传感器网络时间差双曲线目标定位方法*
2013-08-18程远国杨津骁
程远国 陈 云 杨津骁
(海军工程大学电子工程学院 武汉 430033)
无线传感器网络(wireless sensor networks,WSN)自组织、自适应和高冗余设计等特性使得其特别适用于目标的定位与跟踪[1],而对目标的准确定位是目标跟踪的前提.与传统的传感器(如雷达等)相比,WSN节点的软硬件资源有限,要求运行其上的定位算法计算简单、时间和空间复杂度低.目前目标定位方法主要有基于信号到达不同节点的时间的 TOA(time of arrival)方法[2]、基于信号到达不同节点的角度的DOA(direction of arrival)方法[3]、基于信号到达不同节点的时间差的 TDOA(time difference of arrival)方法[4-5].TOA方法定位精度高,但算法对时间同步要求较高,对节点的硬件和功耗的要求较高.DOA方法易受外界环境影响,且需要额外硬件,在硬件尺寸和功耗上不适用于大规模的WSN应用.TDOA方法具有较高的定位精度,且降低了时间同步的要求,不失为一种可行的WSN目标定位方法.本文采用一种基于声传感器节点的TDOA目标定位方法,目标发出声信号,多个节点接收信号后,估计出信号到达的时间差TDOA,一个TDOA估计值对应的是2个传感器节点为焦点的一对双曲线,多个TDOA估计值对应多条双曲线,这些双曲线的交点即为被测信号源的位置.针对基于TDOA的目标定位问题,文献[6]提出一种利用两点确定声源曲线、利用三点确定声源范围三角,最后采用质心算法确定目标位置的方法.为简化计算,其用于确定声源曲线的两点位于X轴上且对称分布,这在节点随机部署的WSN中不能得到保证.为提高算法的适应性,本文在文献[6]的基础上,建立绝对与相对坐标系,绝对坐标系指的是传感器网络所在区域的地理坐标,依靠节点自定位技术,每个节点能确定自己的位置.相对坐标系指的是在具体定位过程中,数量有限的几个传感器之间建立的局部坐标系.首先选择2点建立相对坐标系X轴,为进一步简化计算,选择位于Y轴上的第三点确定声源范围三角.对目标的定位,是在各传感器节点已经知道自身绝对或相对坐标的基础上开始的.在进行定位时,需要在相对坐标系中计算出目标位置后,再转换到绝对坐标系,最终确定目标的位置.
1 定位方法
1.1 根据2点确定目标曲线
为简化计算,选择2个节点S1,S2建立X轴,见图1.目标T在t时刻发出声信号,在t时刻后,节点S1,S2会相继收到目标传来的信号.
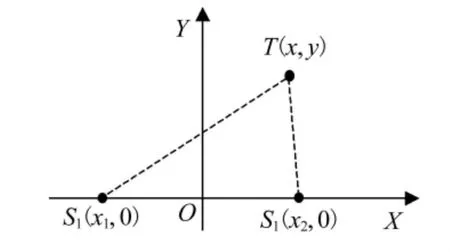
图1 两个传感器确定目标位置曲线
声信号传播速度设为v,信号到达2个传感器网络节点S1,S2的时间差为Δt,则目标T到2个节点的距离之差Δd为

则目标的位置坐标就在这条双曲线上.
1.2 根据3点确定目标坐标
1.1 中,已经用2个已知位置坐标的传感器确定了目标的坐标曲线,如果再建立一个范围,那么这2个范围的交集就是该目标t时刻的位置.如图2所示,增加一个无线传感器网络节点S3(0,y1).
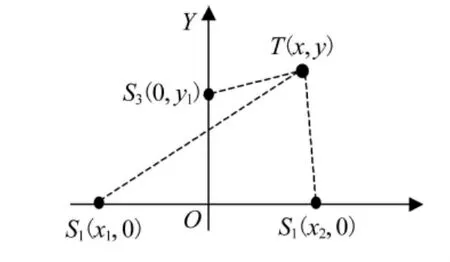
图2 三点确定目标坐标
t时刻目标的信号在之后的不同时刻分别被节点S1,S2,S3收到,在每2个节点之间都产生了距离差值,分别记为ΔdS1S2,ΔdS1S3,ΔdS2S3对应的3条双曲线分别为




在取定坐标和距离差参数时,要满足B2-4AC≥0,才能使得方程有解.所以根据到达时间差的正负,舍去负根之后有
同理,可求得另外2个交点.理想情况下式(4)~(6)会交于一点,该点即为目标位置,但由于存在时间差测量误差等误差,距离差双曲线不会相交于一点,而是两两相交形成三角形.这时可采用质心算法来近似估计目标所在的位置(x,y).
1.3 坐标转换
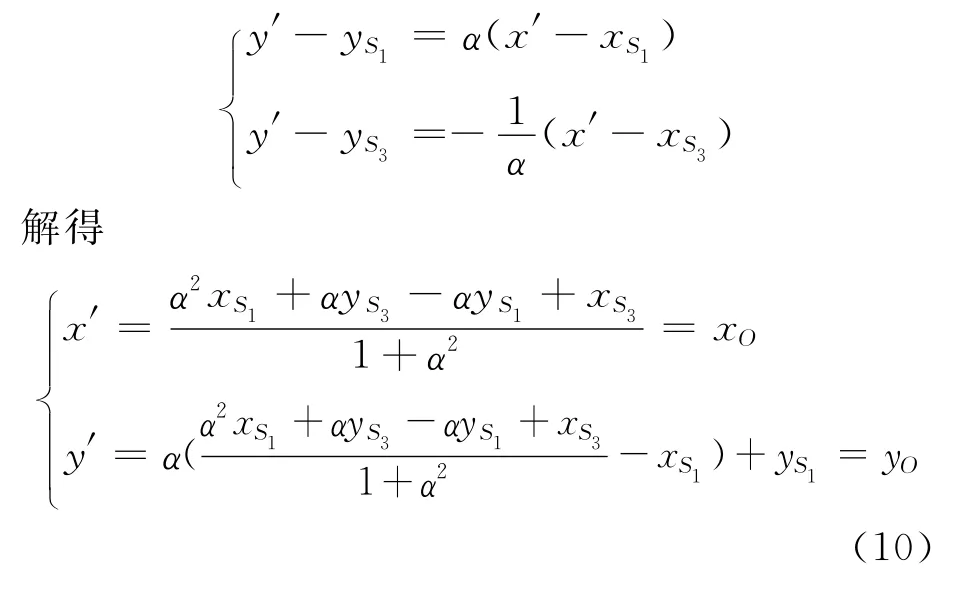
在相对坐标系中解算出的目标位置需要转换到绝对坐标系中,见图3.XOY是由传感器节点S1,S2,S3所确定的相对坐标系,而 X′O′Y′是整个传感器网络所在区域的绝对坐标系.其中,S1,S2,S33点的绝对坐标分别设为(xS1,yS1),(xS2,yS2),(xS3,yS3)相对坐标系原点O 的绝对坐标为(xO,yO),α是相对坐标与绝对坐标X 轴之间的夹角.

图3 绝对与相对坐标转换
坐标转换可分为旋转和平移两个步骤.先将相对坐标系以O点为中心旋转成坐标轴与绝对坐标系轴平行的坐标系,这里利用极坐标方程.相对坐标系的极坐标方程为

设旋转后得到的坐标系极坐标方程为

由式(7)、(8)可得

平移时需要首先利用S1或S2,S33点的绝对坐标(xS1,yS1)或(xS2,yS2)、(xS3,yS3),求解出O的绝对坐标,由图3可得
由式(8)和(10),就可以计算出目标T在绝对坐标系X′O′Y′下的坐标为

2 仿真分析
在Matlab中对上述坐标解算进行了模拟,传感器监测区域为1 000×1 000(平方单位),分成121个小方格,121个带有声传感器的节点部署在这些小方格的顶点,传感器通信模型采用文献[7]中的概率0.9模型,通信半径为100长度单位.坐标原点位于左边界中点,目标运动轨迹为正弦函数曲线y=400sin(π/500vt),速度v0=50长度单位/s.波速vS为340长度单位/s,按照图1~2原则选取3个传感器节点来计算目标位置,目标到第i(i=1,2,3)个节点的时间差按照Si/vS计算,其中Si为目标到第i个节点的欧氏距离.分别计算t取20以内整数目标的真实位置和计算位置,见图4.

图4 标解算位置与真实位置
从图4可以看出,目标解算位置与真实位置的误差较小,定位效果较好.
3 结 论
本文根据声信号到达不同传感器时所形成的一组时差,经过解算确定目标位置.为简化计算,选取了位于相对坐标系坐标轴上的3个特殊的传感器节点来生成各自的声源双曲线,计算目标在相对坐标系中的位置,再通过坐标转换,得到目标的绝对坐标系位置,从而实现目标定位.简单的数值仿真表明,这种方法具有较好的定位精度.然而,需要建立更贴近实际的节点能耗和通信模型,设置较复杂的定位场景,进行进一步模拟仿真以评估算法在实时和能耗等方面的性能.
[1]王 伟.无线传感器网络若干关键技术研究[D].武汉:华中科技大学,2011.
[2]HARTER A,HOPPER A,STEGGLES P,et al.The anatomy of a context-aware application[C]//Proceedings of the 5th Annual ACM/IEEE International Conference on Mobile Computing and Networking,Seattle:ACM Press,1999:59-68.
[3]BULUSU N,HEIDEMANN J,ESTRIN D.GPS-Less low cost outdoor localization for very small devices[J].IEEE Personal Communications,2000,7(5):28-34.
[4]PRIYANTHA N,CHAKRABORTHY A,BALAKRISHNAN H.The cricket location-support system [C]//Proceedings of International Conference on Mobile Computing and Networking (MobiCom2000),Seattle:ACM Press,2000:32-43.
[5]陈维克,李文锋,首 珩,等.基于RSSI的无线传感器网络加权质心定位算法[J].武汉理工大学学报:交通科学与工程版,2006,30(2):265-268.
[6]张丽霞,汪文勇,李 炯.无线传感器网络的目标定位问题研究[J].电子科技大学学报,2006,35(2):239-241.
[7]周红波.无线传感器网络的目标跟踪算法研究[D].武汉:海军工程大学,2011.
