七自由度空间机械臂运动仿真技术研究
2013-08-26刘世平李世其朱文革
罗 敏,刘世平,李世其,朱文革
(华中科技大学机械科学与工程学院,湖北 武汉 430074)
0 引言
虽然机器人技术进展已经很成熟,但因为机器人多连杆的结构、多自由度的工作空间、恶劣的作业环境、复杂的操作任务,使得机器人的结构设计、机器人与周边设备之间以及机器人各连杆之间的碰撞检测、机器人运动路径规划及远程控制变得相对复杂[1]。将机器人技术及图形仿真技术结合起来开发机器人运动学仿真平台,将会简化机器人设计和控制工作,提高机器人的工作效率,扩展机器人的工作范围,所以运用计算机图形学最新研究成果,开发一套机器人运动学仿真平台具有现实意义。
基于Open Inventor虚拟场景技术、数据库信息管理技术及机器人运动学规划技术,利用Visual C++6.0编程软件,建立空间机械臂运动仿真平台,讨论它的基本原理,分析它的运作过程,并进行实验验证。
1 仿真方案分析
1.1 运动仿真流程
根据数据库中模型运动规划数据表中动素指令的执行序列,依次读取动素指令,解析动素指令,执行动素指令,循环遍历数据库中的模型运动规划数据表、模型运动参数数据表、模型运动关系数据表和模型运动位姿数据表,实时计算模型运动变换矩阵,修改模型局部坐标系相对全局坐标系中的绝对位姿,从而完成整个任务过程的仿真[2]。运动仿真流程如图1所示。
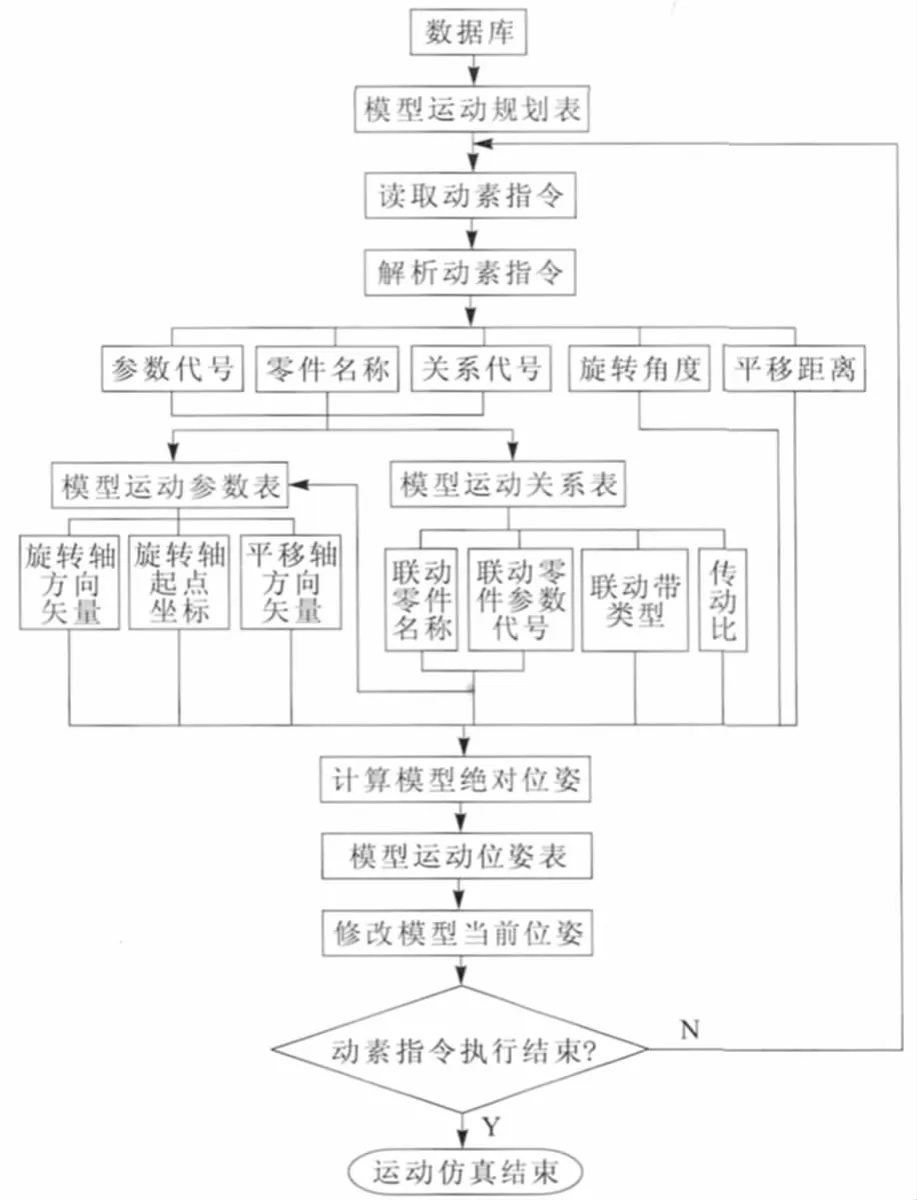
图1 运动仿真流程
1.2 运动位姿计算
运动仿真模块的核心是对模型绝对位姿的计算,而针对不同的联动带类型,主动模型与随动模型绝对位姿的计算方法是不一样的,下面以常见的回转联动带为例讲述模型位姿的计算方法。
设动素指令解析出来的主动模型节点为A,假设旋转角度为Q。根据模型名称和参数代号查询模型运动参数表得到A的相关信息:
根据已知的旋转轴信息和旋转角度,由计算机图形学中绕任意轴旋转变换通式,得到A模型的旋转变换矩阵RA。则

回转联动带分为同轴回转联动带和异轴回转联动带,下面分别计算其随动模型的绝对位姿。
a.设模型运动关系表中与主动模型节点A存在同轴回转联动带关系的随动模型节点为B,模型节点B的旋转角度为Q,查询模型运动位姿表得到模型节点B的绝对位姿矩阵为T。设A旋转轴的方向矢量在B 坐标系下为(k′1,k′2,k′3),起点坐标为(d′1,d′2,d′3)。则

根据计算出的旋转轴信息和已知的旋转角度,由计算机图形学中绕任意轴旋转变换通式,得到B模型的旋转变换矩阵RB。则

b.设模型运动关系表中与主动模型节点A存在异轴回转联动带关系的随动模型节点为B,传动比为S、则模型节点B的旋转角度为θB=Q/S,查询模型运动位姿表得到模型节点B的相关信息如下:
根据已知的旋转轴信息和旋转角度,由计算机图形学中绕任意轴旋转变换通式,得到B模型的旋转变换矩阵为RB。则

2 仿真平台搭建
2.1 运动几何建模
在Pro/E、SolidWorks等三维建模软件中,对运动模型进行几何建模,将其转化为*.iv格式的文件,以便将其导入到虚拟仿真环境中。
2.2 运动参数建模
确定模型局部坐标系相对全局坐标系的位姿变换矩阵,构建模型运动位姿数据表,模型运动位姿数据表主要用来储存模型名称、初始位姿和当前位姿。
确定模型旋转轴参数和平移轴参数,构建模型运动参数数据表,模型运动参数数据表主要用来存储模型名称、参数代号、旋转轴方向矢量、旋转轴起点坐标和平移方向矢量。
2.3 运动关系建模
实体模型之间因为存在真实的运动副而能够自然实现运动的传递,而仿真环境中,虚拟模型之间并不存在真实的运动副,要实现运动的传递,改变模型的绝对位姿,达到仿真的效果,就必须对虚拟模型进行运动关系建模。本研究引入联动带描述虚拟模型之间的运动连带关系,联动带是指主动模型与随动模型之间的运动连带关系。根据主动模型与随动模型之间的运动连带类型,可以将联动带分为回转联动带、转移联动带和平移联动带,如表1所示。
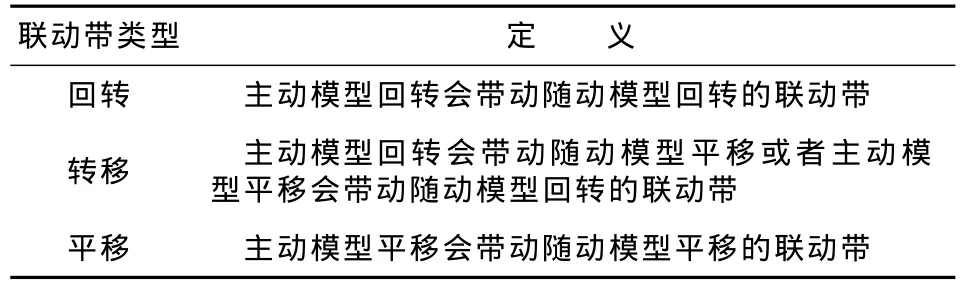
表1 联动带分类
通过对虚拟模型之间联动带的分析,建立模型运动关系数据表。模型运动关系数据表主要用来存储模型名称、关系代号、联动带类型、关联零件、关联零件参数代号和传动比。
2.4 运动场景建模
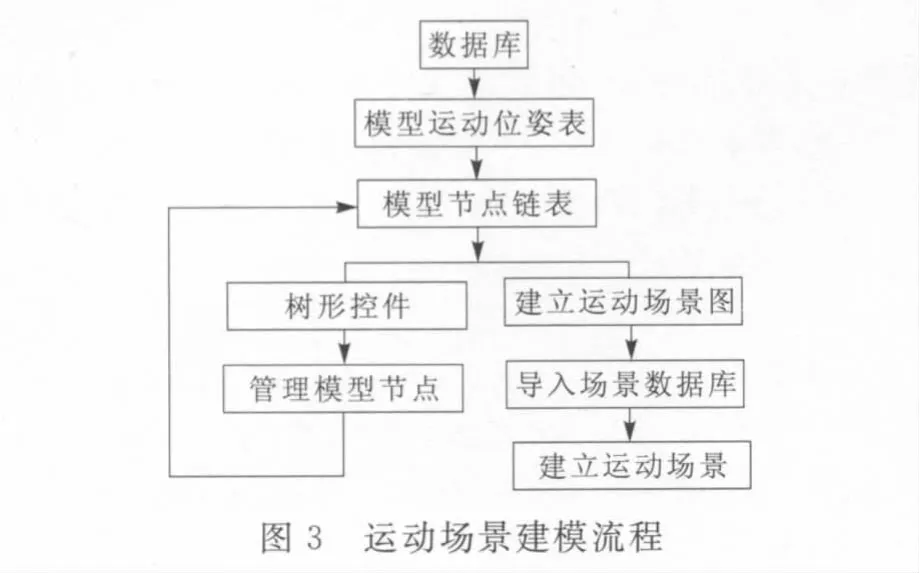
根据数据库中模型运动位姿表提供的模型名称和初始位姿读入到模型节点链表,依次遍历链表中的节点信息,利用树形控件对模型进行可视化、交互式的管理,实现模型节点的添加、修改和删除,按场景组织原则建立运动场景,如图2所示,整个运动场景建模流程如图3所示。场景图中的分隔符节点保证模型运动的相对独立性,修改模型节点相应的变换节点的矩阵域值,就能实现模型节点在运动场景中的重新定位,将场景图导入Open Inventor的场景数据库中[3-5],从而创建运动场景。

3 仿真任务规划
采用合理的任务划分方法,可以提高执行效率和运动精度,仿真任务根据粒度的不同,上层任务由粗粒度划分组成,随着任务层次的降低,逐渐细化为细的粒度。仿真任务按照由粗到细的粒度原则,将仿真任务划分为4个层次,第1层为任务层,第2层为操作层,第3层为动作层,第4层为动素层[6]。
任务划分过程:第1阶段将任务单元划分为操作单元;第2阶段将操作单元划分为动作单元;第3阶段将动作单元划分为动素单元;第4阶段将动素单元转化为动素指令。
仿真任务规划的核心是确定动素指令,首先是对机械臂进行运动路径规划,确定路径关键点;然后是建立机械臂运动学模型,完成机械臂运动学的正解与反解[7-8];接着在三维软件Pro/E中对机械臂进行位姿定位,依次测量运动实体之间的相对变换矩阵,由机械臂运动学反解得出相应旋转角度,最后对机械臂进行运动轨迹规划,确定动素指令。
根据任务划分的结果,建立模型运动规划数据表。模型运动规划数据表用来存储执行序列、任务名称、操作名称、动作名称、动素名称和指令编码。
4 仿真实验验证
利用Visual C++6.0编程软件建立了空间机械臂运动仿真平台,运动仿真交互操作界面如图4所示。下面以七自由度步行机器人搬运桁架任务为实例进行实验验证。

图4 运动仿真交互操作界面
通过运动几何建模、运动场景建模,完成如图5所示空间机械臂仿真环境的构建。分析空间机械臂各连杆之间的运动连带关系,前置连杆与后置连杆联动带类型为同轴联动,完成模型运动关系的建模。分析空间机械臂搬运桁架任务过程,任务在操作层次上分为进入作业空间、执行作业任务和离开作业空间,任务在动作层面上分为机械臂展开、机械臂接近桁架和机械臂捕获桁架,机械臂搬移桁架,任务在动素层面上分为调整、定位、对接和移位,通过空间机械臂运动路径规划,完成动素指令的确立,从而完成仿真任务的建模。
图5 仿真环境
开启运动仿真过程,循环遍历数据库中的4张数据表信息,实时计算机器人各连杆及桁架模型的绝对位姿,实现七自由度步行机器人搬运桁架任务的仿真,运动仿真过程如图6所示。

图6 七自由度步行机器人搬运桁架任务仿真过程
5 结束语
基于Pro/E几何建模技术、Open Inventor虚拟场景技术、数据库信息管理技术及机器人运动学规划技术,利用Visual C++6.0编程软件完成了空间机械臂运动仿真平台的设计,实现了空间机械臂搬运桁架任务的仿真。实验结果表明,所提出的运动仿真方法是有效的、便捷的,它使得操作者可以动态修改数据库中的数据表信息来适应变化的场景和任务,因而具有良好的实用性,较强的通用性,充分利用了计算机图形学最新的研究成果,减少图形设计开发的工作量,可把精力更多用于机器人结构设计、机器人控制算法、避障算法及路径规划算法的研究。
[1]熊有伦,丁 汉,刘 恩.机器人学[M].北京:机械工业出版社,1983.
[2]Jindong Tan,Ning Xi.Hybrid system design for singularityless task level robot controllers[C].Proceedings of the 2000IEEE International Conference on Robotics and Automation,2000.3007-3012
[3]侯国柱,汤学华.基于Open Inventor的机器人运动仿真技术研究[J].机械设计与制造,2010,(6):161-162.
[4]阎锋欣,侯增选,等.Open Inventor程序设计从入门到精通[M].北京:清华大学出版社,2007.
[5]Huang Haiming,Liu Baowei,Liu Jingang.Building of virtual reality scene based on real scenery[J].Computer Engineering,2005,31(4):183-186.
[6]赵 迪,李世其,朱文革,等.基于任务级的空间遥操作研究[J].载人航天,2012,18(5):82-87.
[7]Manocha D,Canny J F.Efficient inverse kinematics for general 6Rmanipulators[J].IEEE Transactions on Robotics and Automation,1994,10(5):648-657.
[8]王雪松,许世范,郝继飞.MOTOMAN机械手逆运动方程新的推导方法及求解[J].中国矿业大学学报,2001,30(1):73-76.