边角交会法在滑坡监测中的应用
2013-08-13朱理想姚连璧孙海丽
朱理想,姚连璧,2,孙海丽
(1.同济大学 测量与国土信息工程系,上海200092;2.现代工程测量国家测绘局重点实验室,上海200092)
滑坡是山区和露天矿经常发生的地质灾害,每年都造成很大的人员和财物损失。要避免或减轻滑坡造成的损失,必须对滑坡进行监测、分析和预报。
在滑坡安全监测中,水平位移监测通常采用测角前方交会法,这在测距仪器精度不是很高的年代是比较适合的,但随着测距仪的普及和测距精度的迅速提高,再一味强调运用测角前方交会来监测水平位移,无疑增大了水平位移监测的日常观测工作量,对保证水平位移的监测精度及提高观测值的可靠性也没有好处[1]。
水平位移监测方法除了前方交会以外,还有测边交会、边角交会等,本文针对目前常用的几种监测方法进行理论上的精度分析,并根据某滑坡平面监测点的实测数据进行分析、验证,得出了一些有益的结论。
1 精度分析
1.1 前方交会
前方交会的原理如图1所示,用经纬仪在已知点A,B上测出角α和β,计算待定点P的坐标,其前方交会点P的点位中误差为

式中:m 为测角中误差,ρ=206 265,S为A,B间距离。
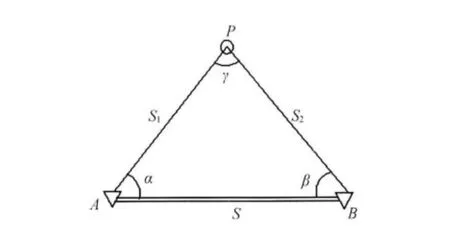
图1 前方交会
对式(1)进一步说明,当交会角γ>90°时,对称交会将使待定点的点位中误差最小,即观测角α=β时,交会最为有利;当γ=90°时,交会点精度与α,β无关;当交会角γ<90°时,对称交会将使待定点的点位中误差最大,即观测角α=β时,对称交会最为不利。
由此可知,利用前方交会监测平面点时,必须对平面监测点位置进行优化设计,尽量使它满足α=β,交会角γ在109°附近,否则,其平面监测点精度将迅速递减。
1.2 测边交会
如图1所示,观测S1,S2边,求交会点P坐标的方法,称之为测边交会。
设边长S1,S2的测距中误差为mS1,mS2,则测边交会的点位精度可表示为

目前,测距仪的测距中误差常采用两种形式表示,即

式中:a为固定误差,b为比例误差,mm;S为距离,km。
1.3 边角交会
如图1所示,用经纬仪在已知点A,B上测出角α和β,并观测S1,S2边,形成多余观测,以计算待测点P的坐标,称之为边角交会。
采用间接平差原理,如图2所示(假定j为已知点),列出误差方程式,式(5)为坐标方位角改正数方程,式(6)为测边误差方程
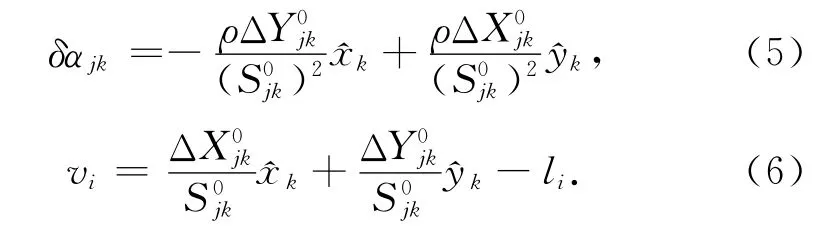
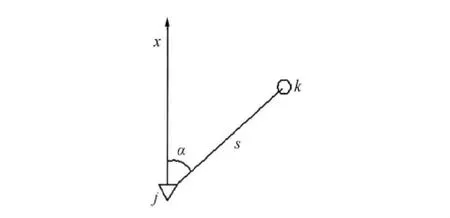
图2 方位角及边长求误差
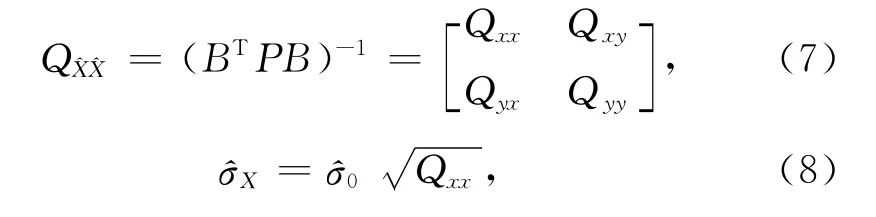
各点在X,Y,ψ方向上的误差公式为
2 实例分析
根据以上边角交会法的原理和精度分析,下面针对富春江电厂大坝左侧滑坡体的监测数据进行分析。
富春江电厂大坝是浙江省重要的水利设施。其左侧有一山体曾出现滑坡现象,危及大坝以及电厂的安全。电厂于1997年进行了加固处理,布设了监测系统,以坝区二等精密三角网的控制点J1,J2作为滑坡监测的基准点,并在滑坡体上建造8个观测墩作为变形监测点用于监测山体滑坡,自2000年开始进行多年的连续监测,变形监测的时间间隔一般为1~2个月。滑坡监测点分布及监测控制网布设见图3。
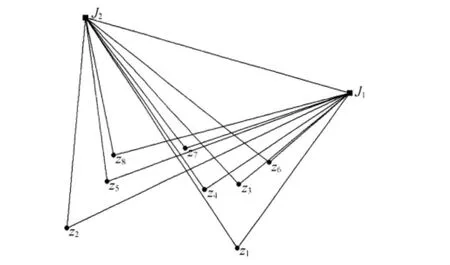
图3 滑坡监测点分布
针对该滑坡体的变形监测,采用TCA2003测量机器人在2个基准点对8个监测点进行全圆法的水平角、竖直角、斜距的自动观测[2]。根据该滑坡某期监测数据,比较水平位移监测点各种交会方法的测量精度,利用点位精度公式进行计算,水平位移监测点图形数据及不同交会方法下的点位精度列于表1。
从表1可以看出,在相同的图形条件下,边角交会较前方交会和测边交会的点位精度高,分析其原因,边角交会利用多余观测值增加了误差方程式,而前方交会和测边交会则没有用到。因此,在条件允许的情况下,应采用边角交会以提高监测点的测量精度。
本例不仅计算了各监测点的点位精度,而且计算了在边角交会条件下各监测点在位移滑行方向上的点位精度,这样更符合现实意义,见表2。
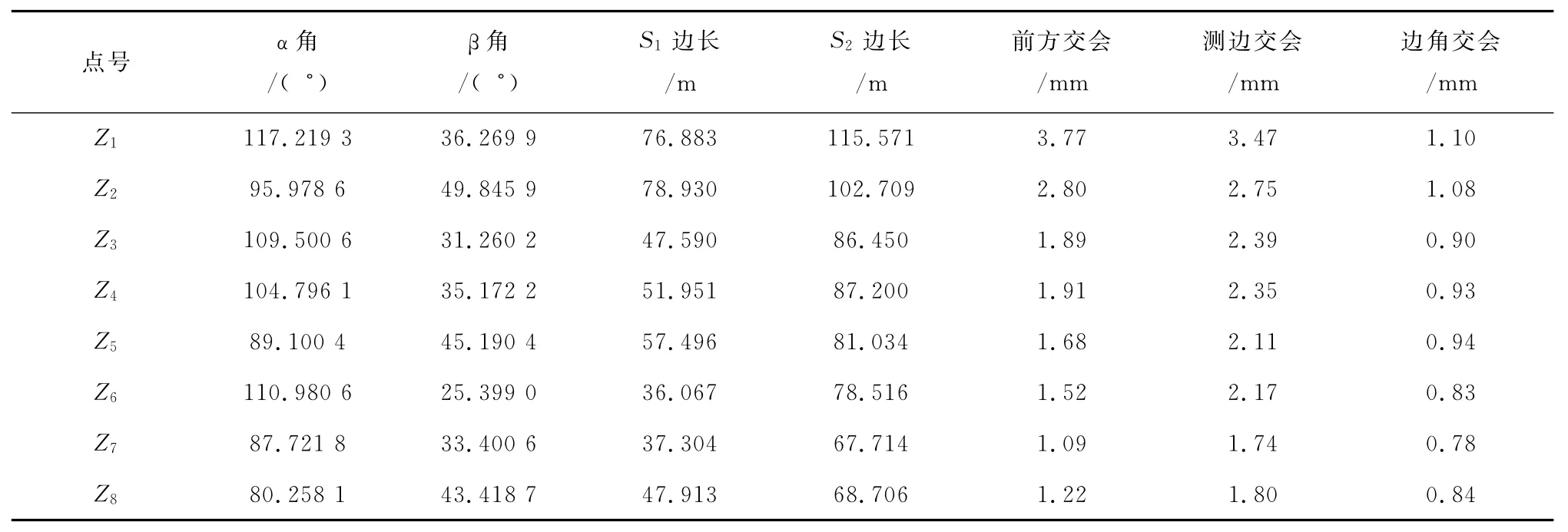
表1 水平位移监测图形数据及点位精度
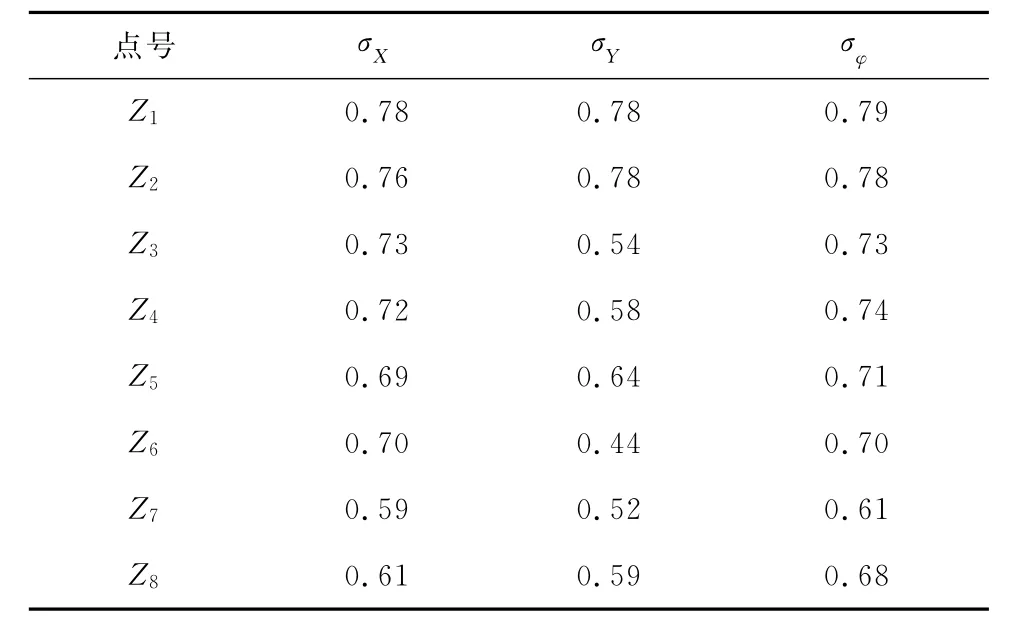
表2 监测点滑坡方向的点位精度 mm
3 结论与建议
1)通过实验可以看出,测角前方交会与测边交会相比,两者精度相当。
2)在相同仪器测量下,边角交会精度远好于前方交会和测边交会。
3)建议以后在水平位移监测点图形形状不佳及仪器条件许可的情况下,使用边角交会。
4)为了提高富春江电厂滑坡自动变形监测的精度,建议采用边角交会方法进行数据处理和精度分析。
[1]岳建平,许捍卫.交会法测定水平位移的精度分析[J].测绘工程,2000,9(2):64-67.
[2]孙海丽,孙昊,姚连璧.基于TCA2003测量机器人的滑坡变形监测系统开发与应用[J].大地测量与地球动力学,2012,32(1):152-155.
[3]岳建平,许捍卫.天荒坪上水库水平位移监测点监测精度分析[J].大坝观测与土工测试,1998,22(6):1-3.
[4]王志明.几种水平位移监测方法的分析和比较[J].上海建设科技,2008(5):75-77.
[5]葛永慧,张书毕.测量平差[M].徐州:中国矿业大学出版社,2005.
[6]徐佳.基于TCA2003全站仪的变形监测系统研究[D].辽宁:辽宁工程技术大学,2005.
[7]易庆林,卢书强.测量机器人在滑坡应急监测中的应用[J].人民长江,2009,40(20):62-63.
[8]Y.Gao.Construction and Application of a Real-Time Monitoring System for Landslides[J].Environmental Science and Engineering,2009.
