基于CTD的浮力补偿系统研究
2013-08-18卢海洋
卢海洋,查 智
(中国船舶重工第七一〇研究所,湖北 宜昌 443003)
0 引言
21世纪是海洋的世纪,在广阔无垠的海洋空间,蕴藏着丰富的海洋生物资源、海洋矿物资源,是人类社会可持续发展的重要财富。水下机器人在海洋资源勘探和开发中的应用越来越广泛,也发挥着重要的作用,具有广泛的应用前景。对于大型或重型UUV运载平台,其在无人干预远程自主航行过程中,由于所处外部环境海水温度、盐度、深度的变化会引起海水密度的变化,导致UUV的浮力发生变化,对UUV的航行控制产生不利的影响,需要进行浮力补偿。如果不对这种浮力变化作出补偿则会使UUV可能沉入海底或浮于水面,影响作业任务的完成[1]。
1 水下航行器浮力补偿发展现状
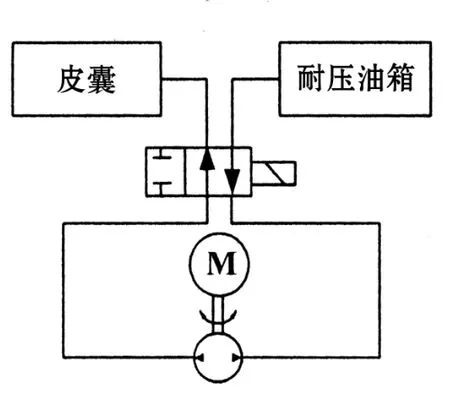
图1 油介质型原理图
通常,物体在水中实现沉浮动作通常有三种途径:1)改变物体的体积而不改变质量;2)改变物体的质量而不改变体积;3)增加或减少所施加的外力,第一种和第二种方案的典型工作原理分别如图1、图2所示。第一种方案主要通过向皮囊中注/排油的方式来改变其体积大小,从而实现浮力调节;第二种方案是通过向水舱中注/排水的方式来改变航行体质量来实现浮力调节;第三种方案是通过航行体自身的动力装置来施加一个外力,从而实现浮力平衡作用[2-3]。
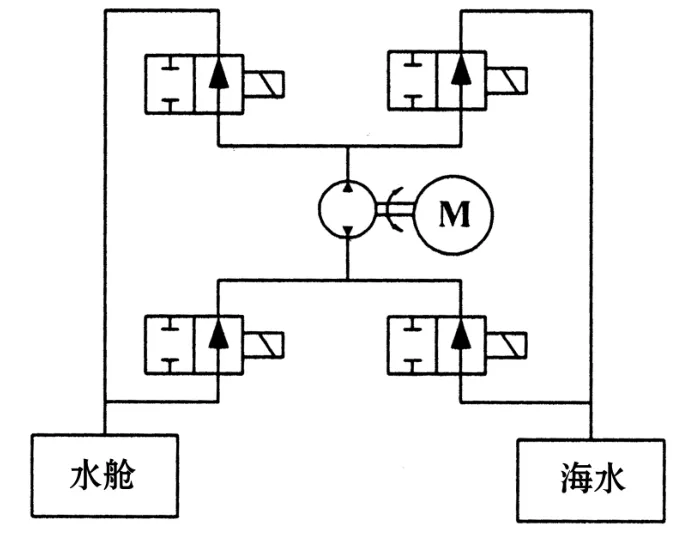
图2 水介质型原理图
综上所述,第一种方案,需要在UUV内部存贮相当数量的液压油,由于UUV内部空间有限,采用此种方法将占用大量的空间,不利于UUV的整体设计。第三种方案,需要UUV自身携带的动力装置来实现浮力的平衡,将消耗过多的能量,而UUV在水下航行时,所携带的能量是有限的。根据本文的研究背景,故采用第二种方案实现UUV的浮力调节功能[4-5]。
2 浮力补偿系统在UUV中的应用
2.1 系统的研究意义
随着水下机器人技术不断发展和成熟,其在民用领域和军用领域都将有越来越多的应用。近年来,以UUV为代表的各种无人作战平台在现代战争中扮演着重要的角色,成为兵力的倍增器,这一趋势大大促进了人们对UUV技术的研究和应用。根据美国海军发布的无人潜航器(UUV)总体规划,待发展的UUV根据尺寸和重量分为便携式航行器、轻型航行器、重型航行器、大型航行器四类,本文研究的浮力补偿系统,主要针对重型或大型航行器,解决其在远程航行过程中的浮力补偿问题[6]。
下面以中国南海11月份海水密度分布图为例,分析UUV航行过程中浮力变化情况[7]。
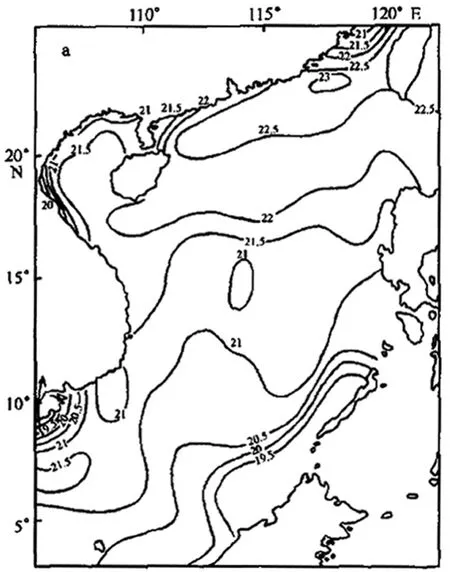
图3 11月份南海表层密度分布图(多年平均)
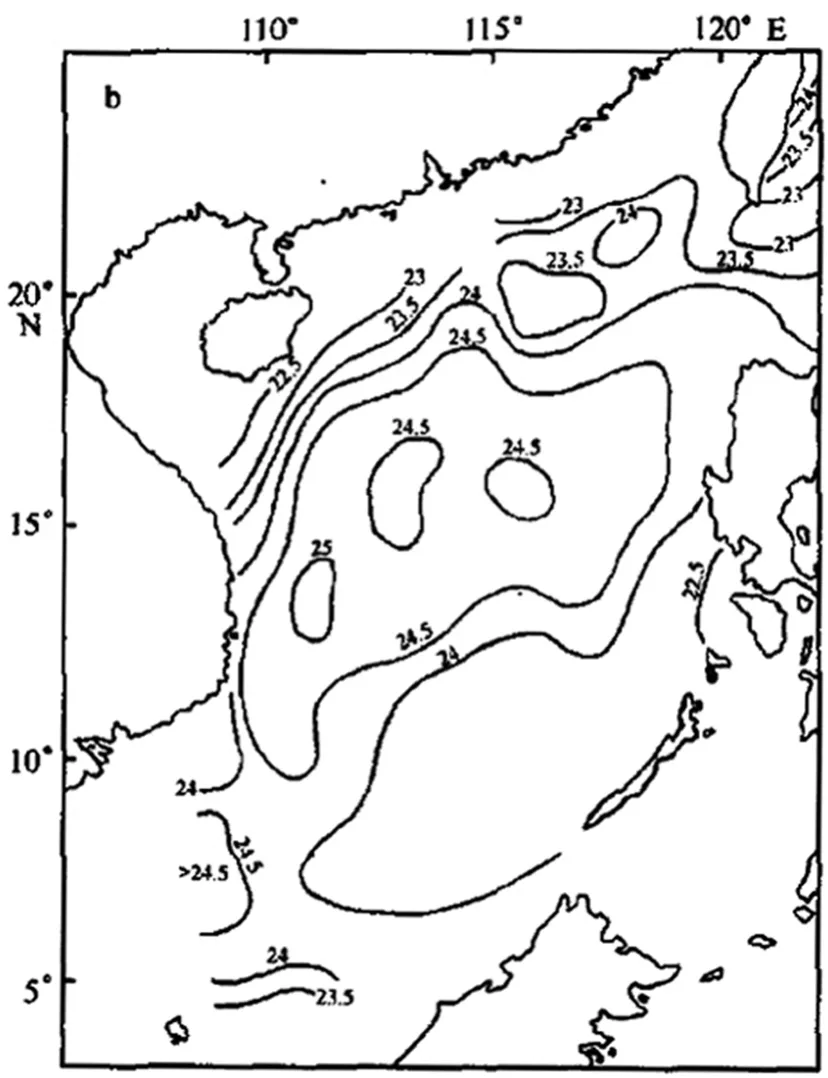
图4 11月份南海100 m层密度分布图(多年平均)
11月份南海表层海水密度变化范围基本在1.020~1.022 g/cm3之间,局部地区大于1.022 g/cm3但是小于1.0225 g/cm3,如图3所示(图中标示的是现场条件密度)。11月份南海100 m层海水密度变化范围基本在1.022~1.024 g/cm3之间,局部地区大于1.024 g/cm3但是小于1.0245 g/cm3,如图4所示(图4中标示的是现场条件密度)。则在此海域内,0~100 m深度范围内,海水密度最大变化量约为0.0045 g/cm3。
如果不考虑码头附近由于淡水的注入密度远远小于外海,按UUV排水量从小到大,依次计算其浮力变化值如表1所示。
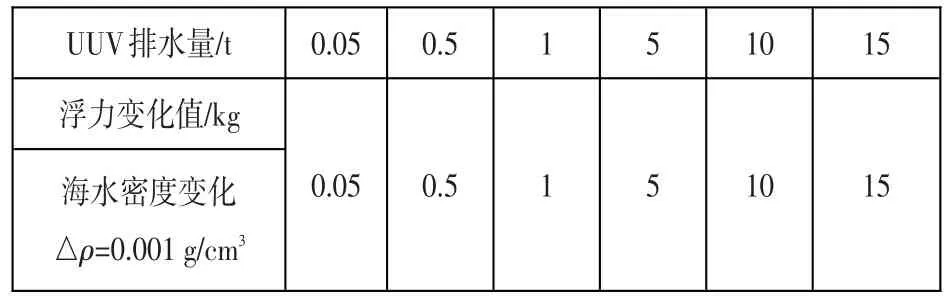
表1 浮力变化值
由表1可知,若UUV排水量为10 t,海水密度变化为0.002 g/cm3时,UUV需要调节的浮力值为196 N。在南海航行时,UUV需要调节的浮力值为441 N,不管其为正浮力或负浮力,都将给UUV航行和安全带来灾难性的影响,所以必须对UUV的浮力变化采取相应的补偿措施。
2.2 系统组成
浮力补偿水舱、调节装置和控制器在UUV中的位置如图5所示,在UUV的艏、艉段分别布置一个水舱,保证进行浮力补偿时力矩平衡的作用。调节装置和控制器布置在水舱旁的空舱内,浮力补偿控制器采用主从方式,主控制器从UUV中央控制器接收指令,然后再分别向两个从控制器发送控制指令,从而实现UUV的浮力补偿[8]。
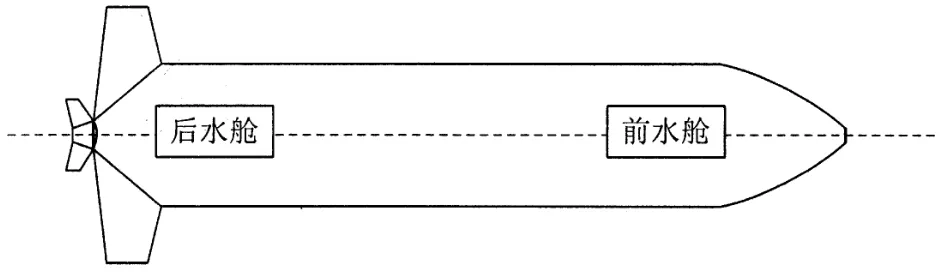
图5 水舱位置图
UUV浮力补偿原理框图如图6所示,UUV在航行过程中,需要进行浮力补偿时,浮力补偿控制器根据当前海水密度和初始海水密度进行比较,计算其浮力变化值,然后对AUV前后水舱进行浮力分配,通过浮力调节装置注/排水的方式实现UUV的浮力补偿。
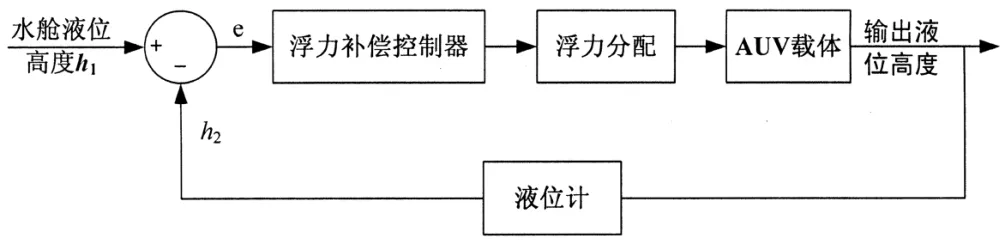
图6 浮力补偿原理框图
浮力补偿系统主要由浮力补偿控制器、液位传感器、浮力调节装置和CTD传感器等几部分组成。浮力补偿控制器根据CTD传感器提供的海水温度、盐度、深度信息,通过海水状态方程公式进行计算,得出当前UUV所处环境的海水密度。浮力补偿控制器运用适当的算法,通过浮力调节装置向UUV舱内注/排水的方式来改变UUV自身的质量,从而达到浮力补偿的目的,系统原理框图如图7所示[9]。
3 基于CTD的浮力补偿原理
3.1 浮力补偿原理
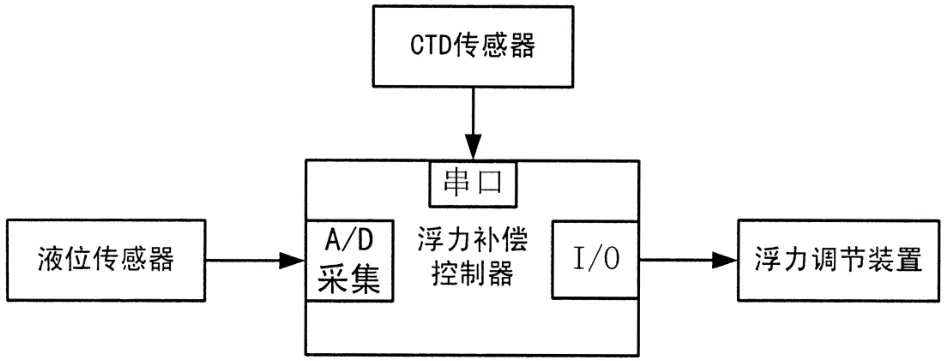
图7 浮力补偿系统原理框图
由阿基米德原理可知,当一个物体全部浸在水中且处于平衡状态时,流体作用在此物体上力的大小等于被此物体排开的水的重力,方向与重力相反,由于本文是研究UUV在水下航行的过程,所以其受到的浮力为[10]:

对于UUV在水下航行过程中,由于UUV所处外部环境海水密度变化所导致的浮力变化计算公式推导如下:

将式(2)与式(3)相除,得:

所以,UUV航行过程中由于海水密度变化导致浮力变化计算公式为:

式(5)中:ΔF表示浮力变化值;
Δρ表示海水密度的变化值;
ρ0表示淡水的密度;
m0表示UUV质量。
3.2 海水密度计算
海水密度是研究海洋学的一个重要参数,海水密度不仅与海水的温度、压力和盐度有关,而且还和纯水的密度有关。本文根据80国际海水状态方程(IESS-80)计算UUV所处环境海水密度,具体流程如图8所示[11]。
浮力补偿算法软件流程图如图9所示。具体执行过程如下:浮力补偿算法根据CTD采集到的数据计算海水密度,并根据当前密度值与初始值之间的变化量Δρ与e1进行比较。当Δρ≥e1时,需要进行浮力调节,并计算需要补偿的浮力值,驱动浮力调节装置工作,以实现浮力自适应之功能,浮力调节完成后将初始密度值置为当前密度值,即 ρ0=ρ1。当Δρ<e1时,不需要进行浮力调节。
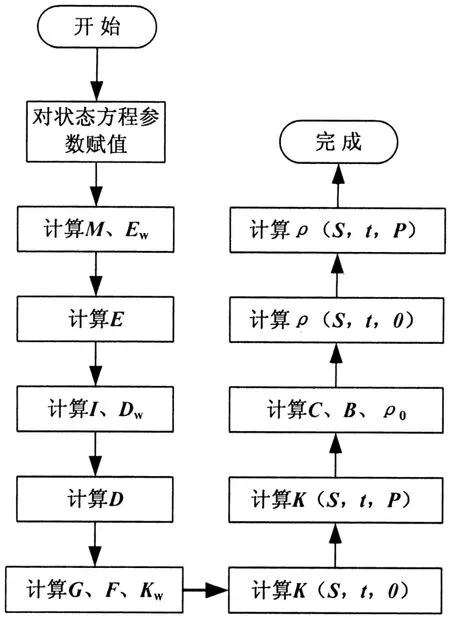
图8 海水密度计算软件流程
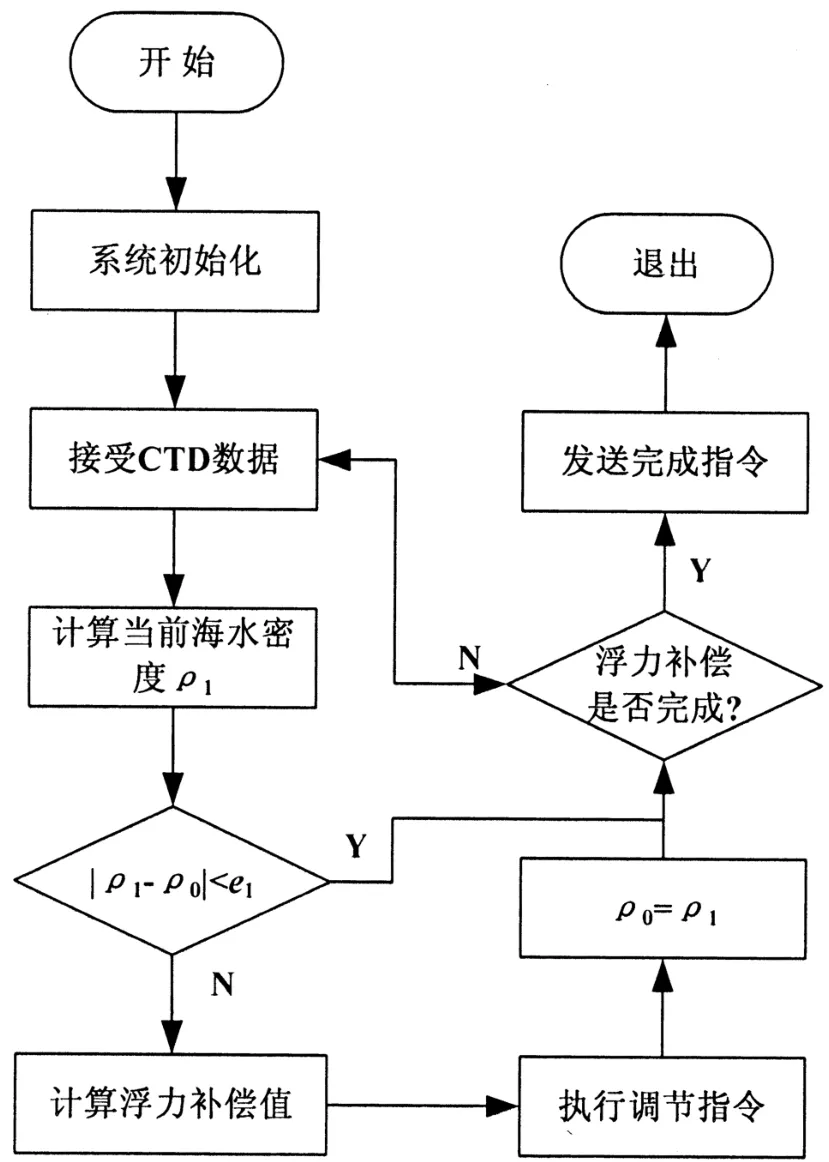
图9 浮力补偿算法软件流程
3.3 仿真结果分析
本文对浮力补偿算法进行半实物仿真分析,CTD采集的海水温度、盐度、深度数据用计算机模拟输入,计算出当前海水密度ρ1,与初始海水密度 ρ0进行比较,当 Δρ=|ρ1-ρ0|≥e1时,进行浮力补偿, Δρ=|ρ1-ρ0|<e1时,不进行浮力补偿。根据实际使用情况,本文取e1=1 kg/m3,UUV排水量V排=15 t,海水泵的流量Q=20 L/min。
根据UUV进行浮力补偿时的实际应用情况,下面分别从Δρ<e1、Δρ≥e1两种情况进行仿真分析。因为在UUV航行过程中,海水盐度、温度变化,对海水密度影响较大,所以在本文仿真试验中主要改变海水盐度和温度。UUV在航行过程中,假设温度、盐度、深度变化情况如表2所示,UUV航行深度用压强表示。

表2 海水密度计算值
从表2可知,当温度变化Δt=4℃或盐度变化ΔS=1时,对应表中序号分别为1和2、1和3,则海水密度变化分别为 Δρ=0.84 kg/m3<e1、Δρ=0.77 kg/m3<e1,水舱中水的体积仿真变化曲线如图10、图11所示。
当温度变化Δt=5℃或盐度变化ΔS=2时,对应表中序号分别为1和4、1和5,则海水密度变化分别为Δρ=1.059 kg/m3>e1、Δρ=1.542 kg/m3>e1。为了便于对比分析,仿真时将海水密度先由 ρ0增大 ρ1,再由 ρ1减小为 ρ0,看注入水量和排出水量是否相同,水舱中水的体积仿真变化曲线如图12、图13所示。
从图10~图13可知,当海水密度变化Δρ<e1=1 kg/m3时,浮力自适应控制系统没有进行浮力补偿工作;当海水密度变化Δρ≥e1=1 kg/m3时,海水密度先由 ρ0增大到 ρ1,再由 ρ1减小为 ρ0,浮力自适应控制系统进行浮力补偿工作,并完成相应注排水工作,注入和排出水量相同,实现浮力补偿功能。
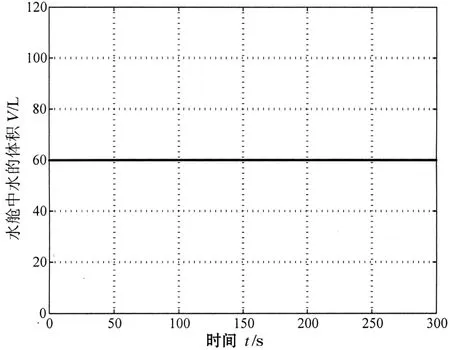
图10 温度变化Δt=4℃
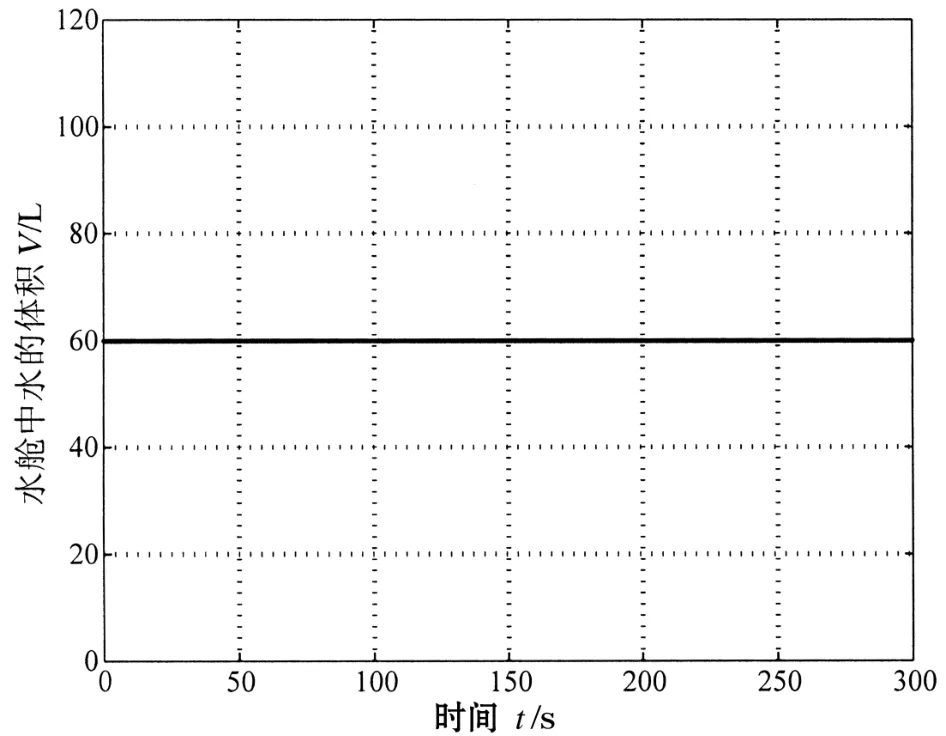
图11 盐度变化ΔS=1
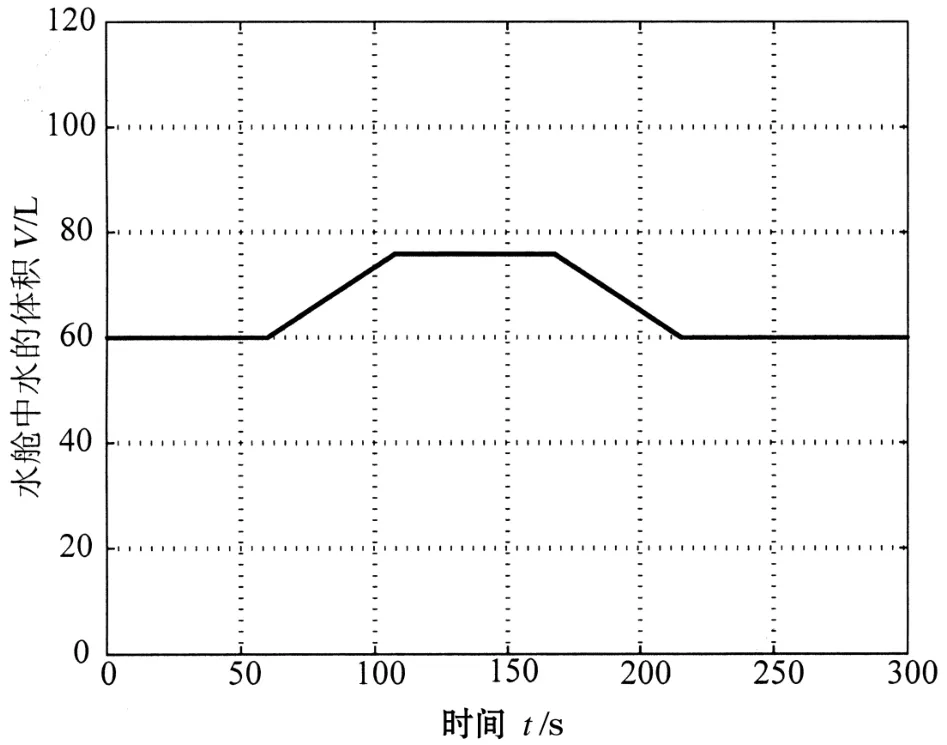
图12 温度变化Δt=5℃

图13 盐度变化ΔS=2
4 结论
本文针对重型、大型UUV在远程航行过程的浮力补偿问题进行研究,设计了一种基于CTD的浮力自动补偿系统,有效地解决了UUV在航行过程中浮力补偿问题,为今后重型、大型UUV运载体的应用奠定了关键的技术基础。
[1]陈强,张林根.美国军用UUV现状及发展趋势分析[J].舰船科学技术,2010,32(7):129-134.
[2]钱东,孟庆国,薛蒙,等.美国海军UUV的任务与能力需求[J].鱼雷技术,2005,13(4):7-13.
[3]苏纪兰,袁业立.中国近海水文[M].北京:海洋出版社,2005.
[4]郑荣,常海龙.浮力调节系统在作业型AUV上的应用研 究 [J].微 计 算 机 信 息 ,2006, 22 (9-2):207-208.
[5]杨钢,郭晨冰,李宝仁.浮力调节装置实验研究[J].机床与液压,2008,36(10):52-53.
[6]严安庆,方学红,杨邦清.浅谈潜水器浮力调节系统的研究现状[J].水雷战与舰船防护,2009,17(2):55-59.
[7]邱中梁,冷建兴,陈建国,等.深海载人潜水器可调压载系统研究[J].液压与气动,2003(11):9-11.
[8]卢海洋,林平.基于模糊PID控制的UUV定深控制系统设计[J].重庆理工大学学报,2011,25(214):58-62.
[9]赵文德,李建朋.基于浮力调节的AUV升沉运动控制技术[J].南京航空航天大学学报,2010,42(4):411-417.
[10]王恩华.阿基米德原理教学案例[J].物理教学讨论,2007,25(295):17-18.
[11]姚勇,卫薇,陈华秋.90国际温标对80国际海水状态方程影响的研究[J].海洋技术,2001,20(3):74-78.