基于盖革模式APD阵列的非扫描激光三维成像雷达研究综述
2013-08-17赵洪利范有臣孙华燕李迎春
赵洪利,范有臣,孙华燕,李迎春
(解放军装备学院,北京101416)
1 引言
三维激光成像雷达按工作方式可分为扫描和非扫描两种,扫描工作方式成像距离较远,但是需用到复杂的扫描部件,每一幅图像都需要多次扫描,而多次扫描致使成像帧频降低,并且难以对运动物体成清晰图像。非扫描激光三维成像雷达去除了复杂的扫描器件,采用激光对目标场景进行泛光照射,可直接获取目标场景的3-D图像,较传统扫描激光三维成像方法有以下优点:①结构简单,无需高速的扫描器;②对激光脉冲频率的要求低;③降低了发射与接收之间的光束准直要求;④对运动目标可成清晰图像;⑤成像速度快;⑥系统轻小,可靠性高。
目前非扫描激光三维成像雷达仍存在部分扫描过程,主要有5种成像方案:①基于距离选通[1];②基于增益调制[2];③基于条纹管探测器[3];④基于连续波测距成像[4];⑤ 基于 APD(Avalanche Photo Diode)阵列探测器[5]。
距离选通三维成像实质是将探测器对目标的空间扫描转换为时域扫描,探测精度要求越高,则空间扫描所需的切片数越多,成像速度越慢。增益调制型激光三维成像在探测过程中首先得到目标增益恒定的强度像,此时,不同的距离对应的回波增益相同。在采集下一帧图像时,调制ICCD增益,使不同距离处的回波对应不同的增益,进而获得目标的距离信息。增益调制型激光三维成像的速度相比距离选通有较大的提高,但为获取一帧目标图像,需要进行两次探测,因此对高速运动物体探测时成像结果精度难以保证。并且在数据处理过程中对图像信噪比的要求较高,提高测距精度的难度较大。条纹管探测器是一种新型的成像器件,也可以实现对目标距离和强度的同时成像,但是其体积庞大,结构复杂,成像帧频不高,成像距离较近。连续波测距方式有两种:调幅连续波和调频连续波。主要采用增益可调的探测器,如EBAPS(Electron Bombarded Active Pixel Sensor)或者自混频MSM(Metal-Semiconductor-Metal)探测器实现。自混频基本原理是由目标反射信号与本振信号发生混频,当目标距离不同时,混频产生的频差也不同,其频差信息代表了目标的距离信息。相比于脉冲形式的直接探测,连续波探测方式探测灵敏度更高,受背景噪声影响较小,同时能够有效避免各种干扰。但系统结构较为复杂,信号处理量较大,同时对激光能量要求较高,成像距离较近。
工作于盖革模式的APD可以检测到单个光子[6],当用激光脉冲对目标进行照明后,每个APD探测器像元上均对目标进行脉冲飞行时间的测量,从而实现无扫描测距。相比前面介绍的几种成像体制,采用盖革模式探测器的激光脉冲三维成像系统在成像灵敏度和成像速度等参数上体现出了极大的优势:①探测器灵敏度高,测距距离远。②成像速度快。可以实现单脉冲的目标三维成像,所需时间仅与目标距离相关,可以获得最快的成像速度。③系统结构简单,易于小型化。集成计时电路后,盖革模式探测器系统的结构大大简化。
综合以上特点,采用盖革模式探测器的激光三维成像系统有助于解决目前三维成像系统作用距离近,成像速度慢,体积大,能耗高,可靠性差的缺陷。从发展前景来看,APD列阵成像技术方案是目前最具有发展潜力的非扫描三维成像方案,有必要对其研究进展进行综述,掌握最新的发展动态。
2 APD阵列非扫描激光三维成像工作原理
APD的工作方式分为线性模式和盖革模式[7]。当APD的偏置电压低于其雪崩电压时,对入射光产生的光电流起到线性放大的作用,这种工作状态称为线性模式。当偏置电压高于其雪崩电压时,APD增益迅速增加,此时,单个光子吸收即可使探测器输出电流达到饱和,这种工作状态称为盖革模式。在此模式下,单个光子即可使APD的工作状态实现开、关之间的转换。APD具有全固态结构,量子效率高的特点,并可以在高增益下保持良好的信噪比。同时,APD还具有响应速度快、对磁场的敏感度低、体积小、重量轻、功耗低等特点。当对目标进行激光三维成像时,必须采用探测器阵列形式,目前APD探测器阵列的集成方式主要有两种:混合集成技术和单片集成技术。
APD阵列的混合集成技术是将APD阵列和相应的计时控制电路阵列在两块基片上分别独立加工,然后通过桥接的方式将两者集成。这类技术的主要代表是林肯实验室。单片集成技术是将APD和控制电路作为一个整体同时加工,制造出了一体化的APD阵列。单片集成技术的优点是可以有效减小APD阵列的体积,减少数据传输过程引入的各种噪声,在扩大探测器阵列规模和降低器件的制造成本方面具有很大的优势。但是探测器和计时控制电路是特性不同的两类器件,两者虽然可以采用同类工艺加工,但加工的技术要求差异很大,器件的加工精度不易保证。单片集成技术的缺点是只能适用于制作硅基的APD阵列,对于非硅基半导体材料的APD阵列,就只能采用混合集成技术。单片集成技术的主要代表是瑞士洛桑工大和意大利米兰工大。
图1所示为基于盖革模式APD阵列的激光三维成像工作原理示意图。该系统主要由激光器、光学系统、接收器(APD)阵列、处理和显示等五部分组成。脉冲激光经过发射光学系统得到发散光束,照亮整个目标场景;反射回来的光经接收光学系统由APD焦平面阵列接收,每个探测器像元均对目标进行时间的测量,每个像元通过时间测量得到距离值,从而获得角度—角度—距离像,即三维图像。现阶段常见的利用Geiger模式进行测距的方法主要有两种:光子计数测距方法和脉冲飞行时间测距。第一种方法通过统计多次探测的结果确定目标距离,多用于脉冲回波强度弱的情况下,其探测距离远,但成像速度低。第二种方法通过测量发射脉冲与回波脉冲之间的时间来确定目标距离,其测距方法原理简单,电路集成方面有较大的优势。
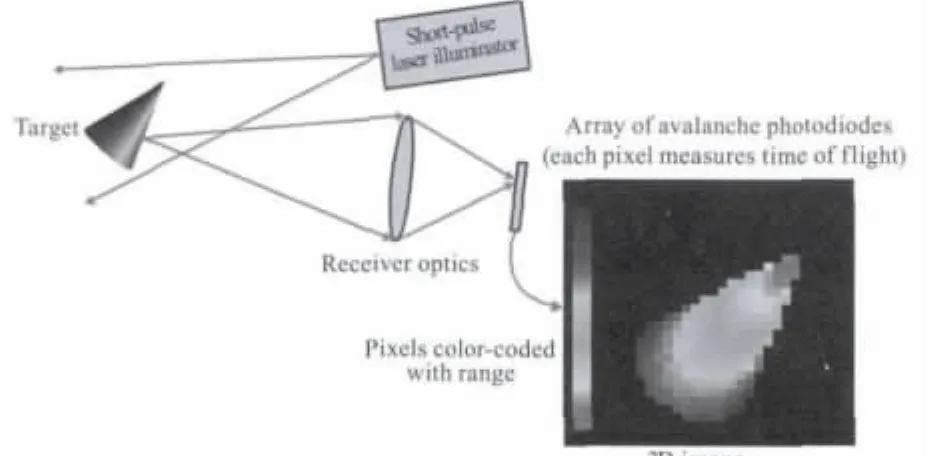
图1 激光三维成像工作原理示意图
3 基于盖革模式APD阵列的激光三维成像国外研究进展
非扫描激光三维成像技术是新一代三维成像技术,美国始终处于领先地位,麻省理工学院林肯实验室的研究成果是这个领域的佼佼者,这里以该实验室的研究进程对基于盖革模式APD阵列的非扫描激光三维成像技术的发展展开综述。
1998年,该实验室首次成功的将雪崩光电二极管阵列与CMOS时间处理电路集成在一个基片上[8],制作成功了4×4盖革模式的APD面阵,自此以后,非扫描激光三维成像一直成为西方发达国家研究的热点。
2002年,该实验室采用4×4大小的盖革APD阵列开发出一种单光子灵敏度的三维激光雷达样机,称为第一代三维成像激光雷达(Gen-I系统)。APD阵列阵元尺寸为100 μm ×100 μm,有效面积30 μm ×30 μm。成像原理如图 2 所示[9-10]。
首先,波长为532 nm的激光脉冲通过可变发散光学元件和1/2波长波板调整偏振。波长为1064 nm和808 nm的激光被带通滤波器滤除,95%的532 nm的激光传输通过。然后,该光束穿过偏振分束器和一个1/4波长板,波长板作为一个发送-接收开关。该系统是单元组态的结构,激光的发射和接收采用同一光学系统,光学孔径的大小为5 cm。4×4检测器阵列的瞬时场和发射激光束的发散角是独立可调的。扫描4×4探测器的瞬时场时,系统的总视场就建立了。一对单轴光栅扫描镜决定了4×4阵列扫描瞬时场的角度范围,并提供高达128×128像素的数据帧。扫描速率和激光脉冲率是同步的,因此4×4阵列可以在脉冲之间移动一个或多个瞬时场。因此,每一帧的128×128像素由32×32块4×4像素组成,每一块都是一个激光脉冲照明得到。目标的反射光同样从扫描镜进入,通过偏振分束器直接进入检测器。从目标返回的光子通过一个窄的带通滤波器后由10∶1的变焦透镜成像到焦平面阵列的。得到32×32和128×128像素的图像的帧速率分别是4.5Hz和0.6Hz,帧速率限制于反射镜扫描电机的速度。图2为3-D激光雷达光学头的功能框图。

图2 3-D激光雷达光学头的功能框图
该样机视场角在0.2~2 mrad之间可调,单脉冲能量为3 μJ,脉冲照明源能量相对较低,适合于图像短程(1 km)的目标。图3为约60m处的车辆的128×128像素数据。x轴、y轴和深度z轴的图像分辨率约2~3厘米。

图3 60米处的车辆的三维成像
图3中左上角为单帧图像显示的面包车,白点为无效点,是由于触发暗电流和背景光造成的。减少白点的一个简单有效的方法是从多帧记录多个脉冲的距离中选择最多点聚集的距离显示。这样做的原因是由于背景光电流和暗电流发生的距离随机分布,而从目标反射光的距离集中分布。图3分别为3帧(右上)、10帧(左下)、110帧(右下)的结果。白点的数目随着帧的数目而降低。
2002年,为了更加实用化,该实验室采用32×32的APD阵列成功研制了Gen-I的微型系统,称为Gen-II[11],该系统采用 Nd∶YAG 固体倍频微片泵浦的Ti:Sapphire激光器,波长为780 nm,重复频率为10 kHz,单脉冲能量为10 μJ。图4为Gen-II系统的光学头。该系统主要用于搭载机载平台进行地形测绘。Gen-II系统安装在了多螺旋桨飞机Sabreliner-40上,通过逃生舱口直接对地面成像,由于盖革模式APD的灵敏度,使该系统覆盖面积比当时最好的商用地形测绘系统提高了10~15倍。

图4 Gen-II系统
2003年,该实验室研制成功了更加坚固和紧凑型的Gen-III系统。该系统依然采用32×32的APD阵列,探测器每个像元集成了500 MHz CMOS数字计时电路。光源使用被动调Q二极管泵浦的固体激光器(波长532 nm,功率33 μJ,脉冲宽度 700 ps,重复频率10 kHz),100 μm 像素张角为333 μrad,距离分辨率为0.15 m。该系统最大的改进在于在焦平面上没有使用微透镜,相反,衍射光学元件被合并到发射光学系统,这将导致只有发射光进入探测器,而抑制掉背景光,这使得该系统能透过树叶的遮挡图直接对目标成像。图5所示为该系统在30英尺高塔上从四个不同的高度上拍摄的图像合并得到的3D图像。

图5 Gen-III系统及3D图像
2005年,林肯实验室在美国 Alabama完成了DARPA支持的Jigsaw计划外场实验[12-13]。机载平台采用UH-1直升机装载整个激光雷达系统,对地面有伪装或隐蔽在植物下的坦克等军事目标进行探测,飞机的飞行高度为150~200 m。该套激光雷达系统采用32×32像元Gm-APD阵列作为探测器,发射系统的激光器为被动调Q二极管泵浦固体倍频微片激光器,输出波长为532 nm,接收孔径为7.5 cm。探测范围覆盖为20 m,采样精度7.5 cm。同样因为探测器阵列尺寸所限,系统采用光束扫描机制,来获得256×256的阵列效果。当UH-1直升机飞过隐蔽在树林中的坦克上空时,从不同的角度对该区域进行拍摄,这时每幅图都会有隐藏目标的局部信息,然后把它们累积在一起,拼接得到比较完整的隐藏坦克的图像。
2009年,林肯实验室开发了一种对紫外波段响应的盖革模式APD器件[14],并制成16×16的盖革模式APD探测阵列应用于激光雷达中,填补了盖革模式APD激光雷达在这一波段不能响应的空白。
除盖革模式探测器阵列的像元数目也获得了极大的提高外,工作波段逐渐扩展。林肯实验室早期研制的盖革模式探测器阵列主要工作于可见光范围,对人眼有较大伤害,对于军事应用也并非理想波段,因此研制人眼安全的近红外以及大气穿透性好远红外探测器成为热点研究方向。
2008年,林肯实验室Younger等成功研制了工作于1.06 μm,基于InP材料的盖革模式探测器阵列,先后研制出像元数分别为 128 ×32[15],256 ×32[16],以及 256 × 64[17]的 Geiger模式探测器阵列。截止2011年,APD阵列大小已经达到256×256[18]。
2008年,Glettler等采用InP材料研制了工作于1.06 μm的盖革模式探测器阵列[19]。同年 Tosi等研制了工作于1.55 μm的盖革模式探测器阵列[20]。此外Rothman等研制了中红外波段的HgCdTe盖革模式探测器阵列[21]。
2008年波音公司(Spectrolab company)使用自己生产的32×32像元的盖革模式APD阵列作为探测器搭建了激光雷达系统[22],用1.06μm波长的激光器发射脉冲能量11μJ、重复频率为10 kHz、脉宽为1.5hs的激光脉冲,发射孔径为2 cm,接收孔径为9 cm,人眼安全距离为8 m,他们用这样的系统进行了外场的试验,完成了3D成像。
4 基于盖革模式APD阵列的激光三维成像国内研究进展
国内在基于盖革模式APD作为探测器的激光雷达研究开始较晚,探测器的发展水平还比较低,目前处于刚刚起步的状态,还没有在实际中得到应用,大部分是对国外系统工作原理的阐述、验证、及其探测器性能的分析。
2008年,南京理工大学寇松峰[23]等通过理论分析和实验平台上的验证试验结果证明基于盖革模式APD作为探测器的光子雷达体制是可行的,测距的精度相比与其他传统探测器的激光雷达具有很大的技术优势。
2009年,南京理工大学电子工程与光电技术学院屈惠明、陈钱[24]两人利用盖革模式APD结合适当的雪崩制电路、PCI高速采集电路以及自制数据采集处理程序设计组建了一个基于盖革模式APD的光子计数探实验系统,讨论了该系统中的关键技术问题,主要为后续的盖革模式APD光子计数探测提供了硬件基础。
2009年,北京航天航空大学刘晓波、李丽[25]提出一种分析盖革模式APD阵列的激光雷达探测性能的方法。他们根据盖革模式APD光电信号响应的特点建立了光电转换的模型,以此分析了盖革模式APD初级光电子和噪声计数率对激光雷达虚警概率、漏警概率和探测概率的影响并进行了仿真分析。
2010年,哈工大王飞[26]等人讨论了盖革模式APD作为探测器的光子雷达测距精度的影响因素,得到回波脉冲强度和脉冲宽度对精度的影响大于其他因素的结论。
2010年,国内上海技物所郭英[27]等利用分立盖革模式探测器对盖革模式成像系统进行了原理验证,实现了对目标的三维成像。
2010年电子科技大学王颖麟[28]等采用波长为1064 nm固体脉冲激光器为激光光源,脉冲重复频率25 Hz,单脉冲能量120 mJ,脉冲宽度10 ns,激光束散角4.5 mrad;接收光学系统设计指标为:接收视场4.24 mrad,接收孔径120 mm,焦距416 mm。利用4×4光纤面阵祸合APD探测器阵列代替面阵探测器进行探测,对830 m左右一处建筑物目标进行试验。在实验中,由于条件限制,像素点个数比较少,无法进行3维图像的融合,初步验证了激光三维成像机理和三维激光成像技术的可行性。
5 总结
以盖革模式探测器为基础的三维成像激光雷达系统具有测距精度高、成像速度快、探测器集成度高、对激光器能量要求低、系统体积小、功耗低等多方面的优势。通过对基于盖革模式APD的三维成像激光雷达发展的分析总结,明确了三维成像激光雷达发展趋势,APD制作材料不再局限于传统的的Si、Ge和InGaAs,并且波长响应范围从可见光扩展到人眼安全波长,APD阵列大小也不断扩展,从最初的4×4发展到现在的256×256。
我国APD探测器阵列刚刚发展,该技术是未来发展的主流,此综述也为我国自主研发高性能三维成像激光雷达提供很好的借鉴。目前国际上APD阵列探测器对我国禁售,国内只能获得4×4大小的阵列,因此未来国内无扫描三维成像激光雷达发展趋势有两个方向,一方面积极开展APD阵列的研制,另一方面寻找APD阵列的替代品,间接得到目标的距离信息,例如通过距离选通技术和增益调制技术得到目标的三维信息。
[1] E Repasi,P Lutzmann,O Steinvall,et al.Advanced shortwavelength infrared range-gated imaging for ground applications in monostatic and bistatic configurations[J].Applied Optics,2009,48(31):5956 -5969.
[2] C Jin,X Sun,Y Zhao,et al.Gain-modulated three-dimensional active imaging with depth-independent depth accuracy[J].Optics Letters,2009,34(22):3550 -3552.
[3] J S Wei,Q Wang,J F Sun,et al.High-resolution imaging of a long-distance target with a single-slit streak-tube lidar[J].Journal of Russian Laser Research,2010,31(4):307-312.
[4] P Adany,C Allen,R Q Hui.Chirped lidar using simplified homodyne detection[J].Journal of Light wave Technology,2009,27(16):3351 -3357.
[5] M A Albota,B F Aull,D G Fouche,et al.Three-dimensional imaging laser radars with geiger-mode avalanche photodiode arrays[J].Lincoln Laboratory Journal,2002,13(2):351-70.
[6] Wang Fei.Researches on performance and range accuracy of laser imaging system based on geiger mode detectors[D].Harbin:Harbin Institute of Technology,2010.(in Chinese)王飞.基于Geiger探测器的激光成像性能及测距精度研究[D].哈尔滨:哈尔滨工业大学,2010.
[7] Wang Rongyang,Yuan Yonggang,Li Xiangyang.Design and realization of APD-based UV speech communication system[J].Optical Communication Technology,2011,35(10):24 -27.(in Chinese)王荣阳,袁永刚,李向阳.基于APD的紫外光语音通信系统设计[J].光通信技术,2011,35(10):24 -27.
[8] B F Aull,A H Loomis,J A Gregor,et al.Geiger-mode avalanche photodiode arrays integrated with CMOS timing circuits[C]//Proc.56 IEEE Device Research Conf.,1998:58-61.
[9] M A Albota,R M Heinrichs,D G Kocher,et al.Three-dimensional imaging laser radar with a photon-counting avalanche photodiode array and microchip laser[J].Appl.Opt.,2002,41(35):7671 -7678.
[10] M A Albota,B F Aull,D G Fouche,et al.Three-dimensional imaging laser radars with Geiger-mode avalanche photodiode arrays[J].Lincoln Laboratory Journal,2002,13(2):351-370.
[11] B F Aull,A H Loomis,D J Young,et al.Three-dimensional imaging with arrays of Geiger-mode avalanche photodiodes[C].Conference on Lasers and Electro-Optics,United states,SPIE,2003:105 -116.
[12] Marino R M,Davis W.A foliage-penetrating 3D imaging laser radar system[J].SPIE,2005,15(1):23 -36.
[13] Liu Xingxin.HgCdTe avalanche photodiode array for LADAR application[J].Laser & Infrared,2012,42(6):603 -608.(in Chinese)刘兴新.碲镉汞雪崩光电二极管在激光雷达上的应用[J].激光与红外,2012,42(6):603 -608.
[14] Shaw G A,Siegel A M,Model J,et al.Deep UV photoncounting detectors and applications[J].Proc.of SPIE,2009,7320(73200J):1 -15.
[15] S Verghese,K A McIntosh,Z L Liau,et al.Arrays of 128×32 InP-based geiger-mode avalanche photodiodes[C].Advanced Photon Counting Techniques III,2009.Orlando,FL,United states:SPIE,2009,7320:73200M -1 -8.
[16] G M Smith,J P Donnelly,K A McIntosh,et al.Reliable large format arrays of geiger-mode avalanche photodiodes[C].International Conference on Indium Phosphide and Related Materials.Versailles,France:IEEE,2008:1 -3.
[17] R D Younger,K A McIntosh,J W Chludzinski,et al.Crosstalk analysis of integrated geiger-mode avalanche photodiode focal plane arrays[C].Advanced Photon Counting TechniquesIII,2009.Orlando,FL,United states:SPIE,2009,7320.
[18] D F Figer,J Lee,B J Hanold,et al.A photon-counting detector for exoplanet missions [J].SPIE,2011,815:81510k.
[19] J B Glettler,P I Hopman,S Verghese,et al.InP-based single-photon detector arrays with asynchronous readout integrated circuits[J].Optical Engineering,2008,47(10):100502.
[20] A Tosi,A Dalla Mora,F Zappa.All-silicon 1.55μm highresolution photon counting and timing[J].IEEE Photonics Technology Letters,2008,20(21 -24):1956 -1958.
[21] J Rothman,G Perrais,P Ballet,et al.Latest developments of HgCdTe E-apds at cea letiminatec[J].Journal of Electronic Materials,2008,37(9):1303 -1310.
[22] R Sudharsanan,P Yuan,J Boisvert,et al.Single photon counting geiger mode InGaAs(P)/InP avalanche photodiode arrays for 3d imaging[C].Proceedings of SPIE.Orlando,FL,United States:SPIE,2008,6950:69500N -1 -9.
[23] Kou Songfeng,Chen Qian,Gu Guohua,et al.Laser ranging system based on 4-element APD arrays[J].Laser& Infrared,2008,38(6):537 -540.(in Chinese)寇松峰,陈钱,顾国华等.基于4元APD阵列的激光测距技术研究[J].激光与红外,2008,38(6):537 -540.
[24] Qu Huiming,Chen Qian.Design of photon-counting detection and imaging experimental setup[J].Opto-Electronic Engineering,2009,36(11):39 -42.(in Chinese)屈惠明,陈钱.光子计数探测与成像实验装置设计[J].光电工程,2009,36(11):39 -42.
[25] Liu Xiaobo,Li Li.Performance analysis of laser radar system using geiger-mode APD array[J].Aero Weaponry,2009,6:35 -38.(in Chinese)刘晓波,李丽.基于盖革模式APD阵列的激光雷达性能分析[J].航空兵器,2009,6:35 -38.
[26] Wang F,Zhao Y,Zhang Y,et al.Range accuracy limitation of pulse ranging systems based on geiger-mode singlephoton detectors [J].Applied Optics,2010,49:5561-5566.
[27] Y Guo,G Huang,R Shu.3d imaging laser radar using geiger-mode apds:analysis and experiments[C].Proceedings of SPIE.Orlando,FL,United states:SPIE,2010,7684:7684021-7684028.
[28] Wang Yinglin.Research of 3D-imaging laser radar system[D].Chengdu:University of Electronic Science and Technology,2010.(in Chinese)王颖麟.3-D成像激光雷达信号处理系统的研究[D].成都:电子科技大学,2010.
