衰减转向盘冲击力矩的电动助力转向控制
2013-08-16李绍松宗长富刘明辉魏文若
李绍松,宗长富,何 磊,刘明辉,魏文若,吴 浩
(1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022;2.中国第一汽车集团公司 技术中心,长春 130011)
电动助力转向(Electric power steering,EPS)兼顾汽车低速轻便性和高速稳定性的要求[1-2],被广泛应用于乘用车上。目前,对于 EPS的研究,主要集中在减轻驾驶员驾驶负担和提高驾驶舒适性两方面,包括助力特性的设计[3]、各种补偿控制策略、主动回正控制[4]等。
国外在通过EPS衰减路面干扰引起的转向盘振动方面做了很多研究。文献[5]分析了路感信息与路面干扰在频率上的差异,对估计的电机角速度进行高通滤波,确定路面干扰补偿电流进行补偿控制,衰减路面干扰产生的转向盘振动,而不丧失路感信息,该方法起到很好的控制效果,但实际应用时高通滤波器的实现相对比较困难。文献[6]提出两种控制方法,改善汽车在不平路面上的操纵舒适性,而且不丧失路感信息。一种是对电机位置信号进行高通滤波,通过EPS补偿控制衰减路面冲击;另一种则是通过半主动悬架的连续阻尼控制,保证汽车在崎岖道路上有良好的操纵性能。这两种控制方法都取得了很好的控制效果,但是通过EPS控制时,同样也涉及信号的高通滤波。目前国内在通过EPS衰减路面干扰引起的转向盘振动方面研究相对较少。
本文通过转向盘转角、转矩信号的变化量进行路面干扰的检测,避免了对EPS信号的高通滤波。首先,通过建立的电动助力转向动力学方程估计出折算到转向小齿轮上的路面冲击力矩。然后,确定路面冲击补偿电流,衰减作用在转向盘上的冲击力矩。最后通过实车试验验证了该方法的控制效果。
1 折算到转向小齿轮上的路面冲击力矩估计
折算到转向小齿轮上的路面冲击力矩是在EPS系统动力学模型的基础上估算的,因此首先需要建立EPS系统动力学模型。
转向柱助力式EPS结构简图如图1所示。
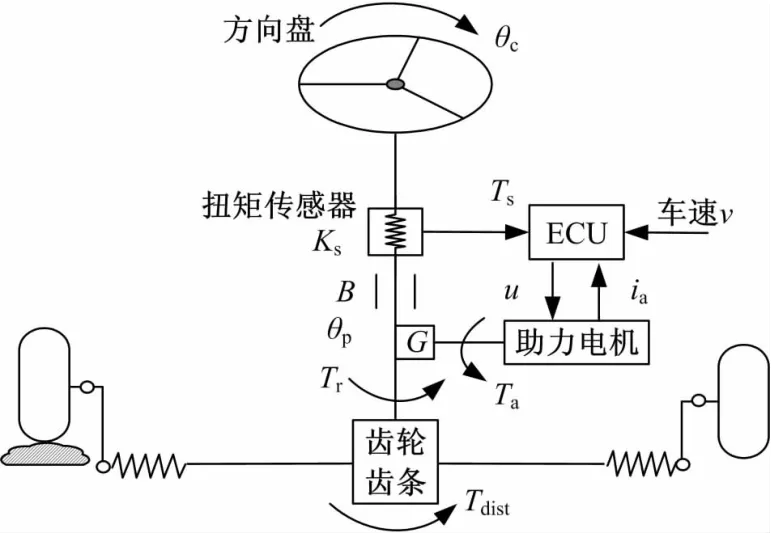
图1 电动助力转向结构Fig.1 Steering mechanism with EPS
驾驶员转向力矩由安置在转向盘和助力电机之间的扭矩传感器检测得出。根据扭矩传感器信号确定出电机的目标控制电流,电机的实际电流由电流传感器检测得出,通过PID控制消除电机目标电流与实际电流的偏差。电机的输出力矩通过减速机构作用在转向柱上,电机输出力矩与减速机构减速比的乘积为电机的助力矩。驾驶员转向力矩与电机助力矩一起克服转向系统阻力矩。根据牛顿定律建立该系统的动力学方程[7-8]。
转向盘到小齿轮的动力学方程为
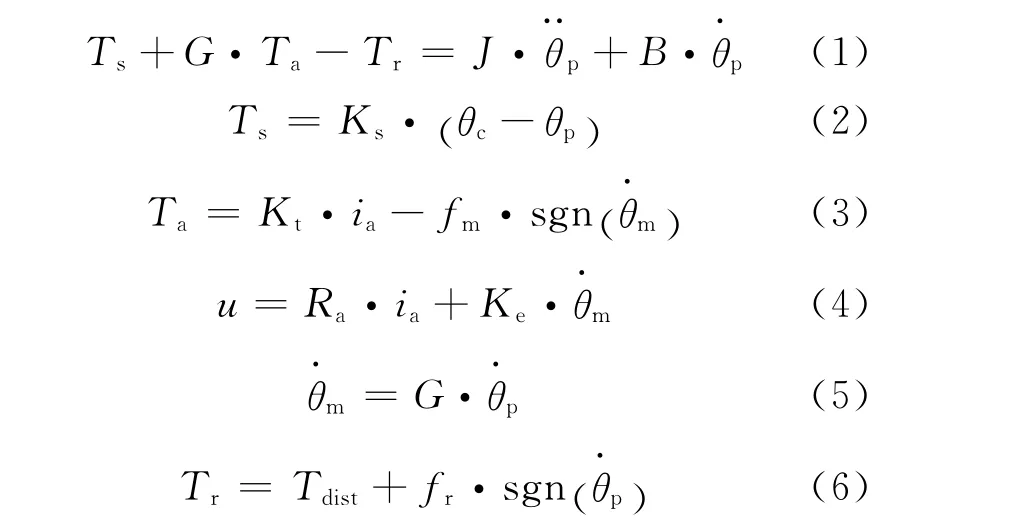
式中:Ts为扭矩传感器测得的力矩信号;Ta为电机输出力矩;Tr为作用在转向柱上的转向阻力矩;J为转向系统等效在转向柱上的转动惯量;B为转向系统等效在转向柱上的阻尼;θp为转向小齿轮转角;θc为转向盘转角;Ks为扭矩传感器扭杆的扭转刚度;G为助力电机到转向柱的减速比;Kt为电机转矩系数;fm为电机摩擦力矩;u为电机电枢两端电压;Ra为电机绕阻电阻;ia为电机电枢电流;Ke为电机电动势常数;Tdist为折算到转向小齿轮上的路面冲击力矩;fr为转向器摩擦力矩。
式(1)是转矩传感器以下到小齿轮的动力学方程;式(3)(4)是电机的动力学方程。
由式(1)(3)(5)(6)整理得:

电机角速度信号由式(4)得出:

根据式(8),只要知道电机的电枢电压和电机电流信号,就可以估计出电机的角速度。扭矩传感器输出力矩Ts、电机输出力矩Ta可以分别通过扭矩传感器、电机电流传感器信号计算得到,转向系统的参数如下:J=0.046kg·m2;B=0.35N·m·s·rad-1;G=15;系统摩擦力矩=1.0N·m;Kt=0.053N·m·A-1;Ke=0.053 V·s·rad-1;Ra=0.16Ω。因此可以根据式(7)估计出折算到转向小齿轮上的路面冲击力矩。
2 衰减转向盘冲击力矩控制方法
衰减转向盘冲击力矩控制时首先对转向系统当前状态进行判定,只有判定出有路面冲击时才进行控制。
根据转向系统中转角、转矩传感器的变化量进行转向系统的状态判定。当检测出转向盘转角变化量较小、转向盘力矩变化量相对较大时,认为有路面冲击。这需要设定转向盘转角、转矩变化范围的门限值,门限值设定的是否合适关系到衰减转向盘冲击力矩控制方法的控制效果。转向盘转角、转矩变化量的门限值大小与路面冲击力矩的检测周期有关,具体数值根据试验车型调试得出。EPS控制周期为1ms,60个EPS控制周期作为一个路面冲击检测周期。计算出一个路面冲击检测周期内转向盘转角、转矩的变化量,如果转向盘转角变化量在±8°之内,转矩变化量在±0.4 N·m之外,认为有路面冲击,其中转矩和转角的门限值通过实车试验调试获得。
衰减转向盘冲击力矩控制逻辑框图如图2所示。
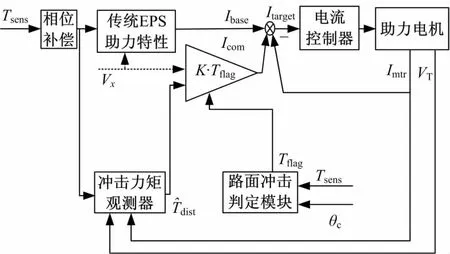
图2 衰减转向盘冲击力矩控制逻辑框图Fig.2 Control logic diagram to reduce impact torque on steering wheel
图2中的冲击力矩观测器是根据式(7)搭建的,路面冲击判定模块的输入是转向盘转角、转矩。根据转向盘转角、转矩的变化量判定出有路面冲击时,置图2中的Tflag为1。路面冲击力矩补偿电流Icom按照公式Icom=·K·Tflag计算得出,式中K为路面冲击力矩补偿系数。确定的路面冲击补偿电流施加在EPS基本助力电流上,用以衰减路面冲击产生的转向盘冲击力矩。
3 衰减转向盘冲击力矩控制试验
试验车型为装有EPS系统的国产某小型轿车,前轴载荷为1105kg。EPS控制器及数据采集系统如图3所示。其中,数据采集系统由PC机、工控机及接线板组成。EPS控制器基于Freescale公司的MC9S12DG128芯片开发完成。
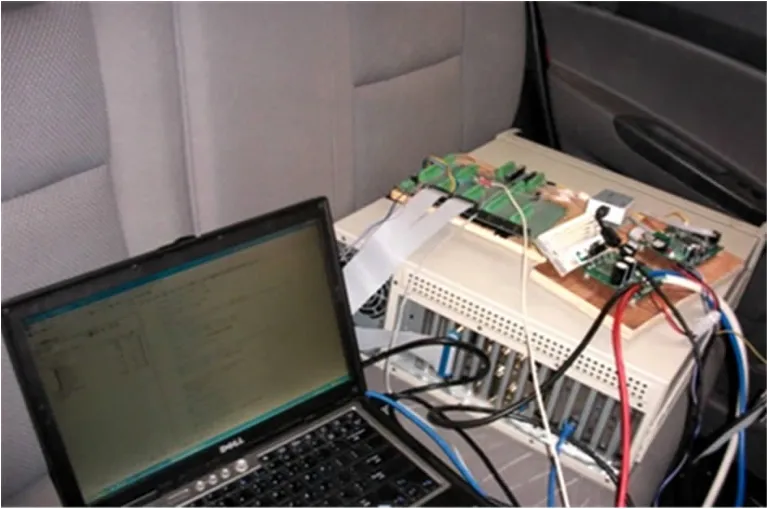
图3 EPS控制器及数据采集系统Fig.3 EPS controller and data acquisition system
实车试验是在校园环境内进行的,试验时试验车以30km/h分别通过凸块和不平路面来产生路面冲击。
(1)过凸块试验
汽车30km/h直线行驶经过凸块来产生路面冲击,如图4所示。

图4 过凸块试验Fig.4 Vehicle test over a bump
图5为汽车过凸块时有无控制时的转向盘力矩对比曲线,数据处理时进行了截止频率50Hz的低通滤波处理,因此看起来比较平滑。
由图5可以看出,汽车过凸块时转向盘冲击力矩的幅值由2N·m降到1.3N·m左右,降低了0.7N·m。试验结果表明,衰减转向盘冲击力矩控制方法能够有效衰减作用在转向盘上的冲击力矩。但并没有将转向盘上的冲击力矩完全衰减,此时驾驶员能够感觉到来自路面的反馈信息,所以驾驶员并不丧失路面信息。

图5 过凸块时转向盘力矩对比曲线Fig.5 Steering torque when vehicle over a bump
图6为汽车过凸块时转向盘力矩的功率谱密度对比曲线。由图6可以看出,衰减路面冲击控制方法能把频率为12~20Hz的功率谱密度能量幅值由-30dB降低到-40dB,在其他频率段内功率谱密度能量幅值基本保持不变,因此衰减转向盘冲击力矩控制方法能够衰减过凸块时转向盘上的振动能量。
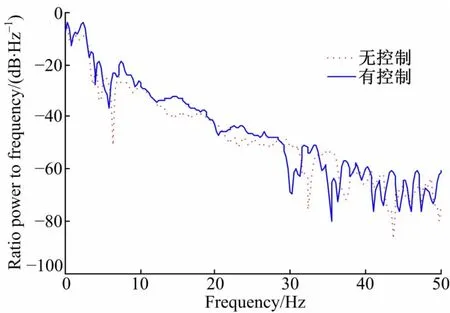
图6 过凸块时的功率谱密度对比曲线Fig.6 Power spectral density when vehicle over a bump
(2)汽车经过不平路面试验
汽车以30km/h直线行驶经过不平路面来产生路面冲击,如图7所示。

图7 过不平路面试验Fig.7 Vehicle test on rough roads
图8为汽车经过不平路面时转向盘转矩的对比曲线。可以看出汽车经过不平路面时转向盘冲击力矩幅值由1.5N·m降低到1.0N·m,过不平路面时转向盘的振动频率在12~15Hz。试验结果表明衰减转向盘冲击力矩控制方法够有效衰减路面冲击产生的转向盘上的冲击力矩,并使驾驶员不丧失路面信息。
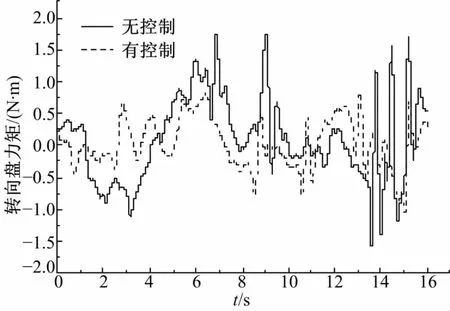
图8 过不平路面时的转向盘力矩对比曲线Fig.8 Steering torque when vehicle on rough roads
图9为经过不平路面时转向盘力矩的功率谱密度对比曲线。可以看出衰减路面冲击控制方法能把频率为12~15Hz的功率谱密度能量幅值由-65dB降低到-76dB,在其他频率段内功率谱密度能量幅值基本保持不变。试验结果表明,衰减转向盘冲击力矩控制方法能够降低汽车过不平路面时转向盘上的振动能量。

图9 过不平路面时的功率谱密度对比曲线Fig.9 Power spectral density when vehicle on rough roads
4 结 论
(1)通过转向盘转角、转矩变化量进行路面冲击的判定,可不涉及EPS信号的高通滤波,并给出了转向盘转角、转矩变化量的具体限值。
(2)建立冲击力矩观测器,估计折算到转向小齿轮上的路面冲击力矩,确定路面冲击补偿电流,施加在EPS基本助力电流上衰减转向盘上的冲击力矩。
(3)实车试验结果表明,提出的衰减转向盘冲击力矩控制方法能有效衰减作用在转向盘上的冲击力矩,提高驾驶舒适性。
[1]施国标,申荣卫,林逸,等.电动助力转向系统的建模与仿真技术[J].吉林大学学报:工学版,2007,37(1):31-36.Shi Guo-biao,Shen Rong-wei,Lin Yi,et al.Modeling and simulation of eletric power steering system[J].Journal of Jilin University(Engineering and Technology Edition),2007,37(1):31-36.
[2]孟涛,余卓平,陈慧,等.电动助力转向控制策略研究及试验验证[J].汽车技术,2005(5):26-30.Meng Tao,Yu Zhuo-ping,Chen Hui,et al.A study on the control strategy for electric power steering and test validation[J].Vehicle Design,2005(5):26-30.
[3]赵学平,李欣,陈杰,等.电动助力转向系统助力特性曲线动态修正方法及其应用[J].机械科学与技术,2009,28(10):1281-1286.Zhao Xue-ping,Li Xin,Chen Jie,et al.A dynamic amending method for the steering characteristic of an electric power steering system and its application[J].Mechanical Science and Technology for Aerospace Engineering,2009,28(10):1281-1286.
[4]赵景波,贝绍轶,陈龙.汽车EPS回正工况模糊PID控制及试验[J].郑州大学学报:工学版,2011,32(5):112-116.Zhao Jing-bo,Bei Shao-yi,Chen Long.Fuzzy-PID control and test of automotive EPS system under return-to-center condition[J].Journal of Zhengzhou University (Engineering Science),2011,32(5):112-116.
[5]Sugiyama Akinobu,Kurishige Masahiko,Hamada H,et al.An EPS control strategy to reduce steering vibration associated with disturbance from road wheels[C]∥SAE Paper,2006-01-1178.
[6]Seongjoo Kim,Jonghyun Pyo.A control strategy for kickback reduction using electric power steering and combined chassis control[C]∥SAE Paper,2007-01-3658.
[7]Kurishige M,Wada S,Kifuku T,et al.A new EPS control strategy to improve steering wheel returnability[C]∥SAE Paper,2000-01-0815.
[8]吴浩.电动助力转向系统建模及其助力特性的研究[D].长春:吉林大学汽车工程学院,2003.Wu Hao.Modeling of electric power steering system and research on it's assist characteristic[D].Changchun:College of Automotive Engineering,Jilin University,2003.