基于EKF学习方法的BP神经网络汽车换道意图识别模型研究
2013-08-18李亚秋吴超仲马晓凤
李亚秋 吴超仲 马晓凤 黄 珍 张 晖
(武汉理工大学智能运输系统研究中心1) 武汉 430063) (水路公路交通安全控制与装备教育部工程研究中心2) 武汉 430063) (武汉理工大学自动化学院3) 武汉 430063)
0 引 言
据文献[1]数据显示,高速公路上追尾导致的事故占所有事故发生量的9.16%,因此,如何有效的减少追尾事故的问题具有很高的研究价值.随着车路协同技术的高速发展,周围车辆可以相对容易的感知主车的驾驶意图,从而避免追尾事故.本研究通过对本车换道意图的识别来为周围车辆感知本车驾驶意图提供可能性.本车换道意图的识别和行为预测就是根据实时采集来的车辆状态和驾驶人操作信号,来辨识本车驾驶意图和预测驾驶人在下一时间段的驾驶行为[2].因此,在车路协同环境下,基于车辆状态和驾驶人操作信号,建立实时准确的车辆换道意图识别模型,可以有效的避免追尾事故.
当前,已经有关于换道意图识别的相关研究.Liu等[3]提出了用动态隐马尔科夫方法提取和检测换道行为序列,并用模拟驾驶数据验证了模型的可靠性.Kuge[4]使用隐马尔科夫方法建立了模拟器换道意图识别模型,以转向盘转角,转向盘转角向量值,以及方向盘转动转矩作为模型输入.Pentland等[5]使用隐马尔科夫链建立了基于状态序列的驾驶行为预测模型,并用模拟数据验证.Oliver[6]使用双层隐马尔科夫方法识别了7种驾驶意图,并用实车实验数据验证,此研究中,首次将驾驶人眼球运动数据作为驾驶意图辨识模型的输入之一.C.Joel等[7]使用稀疏贝叶斯方法建立了车辆行驶过程中数据采集和换道意图识别系统,并用实车实验数据验证,车辆数据,车道偏离量和驾驶人头部数据作为模型输入.
然而,神经网络作为比较经典的模式识别方法之一,具有很强的自学习能力,识别结果更为可靠,并且具有良好的识别特性,模型参数可调,相比较于以上几种建模方法,具有更广的适用性.考虑到神经网络需要大样本数据作为训练样本,本研究基于中国高速公路实车试验数据,采用神经网络方法来建立换道意图识别模型.同时,考虑到神经网络更新权值算法可能会有不收敛的现象出现,因此,采用基于Kalman滤波算法的BP神经网络来实现换道意图识别.此方法在其他领域已经有 部 分 应 用,R.S.Scalero 等[8-10]提 出 了 基 于Kalman滤波算法的神经网络快速学习算法,提高了前向神经网络的学习速度,学习参数有很高的鲁棒性.曲春晓等实现了卡尔曼滤波算法在飞行器姿态获取系统中的实现,仿真结果显示,卡尔曼滤波器的快速收敛速度和平滑的估计值曲线有很好的应用价值.张良力等[11]提出了驾驶意图研究在机动车安全预警中有重要作用,快速准确的识别驾驶意图可以很好的保证道路交通安全.因此,本研究提出了一种使用基于EKF(extended kalman filter)学习方法的BP神经网络换道意图识别模型,来识别驾驶人的换道意图,并使用高速公路实车实验的数据来验证了本模型的可靠性,模型框架见图1.由于在换道过程中,比较典型的驾驶行为特征是前方车头时距,方向盘转角,驾驶人眼球水平位置移动,以及车辆的车道偏离量,因此,本模型采用以上4类驾驶行为特征数据作为模型输入,采用基于EKF学习方法的BP神经网络进行学习和训练,最终实现换道意图识别.
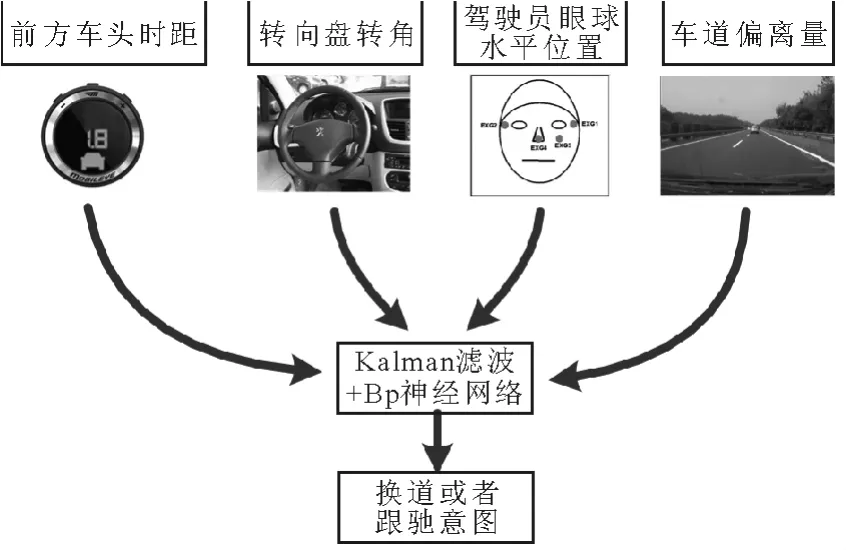
图1 换道意图识别模型框架
1 实验设计与数据采集
1.1 实验参与者
参加实验的20名驾驶人招募于湖北省武汉市出租车集团.驾驶人选拔的条件包括:(1)考虑到安全因素,选择年龄在45~55岁之间,身体健康状况良好的驾驶人,包括10名男性驾驶人和10名女性驾驶人;(2)驾龄在(20±5)a之间,并且年行驶里程在1 000km以上;(3)驾驶人视力正常,无佩戴眼镜情况;(4)参与实验前1d晚上,要保证8h的睡眠时间;(5)参加实验前,被试人员会被告知实验所需了解的注意事项.
1.2 实验过程与采集设备
本次实车实验是从2012年11月~2012年12月,共计2个月.地点是在武汉西北部的汉十高速.每组实验上午09:00从武汉理工大学固定地点出发,沿汉十高速方向,中途在随州服务区休息,随后返回.本次实验分析数据的提取路段为府河收费站到随州服务区,以及随州服务区返回府河收费站之间.
本次实车实验所用数据采集设备有车载CAN总线,Biosemi ActiveTwo测量系统(只针对研究),以及 Mobileye C2-270系统.车载CAN总线主要采集了行驶过程中车辆的转向盘转角数据;Biosemi ActiveTwo测量系统可以采集驾驶人的眼球水平运动位置数据,从而得出驾驶人的视线移动值;Mobileye C2-270系统主要采集了前方车头时距(2.5s以内)和车道偏离量,作为模型输入的一部分.
2 研究方法与数据分析
由于神经网络具有很好的模式识别功能,其映射逼近能力和自学习能力适用于很多非线性问题.神经网络虽然不需要系统确切的数学模型,但需要大量的学习样本(或者训练样本),当样本具有噪声时会导致学习结果具有较大错误甚至不能收敛,致使神经网络失效.同时,神经网络学习速度慢,泛化能力不强等问题限制了其在工程上的应用.而Kalman滤波必须有系统确切的数学模型,以及噪声信息的概率特性,扩展Kalman滤波器(extended kalman filter,EKF)是一种非线性的状态估计方法,可以用来对未知状态进行参数估计.多层神经网络是一种非线性的分层结构系统,其学习算法实际上是对本系统的参数估计过程.由于EKF学习算法可以给出最小的连接权重方差估计,在快速下降效果中收敛性也比后向误差最小算法好,而且,并没有包括对于收敛性能比较重要的调节参数,因此,基于EKF学习算法的神经网络模型具有很高的应用价值.本文将神经网络和Kalman滤波结合,利用了神经网络的非线性能力与Kalman滤波的离线更新特点,克服了神经网络收敛慢的缺点.
2.1 扩展Kalman滤波器
EKF滤波器的基本过程见图2.其中,ut,wt,vt分别为t时刻控制输入,过程噪声和观测噪声.K为Kalman滤波增益为t时刻先验估计值为t时刻后验估计值,f(t,0)和h(t,0)分别为状态更新方程和测量更新方程为t时刻系统均方差,zt为t时刻系统输出测量值.Kalman滤波器的算法分为两个循环往复的步骤:时间更新和测量更新.时间更新,主要指将系统的时间向前移动一格,依据前一时刻的后验估计给出后一时刻的先验估计.该模块包括以下过程.

测量更新,主要是将新时间点的实际测量值加入到算法中,随着卡尔曼系数的不断修正,给出此时刻的后验估计.该模块包括以下过程.

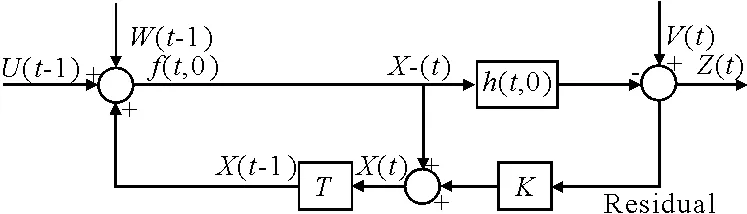
图2 EKF方法基本原理图
2.2 基于EKF的BP神经网络模型
张友民等通过非线性系统建模与辨识的仿真计算结果证明,基于EKF滤波估计的BP神经网络算法,学习收敛速度快,数值稳定性好,所需的学习次数和隐节点数少,调整参数少,便于工程应用.相比较于单纯的BP神经网络学习算法,本模型克服了神经网络的固有缺陷,如收敛速度慢,容易陷入局部最小,数值稳定性差等缺点.
将EKF学习算法和神经网络结合使EKF算法所需的矩阵都大大简化,具体流程:(1)输入神经网络,得到预测;(2)用预测值与实际值的比较进行Kalman滤波的更新;(3)将更新后的权值送回神经网络;(4)下一轮的更新实现Kalman滤波和神经网络结合.把神经网络的权值阈值取出来作为状态估计,网络输出作为Kalman滤波的观测,Kalman的状态方程就大大简化.
在一个3层前向网络中,假设输入层,隐层和输出层神经元数分别为I,L和O,则连接权值组成的状态向量W=[WijWjk](i=1,2,…,I;j=1,2,…,L;k=1,2,…,O).式子中,状态向量W中元素数目为

式中:x(t)为 Kalman滤波权值;e(t)为系统输出的误差;h()函数为神经网络的输出层函数,本模型神经网络传递函数采用sigmoid函数,即:

式中:Xij为前一层神经元j与本层神经元i之间的连接权值;u为神经网络输入;bi为神经元阈值.
2.3 实验数据分析
驾驶人实施换道意图主要有如下步骤:首先,发现前方有车,阻碍本车正常行车速度,产生换道想法;其次,驾驶人向左或向右观测后视镜,权衡是否能成功换道,这是换道意图决策过程;最后,驾驶人转动转向盘,本车向左车道或者右车道偏离,以完成换道过程.因此,换道行为序列见图3.图中数据表示一次向左换道行为的操作序列,模型输入数据包括前方车头时距,驾驶人向右或者向左观察后视镜,车辆的转向盘转角以及车道偏离量.从前方有车,到驾驶人转动头部观察后视镜,以及车道偏离量的变化可以反映出驾驶人的换道意图.提取换道前此序列数据作为神经网络模型输入,建立非线性模型后,使用EKF方法优化权值,从而得出本研究中换道意图识别模型.
本研究分别对基于BP神经网络的换道意图识别模型和基于EKF滤波算法的BP神经网络换道意图识别模型进行训练,训练结果对应的误差均方根曲线见图4~5.从图中可以看出,在1 000次迭代训练之后,EKF滤波算法明显比BP算法收敛速度快,误差小,需要较少的训练迭代次数即可达到模型所需精度要求,所需调整的参数少.经过1 000次迭代之后,前者最终达到训练误差为0.024,高于后者的0.017.本次学习选择的训练样本为200组,测试样本为20组,识别样本为100组,每组数据都包括前方车头时距,转向盘转角,驾驶人头部偏移量和车道偏离量,从检测到前方车辆到换道实施之前,经过数据剔除和筛选,每组样本数据输入向量具有相同的维度,都是708维.学习之后在识别准确率和模型鲁棒性方面,两者并无很大差异,均达到了96%.
多次训练之后的分析结果表明,基于EKF学习方法的BP神经网络在相同的迭代次数下以更快的速率逼近期望的识别效果.

图3 换道行为序列
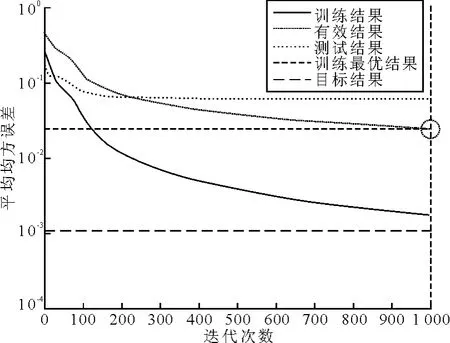
图4 BP神经网络换道意图识别模型训练速率图

图5 基于EKF滤波算法的BP神经网络换道意图识别模型训练速率
3 结束语
本研究结果表明,使用基于EKF学习方法的BP神经网络模型可以很好的识别驾驶人的换道意图,识别效率较高,因此,本研究提出的模型可以减少识别的时间延迟,提高安全预警系统的稳定性.本研究还存在很多不足之处,由于本次研究主要是用离线数据来验证模型的可靠性,进一步工作可以考虑面向实时在线数据来验证模型的可靠性,从而实现驾驶人的在线换道意图识别,在车路协同技术中可以较好的保障行车安全.
[1]公安部交通管理局.中华人民共和国道路交通事故统计年报(2011)[M].北京:人民交通出版社,2011.
[2]王 畅.基于隐形马尔科夫模型的驾驶员意图辨识方法研究[D].长春:吉林大学,2011.
[3]LIU A,PENTLAND A.Towards real-time recognition of driver intentions[C]∥Proceedings of the 1997 IEEE Intelligent Transportation Systems Conference,Boston,MA,Nov.9-12,1997.
[4]KUGE N,YAMAMURA T,SHIMOYAMA O,et al.A driver behavior recognition method based on a driver model framework[J].Society of Automotive Engineers,Inc,1998.
[5]PENTLAND A,LIU A.Modeling and prediction of human behavior[J].Neural Computation,1999(11):229-242.
[6]OLIVER N,PENTLAND A.Graphical models for driver behavior recognition in a smart car[C]∥In-Proc.IEEE International Conference,Intelligent Vehicle,Oct,2000:7-12.
[7]JOEL C,DAVID P,MOHAN M,et al.Lane change intent analysis using robust operators and sparse bayesian learning[J].IEEE Transactions on Intelligent Transportation Systems,2007,8(3):431-440.
[8]SCALERO R S,TEPEDELENLIOGLU N.A fast algorithm training feedforward neural networks[J].IEEE Trans.On Signal Processing,1992,40(1):202-210.
[9]张友民,戴冠中,张洪才,等.一种前馈神经网络的卡尔曼滤波学习方法[J].信息与控制,1994,23(2):55-58.
[10]曲春晓,陈 伟.卡尔曼滤波在飞行器姿态获取系统中的实现[J].交通信息与安全,2011,29 (6):139-142.
[11]张良力,吴超仲,黄 珍,等.面向安全预警的机动车驾驶意图研究现状与展望[J].交通信息与安全,2012,30(3):87-92.
