仿生越沙杖结构设计及性能数值分析
2013-08-16张四华李建桥
张 锐,张四华,刘 芳,李建桥
(吉林大学 工程仿生教育部重点实验室,长春 130022)
0 引 言
旅行杖是人们从事户外旅行运动时使用的辅助器械。根据研究,行走时使用旅行杖可以减少至少22%的施予腿部和膝盖等部位的肌肉和关节上的力,从而减轻因疲劳而引起的关节和肌肉的疼痛[1]。近年来,随着人们对沙漠旅游、探险的喜爱,以及对沙漠资源勘探的渴求,沙漠旅行设备逐渐成为人们关注的焦点。目前,旅行者们穿越沙漠旅行时使用的旅行杖大多数是传统登山杖。传统登山杖主要面向山坡、灌木丛区等泥质和岩石地面越野运动而设计,重点考虑了提高抓地能力和耐磨损性能,较少考虑越沙性能。使用传统登山杖在松软沙漠中旅行时,经常发生沉陷、滑移、挑沙等现象,这时旅行杖不但没有起到辅助旅行、减轻疲劳的作用,反而成为旅行者的负担。如果能够有效解决传统登山杖在沙漠中使用的不利因素,提高旅行杖的越沙性能,对于使用者更好完成沙漠、戈壁地带的旅行、勘探等作业,以及开发沙漠地带旅游资源和矿产资源具有重要意义。
在生物界里,经过35亿年的进化和生存竞争,产生了很多可在各种环境中无障碍运动的高手,通过自然界物竞天择和长期的进化,它们对自然环境已经具有高度的适应性,运动机能和器官结构远比人类曾经制造的机械更为完善[2]。目前,通过工程仿生学技术,将自然界中生物的优异性能应用于工程实际越来越广泛,并且取得了较好的效果[3-5]。鸵鸟是世界上生活在沙漠中最大的平胸类鸟,它不会飞翔,在沙地环境中超强的奔跑能力和持久耐力非常引人瞩目。鸵鸟在行走和奔跑时,足部具有优异的固沙、抗沉陷和抗滑移性能[6-7]。本文以鸵鸟足为生物原型,根据鸵鸟足结构和越沙机制,采用工程仿生学技术,设计出仿生越沙杖,通过数值模拟仿生越沙杖与沙土之间的作用关系,并对照普通越沙杖模拟结果,验证了仿生越沙杖具有良好的抗沉陷、高承载和固沙的优越性能。
1 鸵鸟足越沙性能分析
鸵鸟原产于非洲和阿拉伯沙漠温差较大的地区,主要生活在空旷的沙漠地带和干燥无树的大草原。鸵鸟属于平胸类鸟,胸骨扁平不具龙骨突起,锁骨退化,前肢演化成翅膀,已经退化不能飞翔,但后肢强壮而有力,在沙地环境中具有稳健、持久和高速奔跑的能力,如图1所示。鸵鸟每一步跨越距离可达3.5~7m,持续奔跑速度约50~60km/h,冲刺速度超过70km/h,并可维持约30 min而不感觉累,是鸟类中名副其实的赛跑健将,也是陆地上跑得最快的两条腿动物[8]。

图1 沙地上奔跑的鸵鸟Fig.1 Running ostrich on sand
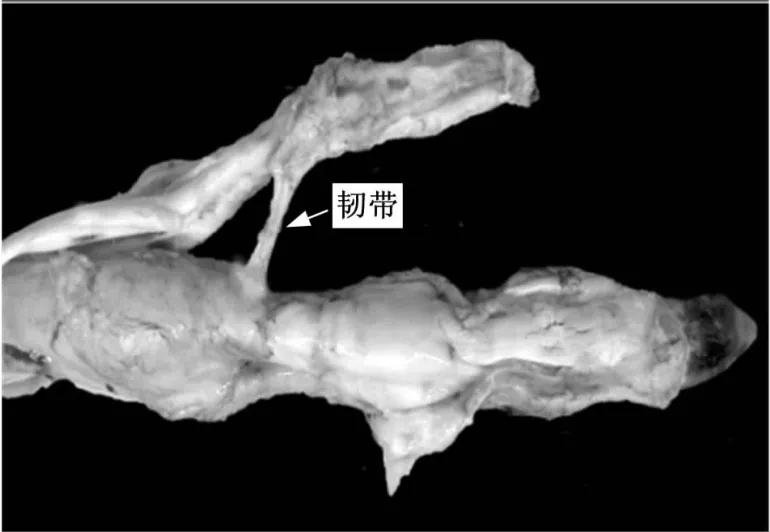
图2 鸵鸟足连接两趾的韧带Fig.2 Ligament linking digits of ostrich foot
通过解剖发现,鸵鸟足第Ⅲ趾和第Ⅳ趾之间有一条韧带,这条韧带将两趾紧密连接在一起,如图2所示。当鸵鸟足接触地面时,两趾张开,由韧带连接处形成的跖骨-趾骨垫增大了足趾与沙地的接触面积,提高了抗沉陷能力;当鸵鸟足脱离地面时,韧带使两趾并拢,减少了阻力,提高了行进速度。图3为鸵鸟足第Ⅲ趾垫的微观形貌。通过生物体视显微镜观察发现,鸵鸟足趾垫具有与骆驼相似的柱状密集乳突。这些柱状乳突的尺寸和形貌将随着鸵鸟足底的受力情况发生变化,受力最大部位的柱状乳突粗大密集,起到弹性缓冲作用,有助于减少对沙子的冲击扰动作用。通过实验研究发现,当鸵鸟足着沙而支撑体重时,乳突群因受压而向周围扩展,以增大与地面的接触面积,有效阻止了沙地上鸵鸟足的沉陷,提高了承载能力。经过测量计算,鸵鸟足从着沙到完全进入承载状态,趾垫面积会增大15%以上。当鸵鸟足离沙时,随着负荷的减小,乳突群回缩并恢复至原状,减少了趾垫面积,有效降低了鸵鸟足挑沙和刮沙的可能,减少了前进阻力[9-10]。

图3 鸵鸟足第Ⅲ趾垫的微观形貌Fig.3 Foot pad microstructure of 3rd digit
图4为鸵鸟足底外观及足印。通过鸵鸟足底形貌和足印发现,在鸵鸟行走尤其是奔跑时,鸵鸟足第Ⅲ、Ⅳ趾间跖骨-趾骨垫相对于两趾具有内凹结构,并且鸵鸟足第Ⅲ趾垫的前后部位凸出,中间部位凹陷。鸵鸟足第Ⅲ趾在运动过程中几乎承载了全部身体重量,通过与具有相似结构特征的骆驼足底形貌及固沙性能对比分析发现,这种前后凸出与中间凹陷的结构特征,有助于提高鸵鸟越沙过程中的固沙限流作用[6,11]。
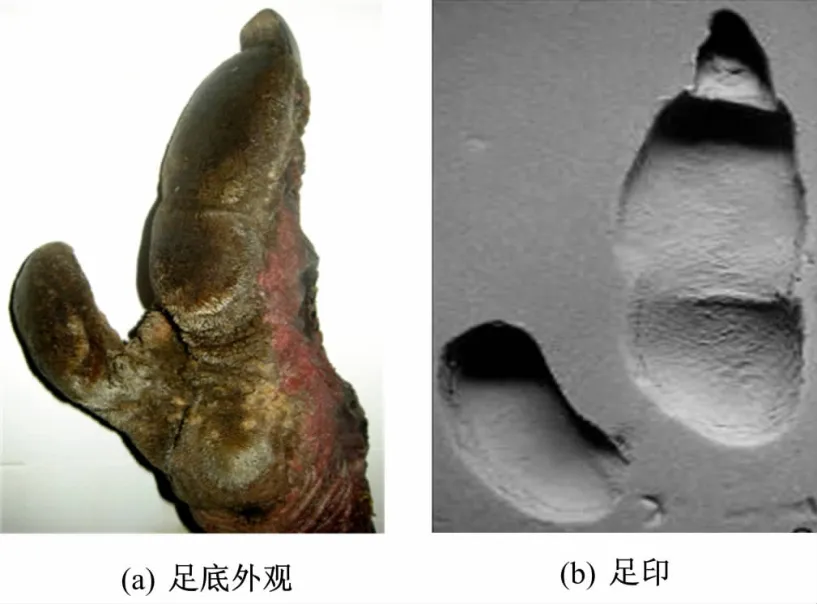
图4 鸵鸟足底形貌Fig.4 Plantar surfac of ostrich foote and ostrich footprint
2 仿生越沙杖设计
2.1 结构设计
通过鸵鸟足底形貌、结构及足印研究表明,鸵鸟足具有适宜沙地行走和奔跑的优异特性。以鸵鸟足为生物原型,基于鸵鸟足底结构形貌以及优异越沙机制,在传统旅行杖的基础上,通过对杖托进行仿生设计,研制一种具有抗沉陷、高承载和固沙限流的仿生越沙杖。图5为仿生越沙杖全貌图。
考虑到便携性和多功能性,仿生越沙杖的杖身和杖尖为一体,杖身为多节结构,由套管套接而成,杖身和仿生杖托采用可拆卸设计,靠近杖尖的杖身下段螺接杖托的上托盘中,在回位弹簧的作用下,圆锥状杖尖伸出下托盘的尺度发生变化。图6为仿生杖托刚性骨架结构。仿生杖托刚性骨架由上托盘、八根上支架杆、八根下支架杆、回位弹簧以及下托盘组成。回位弹簧固定在上托盘和下托盘之间,八根上支架杆的上端通过螺栓和螺母铰接在上托盘的外缘,八根下支架杆的下端通过螺栓和螺母铰接在下托盘的外缘,下支架杆的上端通过螺栓和螺母铰接在相对应的上支架杆的下段处。仿生杖托刚性骨架的八根上支架杆和八根下支架杆的外周分别覆设柔性蒙皮,形成仿生越沙杖的杖托整体。柔性蒙皮是由两层耐高温、耐磨损工业布中间夹设高弹性橡胶,以缝合线缝合而成。柔性蒙皮的弹性变形率在200%以上。
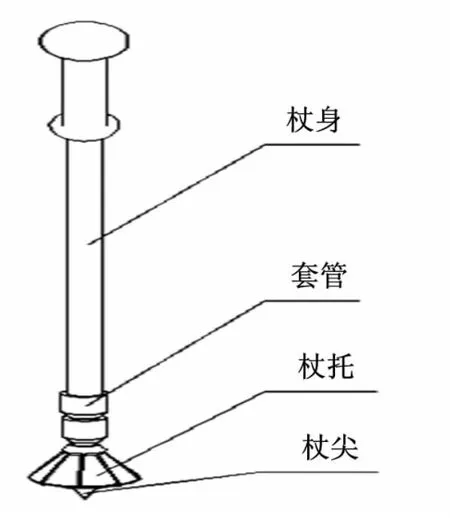
图5 仿生越沙杖Fig.5 Bionic hiking stick on sand

图6 仿生杖托刚性骨架结构Fig.6 Rigid framework structure of bionic stick tray
2.2 仿生越沙杖工作原理
仿生越沙杖的入沙过程实际上就是杖托的不同阶段工作状态。杖托在入沙过程中经历了三种状态,如图7所示。在触沙初始状态时,杖尖最顶端插入沙表面,同时,杖托的下托盘刚刚接触到沙表面,此时回位弹簧还没有受力,整个杖托处于初始状态,此时,α=30°,β=120°;在承载中间状态时,下托盘与下支架杆处于同一平面上,顶角α达到极限值,这时杖托与沙面接触面积达到最大值,此时,α=60°,β=30°;在极限承载状态时,回位弹簧达到极限压缩状态,这时上支架杆向内收缩,起到收缩固沙的作用,此时,α=55°,β=14°。根据垂直载荷大小和沙子软硬程度,仿生越沙杖的杖托能够自动改变结构及底部与沙的接触面积,从而达到抗沉陷、高承载和固沙限流的效果。

图7 仿生越沙杖入沙的工作状态Fig.7 Work states moving into sand of bionic hiking stick
当仿生越沙杖入沙(加载)时,杖托下托盘和杖尖首先着沙,随着承载重量的增加,杖托克服弹簧的反作用力,顶角α(上支架杆与上托盘之间的夹角)逐渐增大,两支架杆夹角β逐渐减小,下支架杆围成部分内表面逐渐与沙面接触,并承载一定的载荷;然后,上支架杆围成部分内表面(外悬部分)也与沙面全部接触。随着下托盘的继续上升,顶角α越过极限值60°后,将稍微减小,支架上杆也会向内稍微收缩,起到固沙的作用,直至最后下托盘运动到极限位置,此时杖托与沙接触面积比初始触沙时增大了数倍,由杖身传递过来的负荷几乎全部传递给杖托,作用在杖托下表面与沙面接触的各个地方。在极限承载状态下的杖尖属于零负载或轻负载状态,杖尖不会继续下陷,同时杖尖周围的沙子在杖托受载下不断缩紧,从而有效地防止杖尖晃动和滑移。当仿生越沙杖出沙(卸载)时,随着杖身负荷的撤消,杖托在弹簧反作用力的作用下,首先上支架杆围成部分与沙面接触的内表面与沙面分离,其次下支架杆围成表面与沙面分离,最后下托盘和杖尖离开沙面。这种逐级卸载,逐渐减少与沙地的接触面积,同时结合杖尖与上支架杆尖端都是倒圆锥形,有助于减少杖头部分对沙土的冲击扰动,防止了杖头产生“挑沙”现象。
3 仿生越沙杖性能分析
3.1 仿生越沙杖入沙过程离散元模拟系统
为了分析仿生越沙杖的越沙性能,采用离散元分析软件PFC2D®建立越沙杖入沙过程模拟系统,并从宏、细观角度对越沙杖与沙土相互作用关系进行分析。图8为仿生越沙杖触沙初始状态的离散元模拟系统,右侧图为沙土离散元力学模型。在沙土离散元力学模型中,沙土颗粒之间接触的弹性和非弹性性质用弹簧和阻尼器来表示。弹簧代表沙土颗粒的弹性,阻尼器代表沙土颗粒的非弹性,用带有摩擦因数的滑块来表示沙土颗粒之间的摩擦。
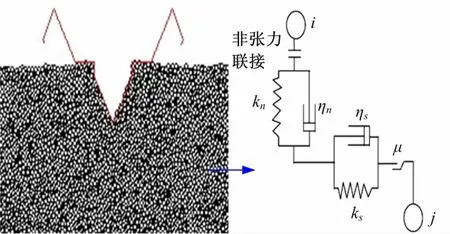
图8 仿生越沙杖触沙初始状态的离散元模拟系统Fig.8 DEM simulation system of bionic hiking stick at the initial contacting sand state
基于散体介质宏、细观物理力学参数量纲分析以及颗粒流双轴压缩试验仿真分析,可建立散体介质宏观力学特性与细观接触本构模型参数之间的关系[12-13]。本文选取沙漠沙土作为实验介质,沙漠沙土的基本性能参数如下:密度为1.5g/cm3,孔隙比为0.68,内摩擦角为29°,内聚力为0 kPa,剪切变形模量为16.7mm。通过反复模拟与对照,最终获得能够反映沙漠沙土力学特性的离散元模型参数如下:密度为1.58g/cm3;法向刚度为107N/m;切向刚度为2.5×107N/m;摩擦因数为0.65;颗粒半径为1.25~1.8mm;初始孔隙率为0.7;法向临界阻尼比为0.84;切向临界阻尼比为0.62。
为了评价仿生越沙杖的越沙性能,针对仿生越沙杖入沙时杖托尺寸的变化,设计了对应仿生越沙杖工作状态下的三种普通越沙杖的杖托结构。为了与仿生越沙杖入沙三种工作状态进行对比,将其简称为普通越沙杖入沙的三种工作状态。普通越沙杖与仿生越沙杖相比,在不同入沙工作状态下,两种越沙杖的杖尖大小和伸出尺寸相同,杖托触沙部分的横向尺寸相同,并且普通越沙杖杖托始终平行于水平面,而杖托结构和纵向尺寸不随工作状态发生变化,如图9所示。

图9 普通越沙杖入沙的工作状态简图Fig.9 Sketch map of work states moving into sand of common hiking stick
3.2 仿生越沙杖入沙过程数值模拟
通过越沙杖入沙过程离散元模拟系统,对仿生越沙杖入沙过程中杖托与沙土相互作用关系进行数值模拟。图10为不同入沙工作状态时仿生越沙杖杖托下不同沙土接触力场。接触力场中的直线段宽度代表接触力的大小,直线段通过每个接触位置,并朝向接触力的方向。从图10可见,在触沙初始状态时,杖尖侧面沙土的接触力较大,杖托的作用尚不明显;在承载中间状态时,杖托支架最外侧内收边缘使杖托内侧面沙土的接触力变大,并存在斜向延伸到杖尖的趋势;在极限承载状态时,杖托支架向内收缩形成弧形内收曲面,使杖托内的沙土压实,接触力场明显变大,尤其在杖尖上端侧面位置的沙土接触力明显增大,增强了杖尖的固着效果。因此可以看出,在承载中间状态和极限承载状态时,仿生越沙杖具有优越的固沙限流作用。

图10 仿生杖托下沙土接触力场Fig.10 Contact force fields of sand under bionic stick tray
图11为仿生越沙杖杖托下沙土速度场。速度场中的直线段长度代表速度的大小,箭头指向速度矢量方向。从图11可见,在触沙初始状态时,杖托刚刚接触沙土,沙土颗粒在杖尖的挤压作用下向周围扩散;在承载中间状态时,杖托最外侧内收作用使边缘沙土难以直接向外扩散,并在杖托下压作用下有朝杖尖方向运动的趋势,对杖尖存在一定挤压作用;在极限承载状态时,杖托上支架杆构成的内收缩表面进一步使杖托下沙土朝向杖尖方向运动,在杖托内曲面边缘、杖尖外表面以及底层沙土的共同作用下,杖托下沙土已经形成“暂态固体”,使插入其中的杖尖不易产生晃动、滑移,同时越沙杖传来的负载力直接作用在“暂态固体”上,有效改善了仿生越沙杖的抗沉陷和高负载效果。

图11 仿生杖托下沙土速度场Fig.11 Velocity fields of sand under bionic stick tray
图12为两种越沙杖杖托的承载力与沉陷量关系曲线。从图12可见,随着承载力增加,在越沙杖触沙初始状态时,由于只有杖尖插入沙土中,并且杖托触沙面积较小,因此沉陷量迅速增加,同时两种越沙杖的沉陷量随承载力变化基本相同;在承载中间状态和极限承载状态时,由于越沙杖杖托面积增大,杖托在抗沉陷方面发挥重要作用,因此沉陷量增加程度明显减缓并趋于稳定状态。由于模拟土槽具有一定的深度,当越沙杖沉陷一定程度以后,杖托下的沙土基本不再变化,沉陷行为也变得平缓,因此从曲线上看二者在承载-沉陷关系的区别就变得较小,这时承载力将继续增加。另外,相同承载力条件下的仿生越沙杖沉陷量总是明显小于普通越沙杖,表明仿生越沙杖具有更优越的抗沙沉陷性能。
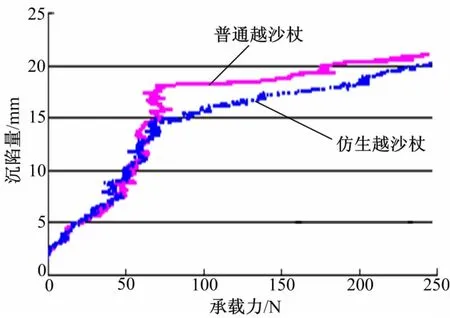
图12 两种杖托的沉陷量与承载力关系曲线Fig.12 Relations between bearing capacities and sinkages of stick trays
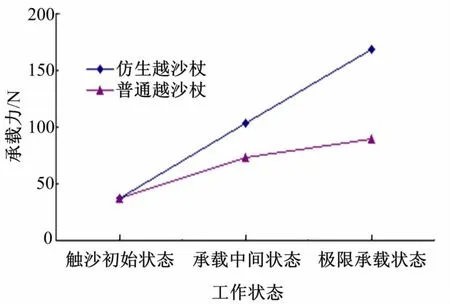
图13 杖托在不同工作状态时的承载力变化Fig.13 Variations of bearing capacities under different work states of stick trays
图13示出了两种越沙杖杖托在不同工作状态时的承载力变化情况。从图13可见,随着越沙杖的入沙行进,仿生越沙杖和普通越沙杖的承载力均增加,前者基本呈线性增加,而后者在极限承载状态时反而减小。同时,除了在触沙初始状态时承载力相等以外,在其他工作状态时仿生越沙杖的承载力均大于普通越沙杖,并且在极限承载状态时达到差异最大值。这一现象与越沙杖入沙过程细观分析相一致,表明仿生越沙杖具有较好的承载能力。
4 结束语
通过鸵鸟足连接两趾的韧带、趾垫微观形貌、足底形貌以及足印研究表明,鸵鸟足具有适宜沙地行走和奔跑的优异特性。基于鸵鸟足底结构形貌以及优异越沙机制,以鸵鸟足为生物原型,在传统旅行杖的基础上,通过对杖托进行仿生设计,研制了一种仿生越沙杖。该仿生杖托可根据越沙杖垂直荷载和沙土软硬程度自动改变结构及杖托与沙土的接触面积。仿生越沙杖在入沙过程中需要经历触沙初始状态、承载中间状态和极限承载状态。通过越沙杖入沙过程离散元模拟系统,对仿生越沙杖入沙过程三种工作状态进行了数值模拟,对照普通越沙杖的模拟结果,对杖托下接触力场、速度场、沉陷量和承载力进行了分析,结果表明:仿生越沙杖具有优越的固沙限流、抗沉陷和高承载性能,能够作为沙漠旅行装备,更好地协助旅行者在沙漠环境中徒步活动。
[1]Jacobson B H,Caldwell B,Kulling F A.Comparison of hiking stick use on lateral stability while balancing with and without a load[J].Perceptual and Motor Skills,1997,85:347-350.
[2]任露泉,梁云虹.生物耦合生成机制[J].吉林大学学报:工学版,2011,41(5):1348-1357.Ren Lu-quan,Liang Yun-hong.Generation mechanism of biological coupling[J].Journal of Jilin University (Engineering and Technology Edition),2011,41(5):1348-1357.
[3]Lu Y X.Significance and progress of bionics[J].Journal of Bionics Engineering,2004,1(1):1-3.
[4]柏龙,葛文杰,陈晓红,等.星面探测仿生间歇式跳跃机器人设计及实现[J].机器人,2012(1):32-37.Bai Long,Ge Wen-jie,Chen Xiao-hong,et al.Design and implementation of a bio-inspired intermittent hopping robot for planetary surface exploration[J].Robot,2012(1):32-37.
[5]李杰,庄继德,魏东,等.沙漠仿生轮胎与普通轮胎牵引性能的对比试验[J].吉林大学学报:工学版,2006,36(4):510-513.Li Jie,Zhuang Ji-de,Wei Dong,et al.Comparative traction performance tests between bionic camel foot tire and common tire[J].Journal of Jilin University(Engineering and Technology Edition),2006,36(4):510-513.
[6]Schaller N U,D′Août K,Villa R,et al.Toe function and dynamic pressure distribution in ostrich locomotion[J].The Journal of Experimental Biology,2011,214:1123-1130.
[7]Jindrich D L,Smith N C,Jespers K,et al.Mechanics of cutting maneuvers by ostriches(Struthio camelus)[J].The Journal of Experimental Biology,2007,210:1378-1390.
[8]Arnold C.Ostriches and Other Flightless Birds[M].Minneapolis:Lerner Pub Group,1990.
[9]Zhang R,Zhang S H,Li X J,et al.Relationship between foot structure morphology and ostrich traveling ability on sand[C]∥Proceedings of International Bionic Engineering Conference, Boston,USA,2011.
[10]El-Gendy S A A,Derbalah A,El-Magd M E R A.Histo-morphological study on the footpad of ostrich(Struthio camelus)in relation to locomotion[J].Journal of Veterinary Anatomy,2011,4(2):77-97.
[11]王志浩,裘熙定,季学武.驼足与沙地相互作用的研究[J].吉林工业大学学报,1995,25(2):1-7.Wang Zhi-hao,Qiu Xi-ding,Ji Xue-wu.The research of reciprocal action between camel shoe and sand[J].Journal of Jilin University of Technology,1995,25(2):1-7.
[12]张锐,李建桥,李因武,等.部件复杂表面影响土壤扰动行为的离散元宏细观分析[J].吉林大学学报:工学版,2009,39(5):1218-1223.Zhang Rui,Li Jian-qiao,Li Yin-wu,et al.DEM macroscopic and mesoscopic analysis in disturbed behavior of soil acted by part with complex surface[J].Journal of Jilin University (Engineering and Technology Edition),2009,39(5):1218-1223.
[13]Zhang R,Zhou G F,Chen G M,et al.Research on the nonlinear mechanical model of cohesive soil based on distinct element method[J].Advanced Science Letters,2011,4(4/5):1500-1508.