基于LabVIEW的制动控制单元自动测试系统的开发
2013-08-13高晓燕丁国君
高晓燕,丁国君
(1.河北交通职业技术学院,河北 石家庄 050035;2.北京交通大学 电气工程学院,北京 100044)
我国已逐步掌握动车组制动系统作为列车运行安全的关键核心技术,但是由于国产化时间不长,制动系统的关键控制设备制动控制单元在实际运行中出现故障的次数较多,影响了列车的安全稳定运行[1]。目前对制动控制单元的检测集中于整体检测,一旦设备存在故障,无法定位故障电路位置而增加维修成本和影响列车正常运行。为了能够迅速对制动控制单元进行状态检测和故障定位,开发快速智能化的制动控制单元电路板自动检测系统是十分必要和紧迫的。
借鉴目前集成测试和虚拟仪器的先进设计思想,通过编写应用软件,部分取代传统仪器来实现现场数据的采集与分析已成为可能[2]。目前,国内外许多公司推出了功能强大的计算机测试系统,品种较多,但价格相对昂贵,对特定研究对象而言,检测与诊断的针对性不强[3]。因此研制开发了高集成度、智能化的适合于制动控制单元的单板自动化检测系统,便于定位故障回路,同时适用于大批量生产产品的出厂检测和维护维修。
根据动车组制动控制单元的工作性能和测试要求,本文以电流传感器技术和虚拟仪器为开发平台,从系统框架、硬件和软件设计三部分对该系统进行详细的阐述与分析,并进行了现场实际测试,验证了系统的可行性和实用性。
1 系统整体结构及原理
制动控制单元是动车组制动系统的核心控制设备,在制动系统中担负着制动力计算、电空制动演算控制、防滑控制、空压机控制、通信、监控及故障处理等任务。制动控制单元主要由CPU主板、接口板、防滑板、电源板等电路板组成,各电路板间的连接器采用扁平电缆线连接。
自动化测试系统实现动车组制动控制单元单板导通测试、功能测试和特性测试等功能。测试时,从被试板处输入测试信号,通过信号调理电路,PXI数据采集卡对信号进行采样处理,然后由嵌入式计算机进行自动化测试分析,并实时显示、存储和打印测试结果。通过自动测试,可定位到故障回路;通过手动试验,可对单板进行手动单项测试,进一步确定故障位置及发生故障的元器件。测试系统的整体结构如图1所示。
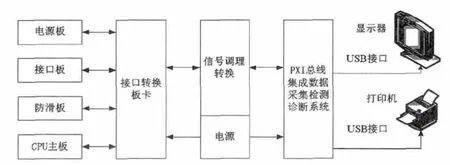
图1 测试系统框图
2 系统硬件设计
2.1 主控制器及板卡选型
嵌入式计算机是测试系统的核心,自动化测试系统是以PXI嵌入式控制器为核心,并结合PXI测试板卡,给被测板提供激励信号,并将被测板的响应输出信号采集并传回计算机进行处理。系统的硬件结构图如图2所示。
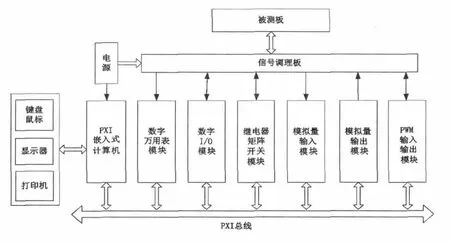
图2 系统硬件结构图
根据测试的需求,选用PXI-8108高性能嵌入式控制器作为系统控制器,采用PXI-4070数字万用表板卡、PXI-6528数字I/O板卡、PXI-6602 PWM产生及采集板卡、PXI-6723和PXI-6220多功能数据采集板卡等对输入输出信号进行采集处理。信号调理板在对PXI系统与被测电路板之间进行接口转换的同时还有完成对PXI系统输入输出信号调理的任务,以满足被测电路板的实际工作需要和与采集板卡信号类型匹配。
2.2 电流传感器
针对CPU主板在进行EP阀功能测试时,需要对制动控制单元输出的0~700 mA电流进行测量,但是PXI模拟输入采集板卡是量程 0~5 V电压输入,因此需要采用电流传感器进行电流电压转换。但是传统的电流传感器的灵敏度比较低,输出信号有偏置电压和噪声,对于处理电路要求高,系统成本高[4]。测试系统采用北京森社电子的电流变送器 (宇波模块)CHS-1AD/V0。宇波模块采用霍尔传感器的工作原理(如图3所示),是一种先进的能隔离主回路(原边)与电子控制回路 (副边)的电流变送器。其基本工作原理是磁平衡式的,即主电流回路所产生的磁场通过一个次级线圈的电流所产生的磁场进行补偿,使霍尔元件始终处于检测零磁通的工作状态。具有体积小、功耗低、噪声小、隔离效果好等优点[5]。
3 系统软件设计
自动化测试系统的软件设计遵循模块化设计原则,采用 LabVIEW软件进行编程[6],实现可视化实时显示测试数据,给出测试结果,并能定位故障回路。测试软件主要由电路板测试模块、测试信息维护模块和人机交互模块组成,设计了包括底层设备驱动、测试过程管理控制、程序基本测试驱动以及数据管理等子软件,并可自动生成报表,便于查询与打印。软件功能模块框图如图4所示。
进入系统后,首先要对PXI采集板卡进行配置与自检;然后根据测试需求进行测试模式选择。如果是新类型的电路板,则需要在管理主数据功能中进行登记,并对测试项进行编辑,以完成本类型测试板的资源配置;然后执行测试流程。如果测试结果显示故障,则进行故障回路定位,输出测试报表,释放硬件资源占用,系统软件的操作流程如图5所示。
用户可以根据测试需求选择自动检测和手动检测两种测试方案。在试验过程中,测试软件会自动记录故障类型。系统在试验完成后弹出提示框,并标记电路故障,用户可以选择进行下一项检测,或者结束测试,进行维修。
4 实际测试分析
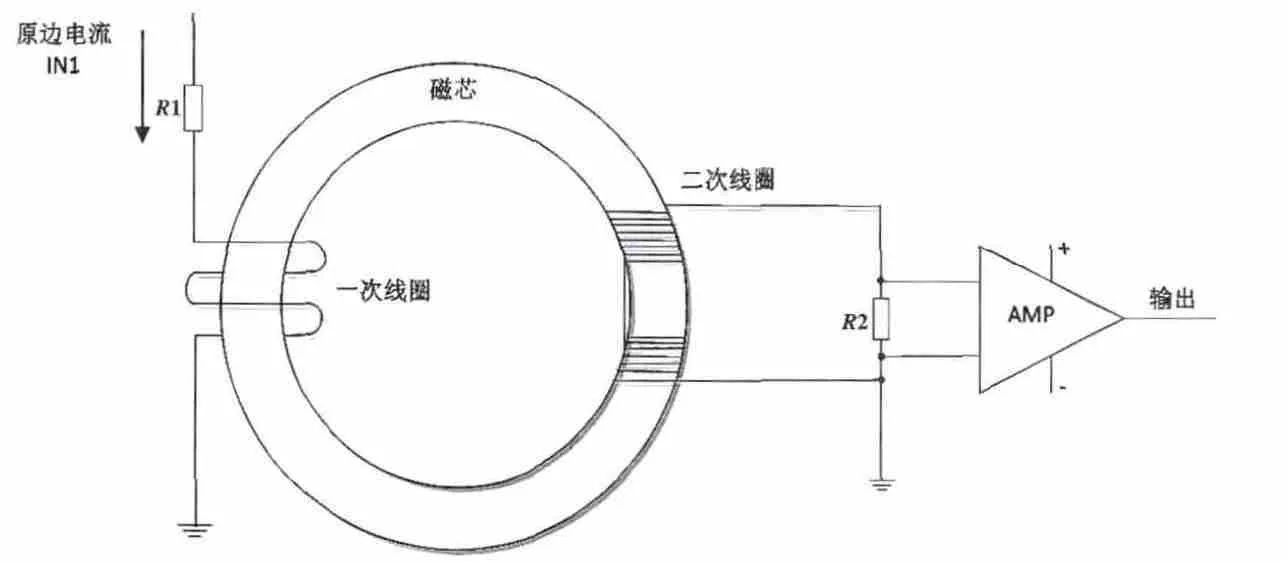
图3 宇波模块工作原理图

图4 软件功能模块框图
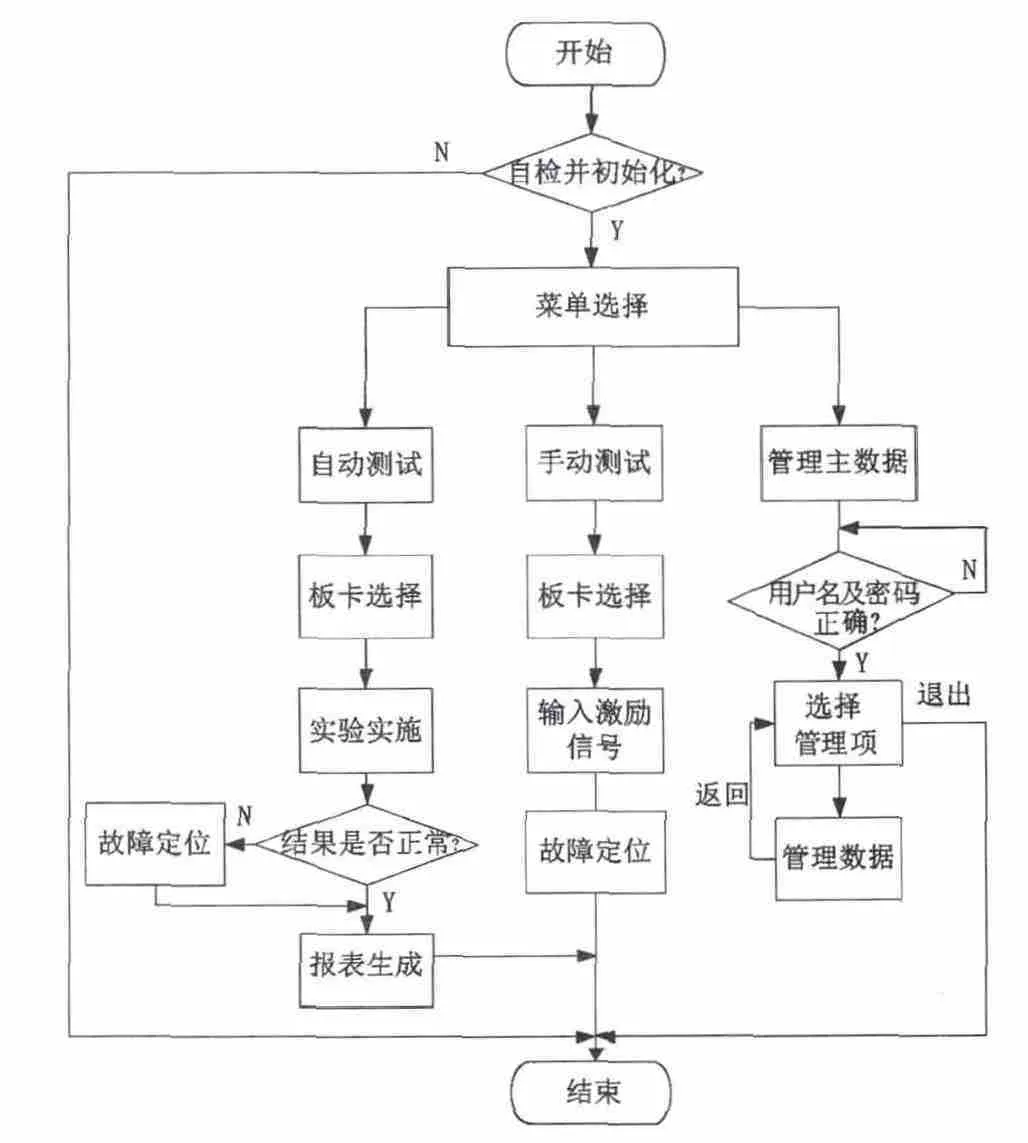
图5 电路板测试流程图
以拖车CPU电路板在空车情况下EP电流测试为例,对工作正常和发生故障的CPU板进行分析对比。根据制动控制单元设计要求,EP电流输出允许误差为±15mA。图6(a)所示为无故障CPU板在快速制动下制动控制单元输出EP电流;图6(b)为发生故障CPU板在快速制动下输出EP电流;然后由手动单路测试确定是CPU板的AS1和AS2压力输入采集回路发生故障,导致输出EP电流偏低。试验结果证明了宇波模块和测试系统的可靠性和准确性。
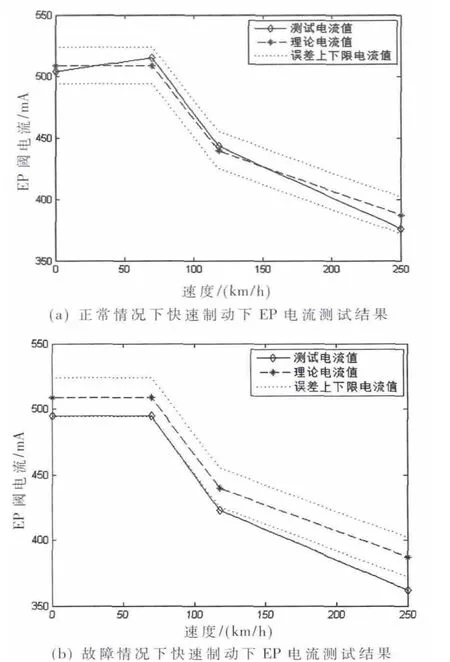
图6 EP电流测试结果对比
根据集成测试和虚拟仪器的先进设计思想,开发了电路板自动化测试系统。整个测试系统集成度高、自动化程度高、扩展性强,充分体现了虚拟仪器的优势,功能扩展灵活、系统维护方便,具有良好的应用前景。
[1]陈战胜.CRH2型动车组BCU故障原因及处理和应急措施[J].河南科技,2008(9):315-318.
[2]张琪,侯加林,闫银发,等.基于虚拟仪器的电路板故障检测与诊断系统的研究[J].电子测量与仪器学报,2011,25(2):135-140.
[3]樊新海,战军,安钢,等.装甲车辆底盘关键部件综合检测系统研制[J].兵工学报,2009,30(7):849-852.
[4]郭军,刘和平,刘平.基于大电流检测的霍尔传感器应用[J].传感器与微系统,2011,30(3):142-145.
[5]郭清,王元昔.霍尔传感器在直流电机转速测量中的应用研究[J].传感器与微系统,2011,30(7):54-56.
[6]李铮,苗曙光.基于 WSNs和 LabVIEW水温控制系统的设计[J].传感器与微系统,2011,30(3):118-120,124.
