形态/柔性材料二元仿生耦合增效减阻功能表面的设计与试验
2013-08-16田丽梅高志桦王银慈任露泉
田丽梅,高志桦,王银慈,任露泉,商 震
(1.吉林大学 工程仿生教育部重点实验室,长春 130022;2.吉林大学 汽车工程学院,长春 130022)
研究表明,生物以其形态、结构、材料等多个因素的联合作用呈现多种功能,实现对环境的最大适应性,将生物的这种“联合作用”称之为“生物耦合”[1-2]。通过生物耦合形成具有如减阻[3-4]、降噪[5]、脱附[6]、耐磨[7]、隐形[8]等特定功能。生物界中很多与生存环境协调的问题都是通过表面结构实现的,比较典型也是比较有争议的当属海豚快速游动之谜。尽管海豚有着完美的流线型体态,被认为是其快速游动的原因之一[9-10],然而,众多的试验研究[11-12]和模拟研究[13]表明其特殊的皮肤构造也是其快速游动的主要原因。海豚皮肤外层由一层很薄且柔软的表皮-角质层构成,而与角质层相互嵌连在一起的是真皮层,角质层和真皮层具有不同的硬度和弹性模量,当海豚快速游动时,受到水压作用,角质层和真皮层耦合在一起,形成宏观上的ridges,这就是海豚快速游泳之谜的其中一种解释[11-12]。受这种特殊皮肤结构的启发,本文设计了一种材料/形态二种因素耦合而成的仿生功能表面,并对这种二元耦合功能表面在离心式水泵叶轮上的实现方法进行了探索,进而对其增效减阻功能进行了试验研究。
1 形态/材料二元仿生耦合功能表面的设计
1.1 仿生信息的获取与处理
首先对海豚皮肤结构进行生物信息的提取,经简化建立仿海豚皮肤结构如图1(a)所示。仿海豚皮肤分上下两层结构,其材质的硬度及弹性模量不同。底层结构由具有如图1(b)所示的非光滑形态且弹性模量较大的真皮层构成,其上的非光滑形态主要由截面形态为矩形和半圆形两部分组成,矩形的底长为L,深度为H,两个非光滑单元之间的间距为D,D大概为2L,而表层是由与底层相互啮合的非光滑形态及弹性模量较小的角质层组成,如图1(c)所示。其中底部半圆直径为R′,深度为H′,两个非光滑凸起之间的距离为D′,同样D′大概为2L′,上下两层非光滑结构相互嵌合,因此,L=L′,D=D′,H =H′。上述基层和面层形成的功能性表面,在流体压力的作用下,由于表面材质硬度及弹性模量不同,其表面会随着流体压力的不同,呈现出一种动态的非光滑,体现了面层和基层之间形态与材料因素的一个动态的耦合过程,相应的这种表面也称之为动态耦合功能表面。
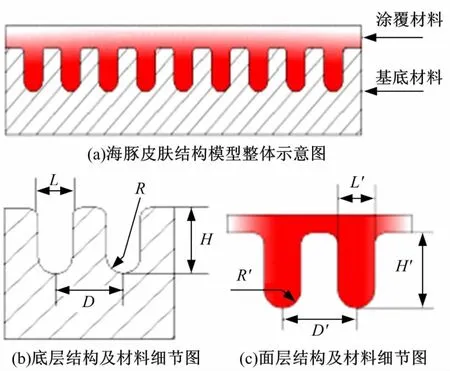
图1 仿海豚皮肤结构模型Fig.1 Biomimetic structure model of dolphin skin
1.2 仿生耦合功能表面的设计
根据上述生物信息的获取与处理,考虑到仿生耦合功能表面在工程上实现的难度,本文设计简化的形态/材料二元仿生耦合功能表面如图2所示。其基层采用硬度较大的金属材料,其横截面为正三角形的肋条状非光滑形态,三角形的底边长度为L,三角形非光滑间距为D,D=2L,如图2(a)所示。面层材料采用硬度和弹性模量较小的高分子材料——聚氨酯构成,与基层材料嵌合的非光滑结构如图2(b)所示。截面为正三角形的非光滑突起,底边长度为L′,两个三角形非光滑结构之间的间距为D′,D=2L′。
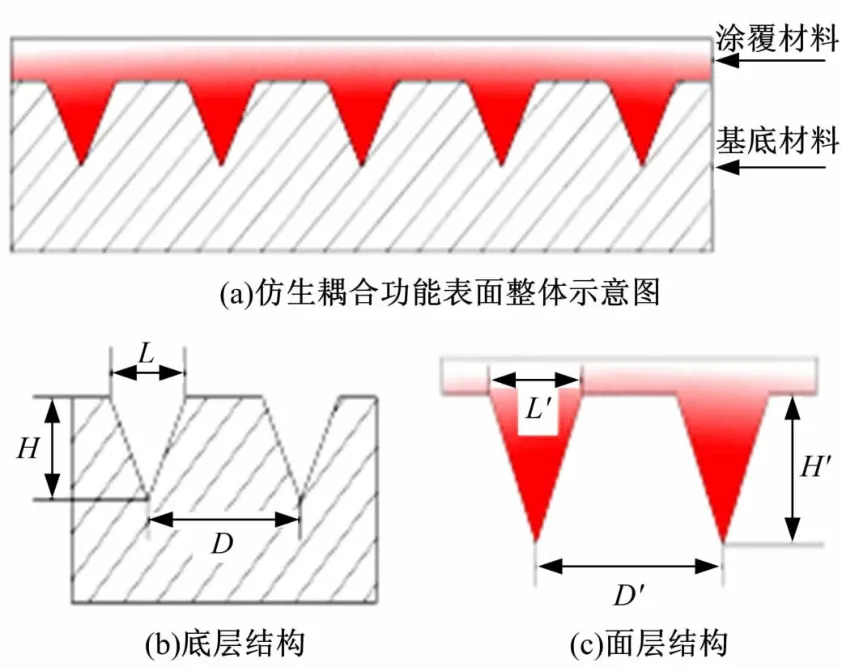
图2 二元仿生耦合功能表面结构Fig.2 Structure of dual factors bionic coupling functional surface caused by form and materia
2 形态/材料二元仿生耦合功能表面在离心式水泵叶轮上的实现
上述二元耦合仿生功能表面需要通过两个步骤在离心式水泵叶轮上实现。首先直接在水泵叶轮基底材料上加工仿生非光滑形态,水泵叶轮的基底材料为铸铁,具有很高的硬度;然后采用喷涂的方法,将具有一定弹性的高分子复合材料喷涂在水泵叶轮表面。本文选具有很好弹性的聚氨酯材料作为表面层,这样,形态/材料二元耦合仿生功能表面在叶轮上的实现能够得以保证。
2.1 形态仿生在离心式水泵叶轮上的实现
如图2(a)所示的非光滑形态,一般情况可通过表面雕刻或是机械加工的方法来实现,但是由于叶轮流道不规则且复杂,同时由于半封闭的叶轮流道使得加工刀具很难到达,采用上述两种方法难以加工成连续且质量较高的非光滑表面,更主要的是采用传统的机械加工方法,还会在叶轮表面形成表面应力集中现象,而采用一次性铸造成型法[14]可有效地解决上述问题。一次铸造成型法主要通过两种中间介质来实现,一种是硬橡胶,目的是为了加工非光滑形态,另外一种是髙温漆,用来高温定型。其铸造原理如图3所示。

图3 一次铸造成型法原理图Fig.3 Mechanism of one time casting molding method
为得到横截面为图3(b)所示的非光滑表面,首先在硬橡胶上加工出尺寸和形状相同的横截面为正三角形的胶条。并按照设计好的弧度、布置位置及走向粘贴在砂芯上,形成如图3(c)所示的非光滑凸起的表面,在非光滑肋条状凸起表面上涂抹高温漆,然后合模,铸造。这种方法称之为一次铸造成型法。具体步骤如下:①切割成型。在硬橡胶板上切割截面为三角形的肋条状胶条,本文设计的尺寸为L=0.9mm,D=1.8mm,为了满足设计上的需要,同时考虑到橡胶条受热膨胀变形以及还要在橡胶条的两测涂抹高温漆,因此,切割的橡胶条的尺寸比实际设计尺寸要小,L=0.7mm,D=1.8mm;②涂抹高温漆。在切割下来的橡胶条上,均匀地涂抹上高温漆;涂抹过程要迅速,以避免由于高温漆的凝固导致油漆滴的存在;③粘贴。按照铸件上要形成的三角形沟槽的位置、走向和弧度,粘贴到砂芯的正、反面上,如图4所示,形成非光滑表面;④风干及修剪。在通风的室温条件下风干,避免由于铸造过程中的高温使橡胶条受热变形而改变流道形状。修剪多余胶条;⑤合模;⑥铸造并脱模。

图4 砂芯正、反面Fig.4 Front and the back of the sand core which have non-smooth surface
在砂模上浇注金属液,高温漆在浇注时的1~2s内不溶化,金属液在几秒钟温度迅速下降,并冷却成型,能够保证三角形肋条形态成型。由于采用一次铸造成型技术,且加工的非光滑形态尺寸较小,形成的沟槽不会对水泵叶轮的刚度和使用寿命造成影响;此外,橡胶在高温下,完全气化并挥发;高温漆用量极少,其主要构成元素是硅,涂抹在橡胶条上的高温漆少部分在铸造成型过程中融入铁水中,大部分变成粉末状遗留在成型的叶轮铸件表面,不对铸件的性能造成影响。在金属液持续高热状态下,砂模、高温漆、橡胶等材料溶化、消失,形成所需铸件,实现横截面为三角形仿生非光滑表面在水泵叶轮上的示意图如图5所示。铸造成型后,对铸造的非光滑形态因素的尺寸利用游标卡尺进行了测量,结果为:L=0.92mm,两沟槽之间的距离D=1.81mm,其误差是完全可以接受的。
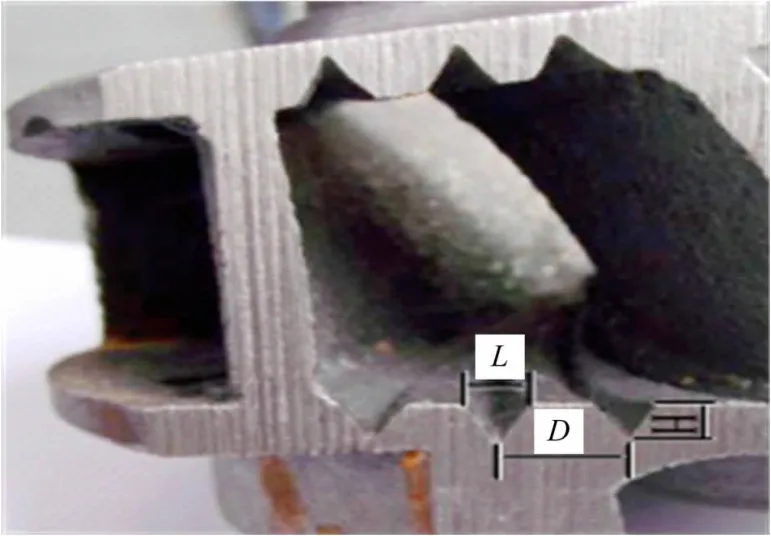
图5 水泵叶轮复杂流道内横截面为三角形的仿生非光滑表面Fig.5 Bionic non-smooth surface which cross-section is triangle shape cast on the complexity channel of pump impeller
2.2 柔性材料仿生在离心式水泵叶轮上的实现
本文面层材料采用硬度和弹性模量较小的高分子材料——聚氨酯。聚氨酯全称为聚氨基甲酸酯,是主链上含有重复氨基甲酸酯基团(NHCOO)的大分子化合物的统称。聚氨酯涂层柔软并有弹性,其强度好,可用于很薄的涂层,并有一定的耐磨性能[15]。本文采用的聚氨酯表面涂层是由聚氨酯预聚体(分子式C10H8N2O2·C6H14O3)以及催化剂(分子式C13H12N2CL2)按照100∶12的质量比混合而成,具体实现方式如下:①将上述比例的混合物放入温度为80℃的电烤箱中融化成液体,搅拌均匀;②放入FZX-1型真空干燥机中,在负一个大气压下抽真空备用。考虑到在水泵叶轮流道等复杂表面涂覆工艺的难度,本文采用旋转涂覆方式实现柔性材料在水泵叶轮表面上的涂覆:首先,把整个叶轮在之前混合好的液态聚氨酯中浸蘸,使得整个叶轮表面能够与液态聚氨酯充分接触;然后,迅速把浸蘸均匀的叶轮安装在自制的旋转涂覆装置的中轴上,利用电机带动中轴做正反各10转的反复旋转运动,利用离心力使液态聚氨酯均匀涂覆在叶轮流道复杂表面,自然凝固,然后在高温120℃硫化机内进行首次硫化15min,为了能够得到较好耐磨性的柔性材料涂层,需在温度为100℃的硫化机内进行二次硫化,二次硫化的时间为8h。
3 二元耦合功能表面增效减阻试验
3.1 试验仪器及方法
选择吉林市方田泵业有限公司生产的200QJ50-26型离心式水泵叶轮作为设计载体,采用一次铸造成型和旋转涂覆工艺,将设计的耦合仿生功能表面加工到叶轮表面。共加工具有这种形态/柔性材料的水泵叶轮18个,装配成二级泵9台,在这里简称仿生耦合水泵。在吉林方田泵业有限公司潜水泵试验台与普通水泵进行重复性对比试验,其流量和压力值分别由安装在试验台上的流量计和压力计测定,试验台如图6所示。该试验台具有很高的测试精度(0.5%),在试验的过程中严格按照国家标准执行。参考的国家标准有 GB/T12785-2002、GB/T2818-2002、GB/T2816-2002。考虑到在试验过程中使用不同的电机有可能会对水泵性能参数产生影响,从而影响到水泵的效率。其中5台仿生耦合水泵采用与普通水泵相同的电机,另外4台水泵采用与普通水泵不同的电机,与两台普通水泵进行效率对比试验。其中样件1,2为普通水泵,样件3,4,5,6,7为仿生耦合水泵,且与普通水泵采用相同电机,样件8,9,10,11是仿生耦合水泵,但是采用电机与普通水泵不同。
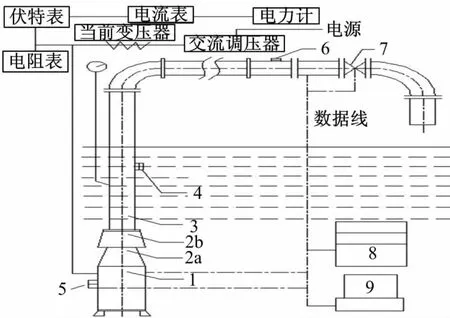
图6 试验台示意图Fig.6 Sketch of the diving pump test bed
3.2 试验数据处理方法
泵效率ηp可以用如下公式表示

式中:Q′为实测流量;H′扬和P′2分别表示总扬程和实测轴功率;ρ和g分别表示水的密度和重力加速度。为了使试验具有可比性,实测流量Q和H扬应该根据旋转速度nsp转化成转速为2850r/min时的标准流量和标准扬程。转化公式如下:

式中:n为实测转速;ηp为转化后的效率。
3.3 试验结果及分析
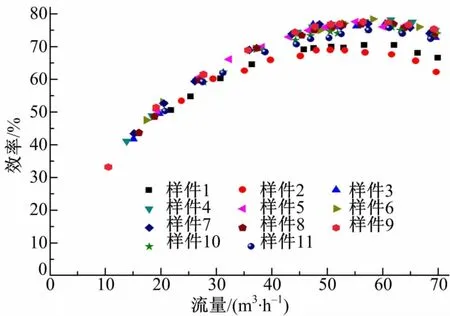
图7 仿生耦合水泵与普通水泵效率对比图Fig.7 Flow-efficiency comparison between bionic coupling pump and ordinary pump
仿生耦合水泵与普通水泵在整个流量段内效率-流量关系曲线如图7所示。200QJ50-26型离心式水泵的有效流量段为40~60m3/h,普通水泵的最大效率点处的效率为68%~70%,发生在流量为50~55m3/h时,此后效率下降很快,但是对于大多数的仿生耦合水泵而言,最大效率点发生在流量为50~60m3/h时,并且最大效率基本维持在75%左右,效率可提高5%及以上,此后相当长的一段时间内,效率下降缓慢,这使得仿生耦合水泵的效率-流量曲线变得丰满且平顺,这意味着在有效工作范围内,仿生耦合水泵可以连续地维持在较高工作效率范围内工作。在非有效流量段内(即流量为0~40m3/h),考虑仿生非光滑形态和表面聚氨酯材料两个因素耦合的仿生耦合水泵,其效率也得到提高,而只考虑仿生非光滑形态因素的仿生非光滑水泵,效率在这一阶段效率与普通水泵相比是降低的[16]。这说明,与只考虑非光滑形态单因素的仿生非光滑水泵相比,非光滑形态/聚氨酯材料二元仿生耦合水泵具有更全面的减阻增效功能。其增效机理如图8所示:①在流量较低时,即流量在0~40m3/h时,水泵的转速低,流量小,这部分减阻机理主要通过材料因素的弹性变形实现对流体的控制,如图8(a)所示,即二元耦合功能表面中的弹性材料通过弹性变形,吸收了部分能量,并通过材料的变形而存储了这部分能量,在适当低压的时候,又通过弹性变形释放这部分能量,并传给流体介质,从而减少了能量损失。②流量较大、压力较高时,由于面层材料1出现较大的变形,而基底材料与表面面层材料的弹性模量不同,面层材料与基底材料表面上的非光滑结构出现了一种动态的耦合过程,从而在整个耦合功能表面上呈现出一种动态非光滑状态,如图8(b)所示,根据流体的压力呈现出一种类似于海豚皮肤表面的一种动态自适应过程,从而有效地降低了能量的损失。因此,采用耦合动态仿生功能表面,在整个流量段内,水泵的效率均得到提高。
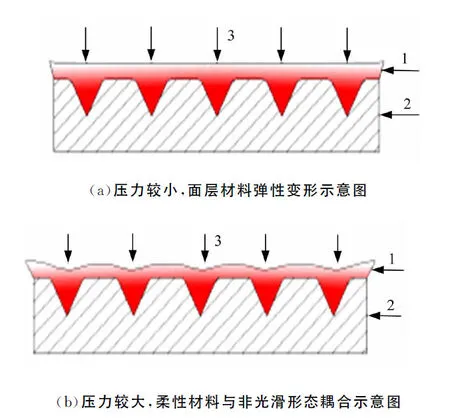
图8 仿生功能表面增效减阻机理示意图Fig.8 Mechanism of drag reduction and efficiency enhancement of bionic coupling functional surface(BCFS)
4 结束语
利用动态耦合功能表面面层材料的弹性变形,以及面层材料与基底材料非光滑形态的动态耦合,达到控制流体介质的目的,不需要提供额外的动力,就可以有效提高流体机械的效率,且增效节能效果显著,曲线重复性好,抗干扰性能强(与电机的选择无关),水泵增效性能稳定。上述研究为高效节能流体机械提供了一种绿色、持续、有效的技术,为仿生耦合功能表面在工程上的实现提供了有效的方法。
[1]Ren Lu-quan,Liang Yun-hong.Biological couplings:classificatin and characteris tic rules[J].Science in China Series E:Technological Sciences,2009,52(10):2791-2800.
[2]Ren Lu-quan,Liang Yun-hong.Biological couplings:function,characteristics and implementation mode[J].Science in China Series E:Technological Sciences,2010,53(2):379-387.
[3]Tian Li-mei,Ren Lu-quan,Liu Qing-ping,et al.The mechanism of drag reduction around bodies of revolution using bionic non-smooth surfaces[J].Journal of Bionic Engineering,2007,4(2):109-116.
[4]Zhang Cheng-chun,Wang Jing,Shang Yan-geng.Numerical simulation on drag reduction of revolution body through bionic riblet surface[J].Science in China Series E:Technological Sciences,2010,53(11):2954-2959.
[5]陈坤,刘庆平,廖庚华,等.利用雕鸮羽毛的气动特性降低小型轴流风机的气动特性[J].吉林大学学报:工学版,2012,42(1):79-84.Chen Kun,Liu Qing-ping,Liao Geng-hua,et al.Aerodynamic noise reduction of small axial fan using hush characteristics of eagle owl feather[J].Journal of Jilin University(Engineering and Technology Edition,2012,42(1):79-84.
[6]任露泉.地面机械脱附减阻仿生研究进展[J].中国科学E辑:技术科学,2008,38(9):1353-1364.Ren Lu-quan.Progress in the bioruc study on antiadhesion and resistance ruduction of terrain machines[J].Science in China Series E:Technological Science,2008,38(9):1353-1364.
[7]郭蕴纹,任露泉,刘先黎,等.仿生凹坑与纳米碳化硅/镍基复合涂层耦合表面的磨损性能[J].吉林大学学报:工学版,2012,42(1):74-78.Guo Yun-wen,Ren Lu-quan,Liu Xian-li,et al.Abrasion properties of bionic coupling surface of concave pits and nano-size SiC/Ni composite coatings[J].Journal of Jilin University(Engineering and Technology Edition),2012,42(1):74-78.
[8]Wu Li-yan,Han Zhi-wu,Qu Zhao-mei,et al.The Microstructures of Butt-erfly wing scales in northeast of China[J].Joumal of Bionic Engineering,2007,4(1):47-52.
[9]Fish F E.The myth and reality of Gray's paradox:implication of dolphin drag reduction for technology[J].Bioinsp Biomim,2006,1:R17-R25.
[10]Zhang Hui,Yoshutake Naoki,Hagiwara Yoshimichi.Changes in Drags Acting on an Angled Wavy Silian Rubber Plate as a Model of the Skin Folds of a Swimming Dolphin[M].Bio-mechanisms of Aminals in Swinoniong and Flying,Springer Japan,2008:91-102.
[11]Zhang Hui,Yoshutake N,Hagiucora Y.Attenuation of turbulent flow separation in wavy wall by compliant surface[J].Advancesin Turbulence XI,2007:597-599.
[12]Yamahata K,Hanaoka T,Hagiwara Y,et al.Turbulence modification in the flow over a silicon rubber wall as a model of dolphin skin[C]∥2nd Int Symposium on Seawater Drag Reduction,2005:535-544.
[13]Takashima K,Koyama S,Hagiwara Y.Direct numerical simulation on turbulent flow around a regularly deforming film[J].Advances in Turbulence XI,2007:662-664.
[14]田丽梅,卜兆国,陈庆海,等.肋条状仿生非光滑表面铸造成型法[J].农业工程学报,2011,27(8):189-194.Tian Li-mei,Bu Zhao-guo,Chen Qing-hai,et al.Casting method of rib-like bionic non-smooth surface[J].Transactions of the CSAE,2011,27(8):189-194.
[15]叶梅.聚氨酯弹性体复合材料的制备及结构性能研究[D].苏州:苏州大学材料工程学院,2006.Ye Mei.Synthesis and characterization of pdyurethone elastomers coniposite materials[D].Suzhou:College of Materials Engineering,Suzhou University,2006.
[16]任露泉,彭宗尧,陈庆海,等.离心式水泵仿生非光滑增效的试验研究[J].吉林大学学报:工学版,2007,37(3):575-581.Ren Lu-quan,Pen Zong-yao,Chen Qing-hai,et al.Experimental study on efficiency enhancement of centrifugal pump by bionic non-smoo-th technique[J].Journal of Jilin University(Engineering and Technology Edition),2007,37(3):575-581.
