激光枪自动射击装置设计与实现*
2013-08-21邓彬伟温沐阳王传呈
谭 洪,邓彬伟,温沐阳,王传呈
(湖北理工学院电气与电子信息工程学院,湖北 黄石 435003)
1 引言
研制激光打靶射击训练器并装备到连队,对于减少国防开支,提高军事训练水平,实现国防现代化,军事训练智能化等均具有重要的现实意义。目前,新兵射击训练主要分为瞄准和实弹射击两个部分,瞄准训练的周期较长,实弹射击由于受到场地和条件的限制,训练组织工作量大,牵扯到场地、警戒、安全等诸多环节[1]。传统模拟打靶射击系统复杂度高且不便携,故该系统采用了无线传输的方式,可以满足各种训练场地的需求,使得系统更加灵活、便携[2-3]。然而,传统无线激光打靶系统一般采用光电探测器来接收激光枪发出的模拟子弹,系统复杂且精度不高,而本系统由CMOS图像传感器来代替光电探测器,能够有效的减小系统的复杂性,增加测量精度[4]。为此设计了一种激光枪自动射击装置,为成功解决上述问题提供了新的思路和方案,它具有安全、简便、射击精度高、弹着点实时显示等功能。
笔者介绍了一个激光枪自动射击装置,通过控制激光枪打在靶面的目标位置,通过摄像头视频处理技术,将靶面信息采集并处理,由无线发送接收模块发给远处的主机,然后由主机控制语音模块进行语音报靶并通过液晶模拟显示靶面的信息,从而实现激光枪的自动射击和报靶功能。
2 系统方案
2.1 系统总体方案设计
系统由两个MSP430F149控制模块,CC2500无线发射接收模块,电机驱动模块,矩阵按键模块,OV7670带FIFO的模组摄像头的图像信息采集模块,LCD240×128液晶显示模块,以及相应的外围电路组成。系统整体框图如图1所示。

图1 系统整体框图
2.2 设计方案论证
2.2.1 电机方案选择
普通直流电机难以用单片机控制转动到准确的角度,且动力不够强,容易产生噪声而影响寿命,难以满足要求。舵机对控制死区敏感,输入信号和反馈信号的波动,差值超出范围,容易产生抖舵。所以采用步进电机和细分器实现,步进电机步距角为1.8°,经细分器64细分后步距角为0.028°,能实现精确定位,此外细分可以改善电机低速时候的颤动,降低电机的运行噪音且容易通过单片机控制。
2.2.2 图片信息采集方案选择
传统的模拟激光打靶系统一般采用CCD图像采集识别,但其硬件结构复杂,数据量和运算量很大。本系统采用OV7670C高清晰CMOS模组摄像头,OV7670C具有体积小,工作电压低,功耗低,灵敏度高,用户可以完全控制图像质量、数据格式和传输方式,易操作。
2.2.3 无线收发方案选择
采用CC2500无线发射接收模块,CC2500为2.4G无限社评通信模块,具有体积小,灵敏度高,抗干扰性强等优点,且芯片内自带频率合成器,不需要外部滤波器或RF转换,能有效的减少外部元器件。
2.2.4 液晶显示模块
采用LCD240×128液晶显示。LCD240×128和LCD12864相似,也具有8位并行和串行数据传输,控制简单,操作方便且具有240×128的分辨率。
2.2.5 语音模块
采用 ISD4004语音模块,ISD4004芯片采用CMOS技术,内含振荡器、防混淆滤波器、平滑滤波器、音频放大器、自动静噪及高密度多电平闪烁存贮陈列。芯片采用多电平直接模拟量存储技术,每个采样值直接存贮在片内闪烁存贮器中,因此能够非常真实、自然地再现语音、音乐、音调和效果声,避免了一般固体录音电路因量化和压缩造成的量化噪声和“金属声”。
3 理论分析与计算
3.1 靶场搭建尺寸设计
靶场设计如图2所示。靶场采用长方体结构,结构稳定,便于摄像头的固定。
3.2 激光枪自动控制原理
激光枪由单片机通过三极管控制其开关,由两个42步进电机组成的二维转动平台来控制激光枪所打的位置。步进电机是由THB6128步进电机细分器驱动的,42步进电机步距角为1.8°,经细分器64细分后步距角为0.028°,可实现激光枪精确打靶。

图2 靶场设计尺寸图
3.3 弹着点检测原理与计算
激光的亮度在数据采集中的是最高的,其像素值在0XE0以上,所以采集到这个数据可以认为是激光的数据,将所有激光点的(X,Y)数据分别相加再除以捕获到的总激光点个数,得到激光的精确的定位绝对坐标,利用了求平均值法。
如图3所示。以固定在胸环靶四周的四个黑点来定位,这4个黑点的灰度值为0×30以下的数据,分别采集这4个点的坐标,根据靶子的偏移量算出实际靶子和这4个点的相对位置得到修正后的靶子的精确绝对坐标,靶子上下左右断点的(X,Y)坐标。相对坐标为主机屏幕使用的坐标,它的长宽分别为120×120,采集到的绝对坐标系为240×240,然后在绝对坐标中采集到的靶子的上下左右端点的坐标。以绝对X坐标转换为相对X坐标为例,利用比例法改变:X=((X-靶子左端点X坐标)×120)/(靶子右端点X坐标-靶子左端点X坐标)。

图3 胸环靶与液晶显示比例运算模型
4 电路与程序设计
4.1 总体电路设计
总体电路设计如图4、5所示。它包括电源模块、OV7670图像采集模块、CC2500无线模块、控制与显示模块、矩阵键盘模块、电机细分驱动模块和键盘输入模块。
4.2 软件设计流程
系统软件由一个菜单模块构架,使用大屏幕和矩阵键盘作为人机交互界面。在不同的菜单下可运行相互独立的多种功能,使得软件结构分明。摄像头探测靶环部分主要由按键控制电机转动,使激光点打在靶环上某处(或脱靶),再使用采样按键,便会将采样模块传来的信息进行处理,并更新屏幕上的信息,同时语音模块报出靶环及相对位置。激光点打靶部分,可使用按键选择目标环数与区域,再通过按键开启打靶,电机将受到摄像头采样的反馈,进行比例运算,多次转动固定步数,投射到相应区域。程序流程图见图6。

图4 主机控制电路
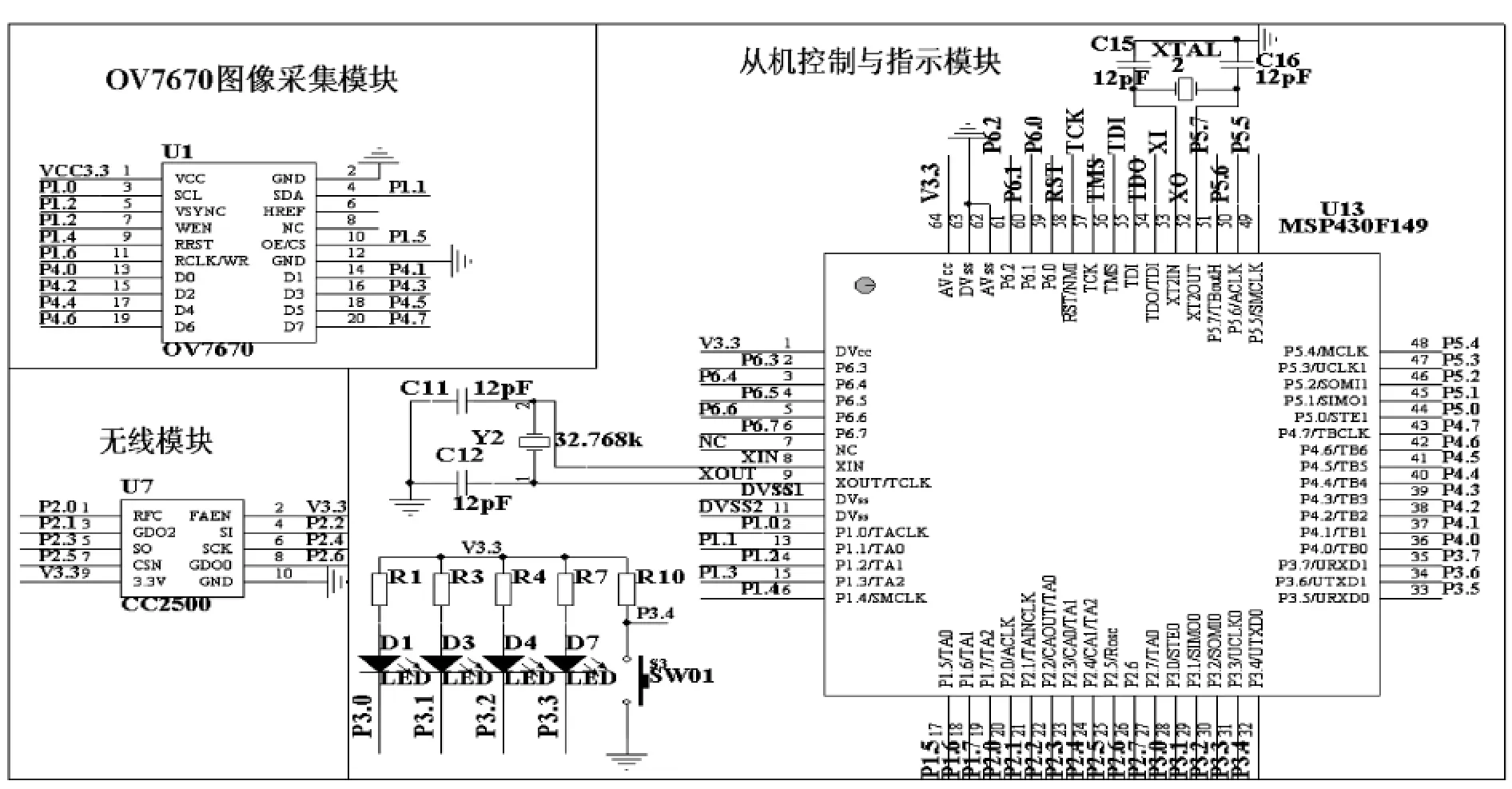
图5 从机控制电路
5 测试方案与测试结果
在激光枪与胸环靶间距离为10m的地点用受电路控制的激光枪发射直径小于5mm的激光束,激光束照射于胸环靶上弹着点位置可通过矩阵按键任意移动改变,弹着点所在的环数、方位可通过LCD液晶显示并用语音播报。手动调节弹着点到任意位置,可迅速瞄准靶心。弹着点在任意初始位置,通过矩阵按键设置任意指定的环数和方位,也可迅速到达指定位置。
5.1 测试结果及分析
测量结果表明能手动任意改变弹着点的位置,并在LCD240×128液晶上准确显示胸环靶的图形以及弹着点所在环数和方位,并通过语音播报;自动控制激光枪,在5s内将激光束光斑从胸环靶上的指定位置迅速瞄准击中靶心,可根据任意设定的环数和方位,控制激光枪瞄准击中胸环靶上相应位置,并且可以设定任意坐标位置,控制激光枪快速定位到指定坐标处。

图6 程序流程图
6 总结
本系统采用摄像头与胸环靶间距可调可固定,增加系统的灵活性,可靠性;并采用步进电机细分电机驱动模块,精度高,电机抖动小,系统稳定性大大增强,并提供人性化的人机交互节目,采用自动语音播报,使测试变得更加方便易行。
[1]李 广.模拟实弹激光打靶训练器的设计[D].重庆:重庆大学:2005.
[2]赵 苗.激光模拟打靶训练系统的研究[D].南昌:南昌大学,2007.
[3]闫瑞杰,何小刚,柴婷婷.新型无线激光打靶系统的设计[J].太原理工大学学报,2006(1):104-107.
[4]余 剑.基于CMOS图像传感器的激光射击模拟训练系统的研究[D].南京:南京理工大学,2005.
