水田小型除草机器人平台控制系统设计与测试
2013-08-16廖文强林建衡区志行詹志勋
齐 龙,廖文强,马 旭,林建衡,区志行,詹志勋
(1.华南农业大学 南方农业机械与装备关键技术教育部重点实验室,广州 510642;2.华南农业大学 工程学院,广州 510642)
机械除草作为一种无化学药剂投入的除草方式,具有污染少、甲烷排放低、利于秧苗生长等优点[1]。目前,日本已相继有一系列的除草机型在水稻生产中应用[2-5];我国在水田中耕除草机具的研制方面虽然相对落后,但是近年来也逐渐发展起来[6-8]。
水田中耕除草机通过水田拖拉机底盘带动除草部件运动进而完成除草作业,然而,由于水稻行、株距较小(标准行距为300mm、窄行距为250 mm;株距为100~140mm),并且机插秧时,一般在地头都会横插几行稻苗,致使中耕除草机在水田作业或地头转弯时,由于人为操作的不准确致使伤苗、压苗现象较为严重。因此,需要研制轻便、智能的除草机器人来提高除草精度,并减少伤、压苗率。
国内外的农田除草机器人的研究主要集中在旱田上[9-12],水田相对较少。在水田除草机器人研究方面,日本做了部分相关研究,其原理是通过无线通信技术把机器人平台采集的图像数据传输到PC机上处理,根据图像处理结果实现自动导航的功能[13]。目前,我国未见水田除草机器人的相关研究。本研究设计的水田小型除草机器人平台控制系统能够无线接收来自计算机的图像处理信息,机器人能够实时根据图像处理结果改变行走路线实现自动导航功能;同时,为了解决因意外致使自动导航失效或地头转弯时无作物行参照的情况,本系统增加了手动遥控功能,可以通过遥控手柄灵活控制机器人应对各种图像处理无法实现的状况。
1 整体架构及描述
水田小型除草机器人平台控制系统原理如图1所示。整个控制系统主要由车载控制模块、PC端转译发射模块、遥控端控制模块3部分组成,实现对机器人平台的2种控制方式:自动导航控制和遥控手柄控制。车载控制模块在同一时间只接受一种控制方式,自动导航模式或手动遥控模式。
当控制系统处于自动导航模式时,摄像机摄取的稻田影像通过无线影音传输器和图像采集卡传送到PC机中进行处理(该导航算法部分本文未涉及),车载控制模块的单片机不断接收由PC端转译发射模块转译的图像处理结果,并由电机驱动电路控制驱动机器人行走的2台电机,实现机器人平台的位姿调整和自律行走。当因意外状况或地头转弯导致自动导航失效时,可采用手动遥控功能,即通过遥控手柄控制机器人的行走。
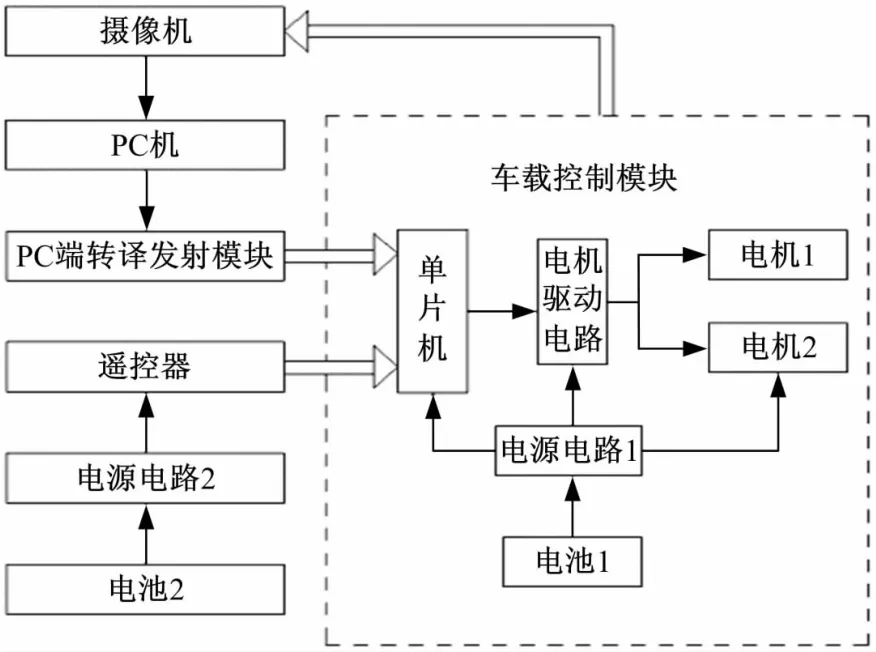
图1 水田小型除草机器人平台控制系统原理Fig.1 Working principle of control system of miniweeding-robot platform in paddy field
2 车载控制模块
2.1 硬件设计
车载控制模块是整个控制系统的核心部分,安装在水田小型除草机器人平台上。主要由nRF905无线收发器、C8051F340单片机、H桥大功率电机驱动电路L9958SB以及电源电路组成,如图2所示。
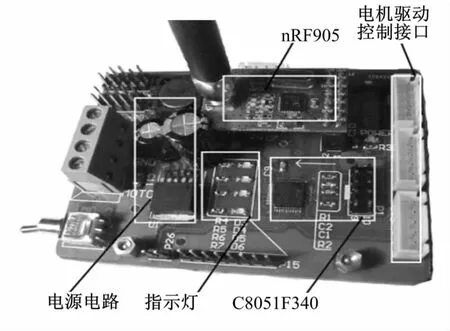
图2 车载控制模块实物Fig.2 Control system on platform
根据复杂的水田环境,选择大功率、大扭矩带编码器的空心杯直流减速电机(JCF765344,Faul haber)作为机器人平台行走的驱动电机,其额定电压为24V、功率为150W、输出转速为60r/min、扭矩为120kg·cm。在电源设计上,车载系统电池采用2块胶体电池(12V-12Ah)串接成24V电源,通过电源芯片LM2596-5.0 及AMS1117-3.3将24V的电池电压转换为稳定的5VDC以及3.3VDC,分别供给外围电路及单片机处理电路。
作为逻辑控制中心的C8051F340单片机通过读取nRF905无线收发器接收到的自动导航信息或者手动遥控命令,将其解码并转译成电机控制命令,通过DI、EN引脚完成电机驱动电路L9958SB的使能,同时通过PWM、DIR引脚来实现正反转脉冲的输入,进而完成对机器人平台行走及转向的控制和机器人运动状态的实时更新,车载控制模块电源及电机控制电路如图3所示,其中 U1为5VDC-DC芯片 LM2596,U2为REG1117-3.3V稳压芯片,U3 为单片机C8051F340,U4为 H桥驱动芯片L9958SB,D1、D7为肖特基二极管,F1为10A保险丝,M为直流减速电机。
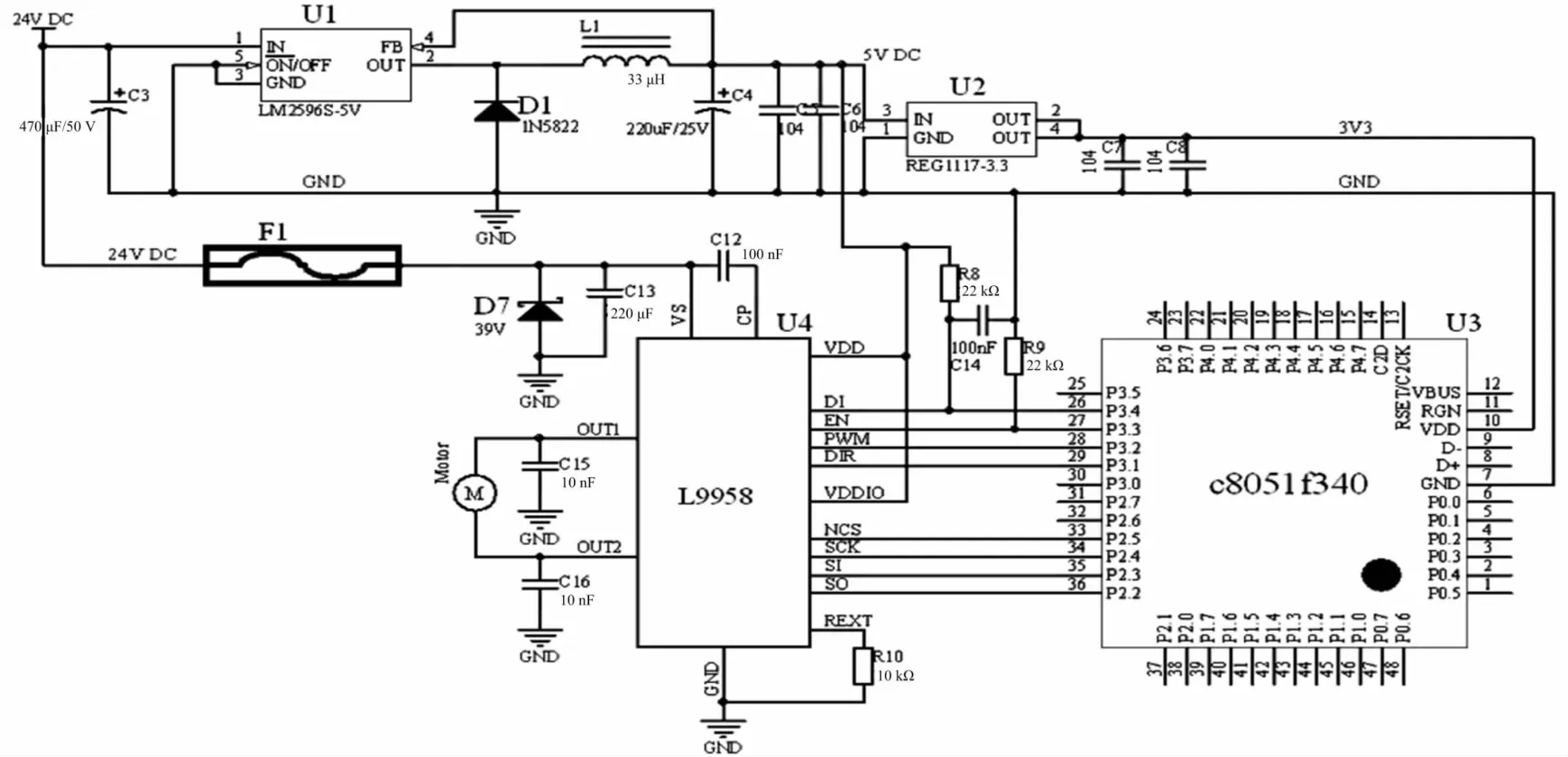
图3 车载控制模块电源及电机控制电路Fig.3 Circuit diagram of control system on platform
2.2 软件设计
在软件设计上,采用状态机的思想,详细明确地划分逻辑功能模块,提供统一控制参数;在源代码的可读性及软件容错性上提供了很好的支持。
车载控制模块的软件设计划分为4个部分(见图4),分别为系统启动的初始化、状态管理、电机驱动程序以及数据反馈程序。
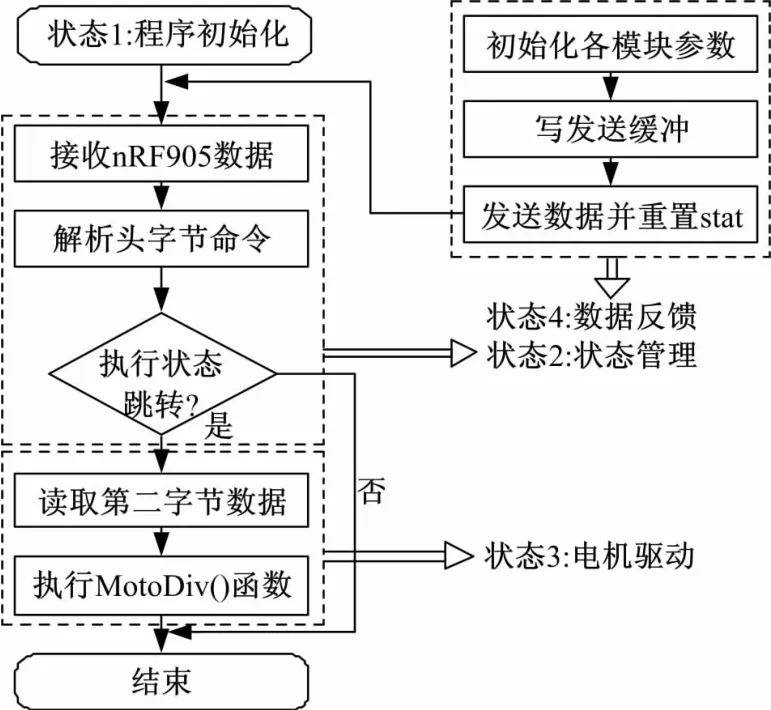
图4 车载控制系统状态流程图Fig.4 State flow chart of control system on platform
程序初始化后,状态管理程序主要完成根据回读数组的首字节实现各个状态的跳转;电机驱动程序主要功能是在判别空中接口的指令为电机控制命令后,转入电机状态更新函数,根据回读数组的第2字节和电机状态命令表的对比更新电机状态;数据反馈程序主要用于扩展,该程序根据上位机读取车体各传感器参数重置系统,车载控制模块状态流程如图5所示。
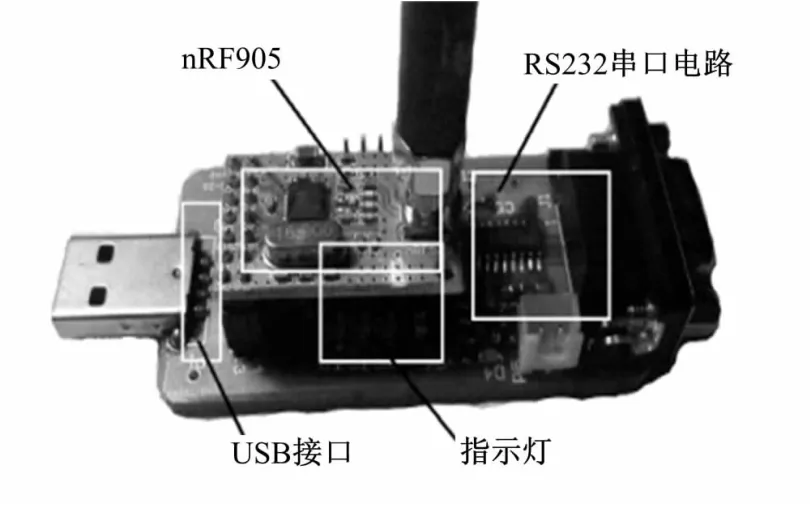
图5 PC端转译发射模块实物Fig.5 Information translation and sending module on PC
机器人平台动作的控制是通过固定长度的脉冲信号,使左右电机各自转动一定的角度以实现循迹运动,其脉冲宽度取决于硬件系统的最高响应精度。平台转角控制计算公式如下:

式中:ψ为转动角度(rad);T为脉冲宽度(ms);V 为履带线速度(m/s);NL、NR为输入左、右电机驱动芯片的脉冲数。
3 PC端转译发射模块
3.1 硬件设计
PC端转译发射模块主要由RS232串口通信电路、nRF905无线收发器、单片机C8051F340、电源电路、LED指示灯、USB供电及扩展接口组成(见图5),其主要作用是完成PC机与车载控制模块间的通信连接。系统中与电脑通信的接口是RS232串口,亦可在模块中加载USB驱动,实现与电脑的USB通信。
PC端转译发射模块的核心是串口对无线接口的转换处理,模块通过串口电路RS232与PC机进行有线的数据交换,数据通过C8051F340单片机内置对码表实现有线到无线的转换,从而把对应的命令无线发送到车载控制模块上并实现各个功能,PC端转译发射模块电路如图6所示,其中U1为nRF905无线收发器,U2为单片机C8051F340,U3为 MAX232电平转换芯片,U4为 REG1117-3.3V稳压芯片。
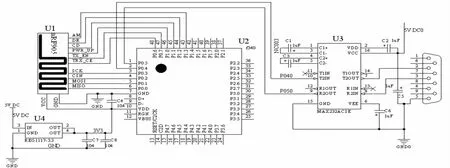
图6 PC端转译发射模块电路Fig.6 Circuit diagram of information translation and sending module on PC
3.2 软件设计
PC端转译发射模块上的单片机C8051F340芯片除了处理启动各硬件电路之外,主要完成从电脑读取串口数据,并解析出其准确含义,从而执行相应的功能。程序结构主要由4部分组成:程序初始化、状态管理、参数管理及控制管理。
程序初始化后,状态管理程序主要根据程序执行状态,实现对应前台执行状态跳转的功能;控制管理程序主要管理PC端自身通信的主从性,根据电脑上位机发送的参数判断控制命令的需要,实现参数回读的射频接收状态跳转,或者小车运动控制的射频发送状态跳转;参数管理程序的功能是当上位机发送“r”命令,先向机器人平台发送参数回读命令,接着自身设置射频模块为接收等待状态,等待机器人平台的参数回传,PC端转译发射模块状态流程如图7所示。
PC机通过一个字节8位的字符数据(单次发送的最大信息量)发送控制命令,共定义了9个有效命令,其他数据定义为“空命令”,不执行功能。表1为PC机对转译发送模块的命令接口。
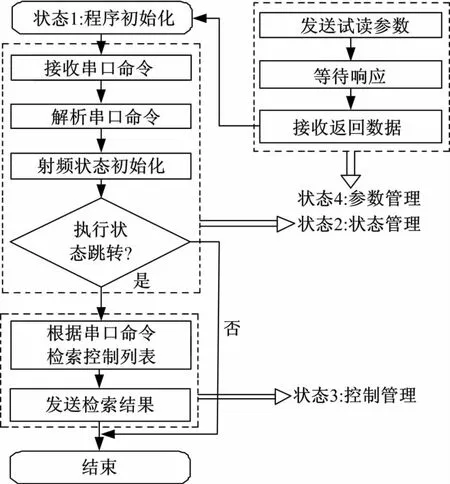
图7 PC端转译发射模块状态流程图Fig.7 State flow chart of information translation and sending module on PC
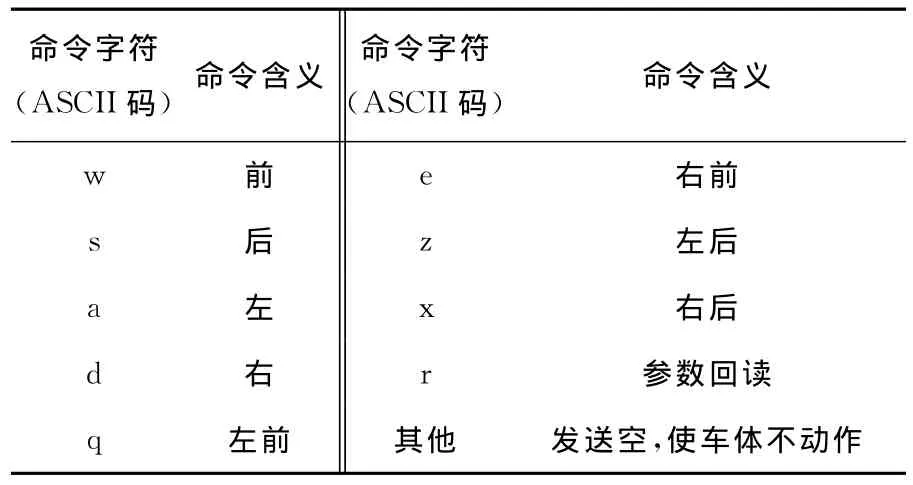
表1 串口命令接口Table 1 Serial command interface
4 遥控端控制模块
4.1 硬件设计
本研究采用了标准航空模型的遥控器,该遥控模块采用摇杆式方位控制,提供了8个不同的方位信息输出,即前、后、左、右、左前、左后、右前、右后。遥控端控制模块主要由标准航空模型遥控器的部分电路、改装接口、C8051F340单片机、nRF905无线收发器及电池仓组成,如图8所示。
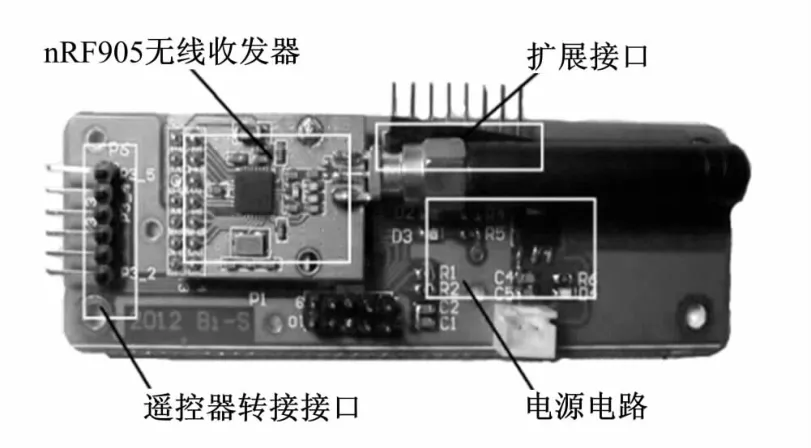
图8 遥控端控制模块Fig.8 Control module of remote device
在本研究中,由于航模遥控器的无线输出接口并不能兼容nRF905无线通信数传方式,而硬件上屏蔽了器件提供的8方位遥控输出,因此,设计时仅保留了9VDC转5VDC的供电电路,将摇杆输出接口改为接入基于C8051F340单片机的信号转译发射模块中。
转译发射模块实现的功能比较简单,向航空模型遥控器提供摇杆的扫描接口,向除草机器人平台提供nRF905无线通信接口。遥控器采用6节5号干电池供电,通过内部的7805稳压电路供给系统工作,图9为遥控端控制模块电路,其中U1为单片机C8051F340,U2为REG1117-3.3V稳压芯片,U3为nRF905无线收发器,U4为78X05稳压芯片,U5为遥控器上的8向摇杆模块。
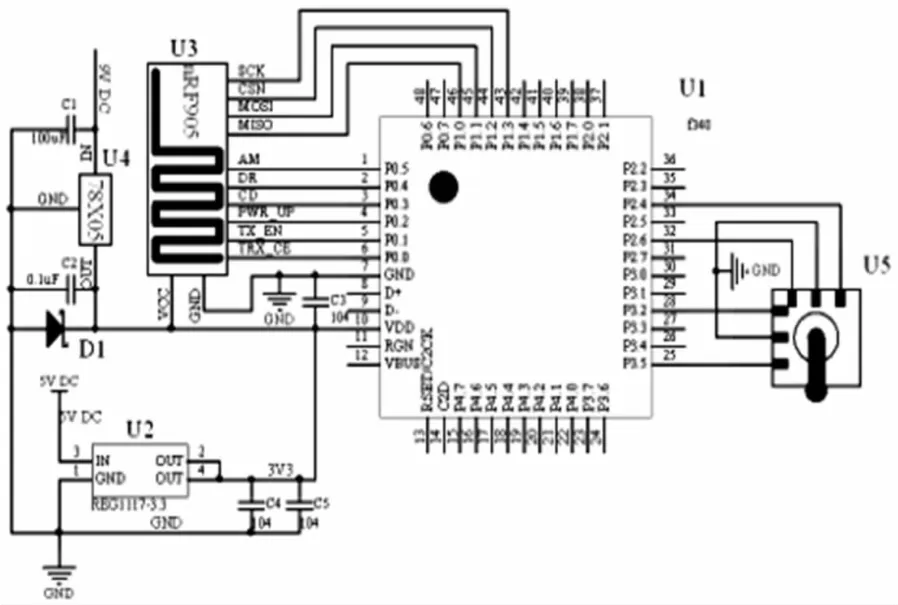
图9 遥控端控制模块电路Fig.9 Control module of remote device
4.2 软件设计
遥控端控制模块的程序执行流程较为简单。遥控器的功能是随时扫描摇杆接口的状态,并将其转换为nRF905数据传输接口统一的下位机控制命令,并执行nRF905无线收发器的驱动程序将命令发送于下位机,如图10所示。
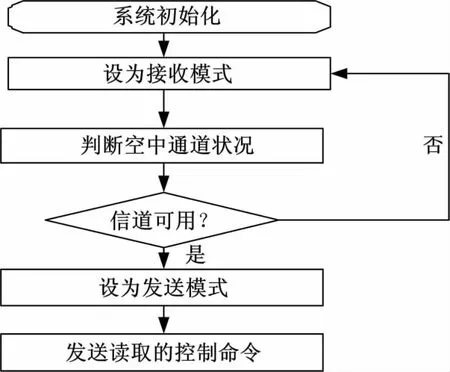
图10 遥控端控制模块状态流程图Fig.10 State flow chart of remote-device control module
5 机器人行走平台控制系统测试
本研究设计的水田小型除草机器人平台总体尺寸为400mm×240mm×500mm(长×宽×高),整机重量为15kg。在华南农业大学跃进区机插秧试验田(泥脚深度约300mm,秧苗高度约350mm;杂草主要以水田稗、千金子、丁香蓼和酸模叶蓼等杂草为主,平均高度约为40mm)对机器人行走平台控制系统和除草性能(除草部件采用课题组设计的机械弹性触觉除草器,除草率和伤苗率的测试方法同文献[9])进行了水田环境下测试。测试时,分别使用PC机和遥控手柄发送运动指令控制平台运动,测试参数如下:车速为0.2m/s;单个电机电流为2.5A;单个电机输出功率为60W;控制灵敏度为30ms;控制距离(最远)为100m;除草率为81.3%;伤苗率为3.6%。
测试结果表明:所设计的水田小型除草机器人行走平台控制系统可控制机器人在水田环境下稳定行走,PC机和遥控手柄控制都具有良好的控制灵敏度,遥控距离、平台行走速度及除草性能均满足田间作业要求。
6 结 论
(1)基于C8051F340单片机设计了一种包括车载控制模块、PC端转译发射模块和遥控端控制模块的水田小型除草机器人行走平台控制系统,可实现自动导航及手动遥控两种控制方式,达到了水田复杂环境下控制系统稳定性及灵敏性要求。田间测试结果表明:平台行走速度为0.2m/s,控制系统反应时间为30ms,控制距离最远可达到100m;配置机械弹性触觉除草部件时除草率为81.3%,伤苗率为3.6%,满足田间智能除草作业要求。
(2)控制系统在硬件上采用模块化设计,提供易于平台升级的控制接口及多种传感器的扩展接口;在软件上采用状态机机制,具有良好的可扩展性和可读性,为机器人的功能扩展奠定基础。
[1]马旭,齐龙,梁柏,等.水稻田间机械除草装备与技术研究现状及发展趋势[J].农业工程学报,2011,27(6):162-168.Ma Xu,Qi Long,Liang Bai,et al.Present status and prospects of mechanical weeding equipment and technology in paddy field[J].Transactions of the Chinese Society of Agricultural Engineering,2011,27(6):162-168.
[2]和同産業株式会社.水田の草取り機[P].日本专利:4057492,2007-12-21.
[3]株式会社美善.水田除草兼用溝切り機[P].日本专利:2007105006,2007-04-26.
[4]独立行政法人農業·食品産業技術総合研究機構,株式会社クボタ,井関農機株式会社.水田除草機[P].日本专利:3965430,2007-06-08.
[5]三菱農機株式会社,株式会社キュウホー.除草機[P].日本专利:2007105006,2007-04-26.
[6]王金武,牛春亮,张春建,等.3ZS-150型水稻中耕除草机设计与试验[J].农业机械学报,2011,42(2):75-79.Wang Jin-wu,Niu Chun-liang,Zhang Chun-jian,et al.Design and experiment of 3ZS-150paddy weeding-cultivating machine[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(2):75-79.
[7]吴崇友,张敏,金诚谦,等.2BYS-6型水田中耕除草机设计与试验[J].农业机械学报,2009,40(7):51-54.Wu Chong-you,Zhang Min,Jin Cheng-qian,et al.Design and experiment of 2BYS-6type paddy weeding-cultivating machine[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(7):51-54.
[8]齐龙,马旭,谭祖庭,等.步进式水田中耕除草机的研制与试验[J].农业工程学报,2012,28(14):31-35.Qi Long,Ma Xu,Tan Zu-ting,et al.Development and experiment of marching-type inter-cultivation weeder for paddy[J].Transactions of the Chinese Society of Agricultural Engineering,2012,28(14):31-35.
[9]Jeon Hong Y,Tian Lei F.Direct application end effector for a precise weed control robot[J].Biosystems Engineering,2009,104:458-464.
[10]Astrand Bjorn,Baerveldt Albert-Jan.An agricultural mobile robot with vision-based perception for mechanical weed control[J].Autonomous Robots,2002,13:21-35.
[11]郭伟斌,陈勇.基于模糊控制的除草机器人自主导航[J].机器人,2010,32(2):204-209.Guo Wei-bin,Chen Yong.Fuzzy control based autonomous navigation for a weeding robot[J].Robot,2010,32(2):204-209.
[12]张春龙,黄小龙,耿昌兴,等.智能锄草机器人系统设计与仿真[J].农业机械学报,2011,42(7):196-199.Zhang Chun-long,Huang Xiao-long,Geng Changxing,et al.Design and simulation of intelligent weeding robot system[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(7):196-199.
[13]光井輝彰,広瀬貴士,岩澤賢治,等.水田用小型除草ロボット(アイガモロボット)の開発[R].高岐阜県情報技術研究所研究報告,第10号,2009.
