°。同时,它可以产生多种反馈力效果,比如直接作用力、脉冲和颤动等,可以使操作者实时地感受到虚拟手术过程中的作用力。

图2 力学反馈设备
1.3 软件组成
虚拟手术系统软件以MFC类库、OpenGL图形库、力学反馈设备的驱动程序以及力学反馈设备所提供的应用程序编程接口,包括Haptic Device API(HDAPI)和 Haptic Library API(HLAPI)为基础,开发环境是Visual Studio,软件运行的平台是Windows XP。虚拟手术软件的体系结构如图3所示。

图3 软件体系
力学反馈设备提供的API可以提供低层的接口函数,这样,编写程序时就可以把主要工作放在触觉场景的产生、控制场景中的力学属性、对场景中模型的控制以及触觉反馈的效果等方面。
2 系统的关键技术
2.1 对象的建模
构建虚拟手术所需的柔性物体模型,需要考虑几何建模和物理建模。力变形模型建模的基本思路是通过几何插值法,改变模型表面点的位置坐标从而改变物体的形状;并通过前后坐标之间的差值,即变形量来计算接触力[6]。
2.2 有限元模型
有限元模型以连续介质力学和弹性力学为基础,将模型连续地离散为若干个单元,单元之间通过边界上的节点相互联结。用每个单元的近似函数分片地表示未知变量场,再通过变分原理或加权余量法,建立代数方程组或常微分方程组,以求解基本未知量。计算位移变量时,有限元每个单元的任意一处位移都可以通过位移函数,也就是该单元节点位移值来确定[7]。由于单元节点和单元边界的共用性,位移在各单元之间是连续的。这样,就能得到系统动力学平衡方程:

M,D和K分别为模型的质量、阻尼和刚度,F为外力的合成向量,X为节点位移。由边界条件可以求出各个单元节点的位移,再通过位移函数就能得到任意点的位移量。
有限元模型仿真精度较高,但计算量也比较大,也就耗时较长,因此在实际应用时需要简化。为此,Seiferta提出了快速有限元算法[8],Bro-Nielsen提出了浓缩技术的思想。浓缩技术也是基于线性假设,希望能快速求解有限元方程。由于在虚拟现实技术中,人们更关心表面的形变而不是内部的形变,所以就把方程系数矩阵中的和内部节点形变相关的系数去除掉,从而降低了计算量[9]。Berkley借鉴了浓缩法的思想,加上一定的约束边界条件,开发了一套手部虚拟缝合手术仿真系统[10]。
2.3 基于三角形面片的建模
应用最普遍的几何建模方法是使用三角形面片构造三维模型,优点是在模型发生变形时,任意三点能确定一个平面,而不需要考虑模型如何变形,这是其他多边形面片无法做到的[11]。
3 仿真系统
3.1 程序流程
虚拟手术仿真系统在初始化中,除了要构建MFC的程序框架之后,还要与力反馈设备建立通信连接并渲染出OpenGL视口。在此之后,操作者才能顺利加载模型文件,包括虚拟手术所需的医学模型和工具模型。程序支持OBJ和3DS模型,所有模型都可以由3DS MAX一类的三维造型软件中导出,这样,操作者就能非常方便地获取和修改模型。程序流程如图4所示。

图4 系统流程
3.2 界面
虚拟手术仿真系统中,单击“加载模型”按钮,从弹出的选择文件对话框中选择要加载的医用模型文件。模型显示在窗口界面后,操作者按住鼠标左键实现模型的旋转,按住鼠标的右键实现模型的平移拖动,用鼠标中间滚轮实现模型的缩放,这样就能选择实验所需合适的视角。同时,系统还提供了多种模型的显示方式,可以显示点、线、面和线面,方便操作者观察模型。单击“模型属性”按钮,在弹出的模型属性对话框中设置模型的物理属性,如刚度系数、阻尼系数等。单击“加载工具”按钮,从弹出的加载工具对话框中,选择所需的工具。这样,就完成了所有的准备工作。
4 结束语
分析了一个基于VC++,OpenGL,HDAPI和HLAPI构建的虚拟手术仿真系统,通过PHANTOM Premium力反馈设备,能够较好地模拟医学手术的过程。在交互过程中,操作者能够通过力反馈设备的手柄,实时地感受到手术中的触觉。
系统还有局限性,今后要进一步完善的工作包括:优化程序的算法,以提高计算速度;进一步研究人体软组织的变形机理,考虑到软组织的不均匀性、非线性和粘弹性等材料性质,以实现更加逼真的仿真效果。
[1]程立英.虚拟手术若干关键技术研究[D].沈阳:东北大学,2006.
[2]薛 清.虚拟手术中的软组织建模与应用[D].上海:上海交通大学,2006.
[3]王艳飞.虚拟手术系统的研究及其仿真平台开发[D].沈阳:东北大学,2006.
[4]张小瑞,宋爱国,孙 伟,等.支持力/触觉反馈的虚拟肝脏手术仿真系统[J].东南大学学报(自然科学版),2009,39(3):490-494.
[5]张小瑞,孙 伟,宋爱国,等.用于实时人机交互的增强力触觉模型[J].高技术通讯,2012,22(3):299-304.
[6]Salisbury,K,Barbagli F,Conti F.Haptic rendering:introductory concepts[J].IEEE Computer Graphics and Applications,2004,24(2):24-32.
[7]黄绍辉,王博亮.使用有限元模型仿真可变形物体的研究进展[J].系统仿真学报,2007,19(22):5315-5324.
[8]Seiferta S,Burgerta O,Wachter I,et al.Deformable modelling of the cervical spine for neurosurgical navigation[J].International Congress Series,2004,1268:455-460.
[9]Bro-Nielsen M.Finite element modeling in surgical simulation[J].Proceedings of the IEEE,1998,86(3):490-503.
[10]Berkley J,Turkiyyah G,Berg D,et al.Real-time finite element modeling for surgery simulation:an application to virtual suturing[J].IEEE Transactions on Visualization and Computer Graphics,2004,10(3):314-325.
[11]蔡 伟,况迎辉.触觉可视化技术中柔性物体变形模型研究[J].计算机技术与发展,2010,20(3):20-23.
