基于回波自调距离门的FPGA控制器的设计*
2013-08-13谭菊琴陈荷娟
谭菊琴,陈荷娟
(南京理工大学 机械工程学院,江苏 南京 210094)
主动超声探测技术是现代水中目标探测常用的技术之一,它根据目标反射的回波信息实现目标定位。为了提高水中近程动目标探测性能,常采用多个主动超声探测器独立地对目标进行探测。但是,当探测器间的距离在主动超声探测的有效探测范围内时,就会出现探测器相互干扰的问题,从而影响探测系统对目标的判断与测距。因此,要求水中超声探测系统应具有区分相邻探测器和目标的功能,以及防止探测器间信号串扰的能力。
现阶段解决探测器相互干扰的方法有:多普勒频偏法、编码法和基于回波自调距离门控制法[1-2]。但是,多普勒频偏法只能确定回波有无,不能确认收到的回波是自身发射信号经目标反射的回波还是其他信号,易引起探测系统的误判断。编码法虽然可以解决上述问题,但是它的信号脉宽须大于脉冲展宽,会增大探测盲区。参考文献[2]提出了基于回波自调距离门的选通时机控制法,解决了多普勒频偏法不能解决的问题。因此,本文利用硬件描述语言和有限状态机的方法,设计了基于回波自调距离门的FPGA控制器。
1 基于回波自调距离门控制法
控制方法如图1所示,图中 s(t)为发射信号;fd为控制器的输入信号,它是目标回波经放大、混频、滤波后的输出信号;C(t)为距离门门控信号,高电平有效;Tp为发射信号的脉宽;Tmax是最大脉冲重复周期。为降低近距离体积混响和抑制干扰,只允许距离门内接收信号。
方法一,如图1(a)所示,控制电路在探测器发射超声波时启动计时器。延时 Th(Tp<Th)后,令 C(t)=1,打开第1 个距离门,允许接收 fd。 若 Th≤t≤Tmax,fd=0,说明无物体,则在 t=Tmax(即 B1=Bmax)时,令 C(t)=0,停止接收fd,做出“无目标”决策。下一个探测周期,C(t)继续按上述控制规律工作。
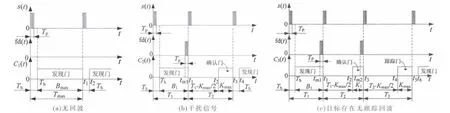
图1 基于回波自调距离门控制法
方法二,如图1(b)所示。 若在 t=tm1<Tmax时,有 fd≠0,说明有物体出现,则在 t=tm1+Tp时,使 C(t)=0。同时,发射第2个超声波对目标进行探测。接着,在上次fd出现前 Kmax/2时,再次使 C(t)=1,开启第 2个距离门。当K1=Kmax时,fd=0,则认为第1次收到的是干扰信号,做出“无目标”决策。下一探测周期,C(t)按方法一工作。
方法三,如图1(c)所示。 若 K1<Kmax时,有 fd≠0,说明第一个距离门内出现的是目标回波,则在t=tm2+Tp时,令C(t)=0,做出“有目标”决策。若要继续追踪目标,只需在再次发射超声波后的Ti-1-Kmax/2(Ti-1为第i-1次的脉冲重复周期,i=2,…,N)时刻,使 C(t)=1,打开第 3个距离门,跟踪目标。若C(t)=1时,fd=0,说明跟踪目标失败,做出“无目标”决策,控制 C(t)在下一个探测周期按方法一工作;否则,继续按跟踪目标的方法控制C(t)。
综上所述,根据各距离门的作用,将第1个距离门称作“发现门”,第 2个距离门称作“确认门”,第 3个距离门称作“跟踪门”。图1中,Bmax=Tmax-Th,是发现门最大门宽;Kmax为确认门和跟踪门的最大门宽。其中,发现门门控信号CD(t)为:

确认门和跟踪门门控信号CT(t)表达式为:

式中,t是距离门的选通控制时间点(计时零点为每次发射超声波的起始时刻)。
因此,图1(a)中 C1(t)、Ti分别为:

图1(b)中 C2(t)、Ti分别为:

图1(c)中 C3(t)、Ti-1和第 i次无回波出现时对应的Ti分别为:

图2 系统结构框图

2 基于回波自调距离门控制器的FPGA实现
2.1 系统总体结构
系统总体结构如图2所示,它由接收控制电路、脉冲重复周期计时器TI、判决器、时序控制电路、寄存器模块和距离门控电路构成。FPGA主要实现以下功能:对接收到的回波进行判断,并根据判断结果做出控制决策;对时钟信号进行计数,产生系统所需的各种控制信号。系统初始化时,将Th、Bmax和Kmax存放至寄存器模块,而探测器与目标的实际距离所对应的延迟Ti由时序控制电路放置到寄存器模块。
2.2 核心模块设计
设计采用自顶向下的设计方法[3],将系统功能划分为接收控制电路、判决器、时序控制电路和距离门控电路4个模块。
2.2.1 接收控制电路设计
接收控制电路的作用是在Tp时间内检测fd中包含的脉冲数n(2≤n≤6)。工作原理为:当fd的第一个脉冲上升沿到达时,启动脉宽定时器和计数器;脉宽定时器以Tp值为初值减计数,当减到0时,输出cout(低电平期间允许计数),触发计数器停止计数,并输出计数值n。
2.2.2 判决控制方法
由控制方法知,判决器的输出pj可由如下算法描述:

2.2.3 时序控制电路设计
时序控制电路是整个系统的核心,主要用于控制各模块工作时序。采用独热编码可减少实现状态机的组合逻辑数目,提高系统速度[4]。因此,本文采用独热编码设计了时序控制系统状态机。图3是按图1设计的状态转移图,它有3种状态,分别为初始状态S0、CD(t)工作状态S1和CT(t)工作状态S2。当RST=0或判决器输出pj=0时,控制系统的状态均会回到S0;当 RST=1时,控制系统先由 S0到 S1转换;在 S1时,若有 pj=1,立即由S1到S2转换;在 S2时,若有pj=1,则一直执行S2。
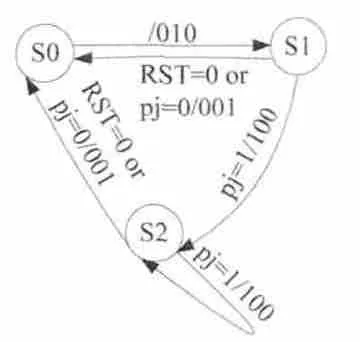
图3 状态转移图
2.2.4 距离门控电路
图4是距离门控电路原理图,它由4个计时器(发现门延时开门计时器TH及其门宽计时器BK,确认、跟踪门延时开门计时器TIK及其门宽计时器TK)和2个门控电路(发现门及确认、跟踪门门控电路)构成。计时电路主要对距离延迟和门宽延迟进行计数;门控电路主要产生发现门和确认、跟踪门门控脉冲D_gate及T_gate。C1是启动TH和TIK的触发信号,C2是关闭BK和TIK的控制信号,它们由时序控制电路控制。
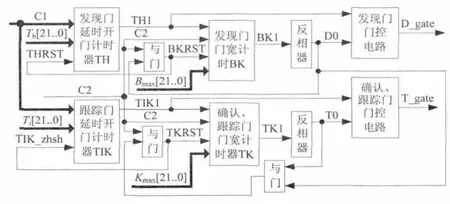
图4 距离门控电路原理图
(1)当C1=010时,启动TH递加计数,当达到 Th时,输出TH1,触发 BK递加计数,产生D_gate。若C2=1时,BK停止计数,则输出BK1,经反相器使发现门门控电路复位,完成发现门开和关。同时令BK1经反相器和C2相“与”后分别输入到THRST端、BKRST端和TIK_zhsh端,使 TH、BK复位,Ti被置入 TIK。

图5 时序仿真
(2)当 C1=100时,启动 TIK,当达到 Ti-1-Kmax/2时,输出TIK1,触发 TK递加计数,产生 T_gate。当 C2=1时,触发TK停止计数,输出TK1,经反相器使确认、跟踪门门控电路复位,完成一次确认、跟踪门的开和关。TK1经反相器与 C2相“与”后,再与 TIK_zhsh端、TKRST端相“与”,将 Ti放入 TIK、TK复位。
3 仿真验证
根据水下主动超声探测近距作用要求,选取Th=2.6 ms、Bmax=28.4 ms、Kmax=3 ms。 设定 t0 为同步脉冲,TP为脉宽计时器的使能端。利用ModelSim进行时序仿真,仿真结果如图5所示。
图5(a)是方法一仿真波形,表示的是 2.6 ms≤B1≤28.4 ms、n=0时对应的D_gate和T_gate波形。从图中A区可知,在D_gate、T_gate为 0时,虽有包含 3个脉冲的fd输入,但 n=0,说明在距离门关闭时,即使有 fd输入,也不会引起控制器误动作。
图5(b)是方法二仿真波形。反映了 B1=23 ms<Bmax、pj=1和 Kmax=3 ms、pj=0时对应的 D_gate和T_gate波形。
图5(c)是方法三仿真波形,表示目标存在但追踪目标失败所对应的D_gate和T_gate波形。图中连续两次有pj=1,说明目标存在,但是在追踪目标的过程中,pj=0,说明追踪目标失败。
仿真结果表明,在近距主动探测中,能在设定的距离延迟时间内完成发现、确认目标,迅速做出决策,自动调整距离门的选通时机,系统工作频率可达到194.4 MHz。
本文设计了基于回波自调距离门的FPGA控制器,它可利用接收到的回波信息自动调整距离门的选通时机。仿真表明,该控制器结构简单,实现了快速发现、确认目标回波信号的能力,提高了系统抗干扰的能力,其工作频率可以达到194.4 MHz。该设计为水下目标探测器的定位、跟踪功能提供了技术保障,具有很强的工程实用性。
[1]石建.浅海水声信号处理与电路设计[D].南京:南京理工大学,2001.
[2]谭菊琴,赵国库,陈荷娟.水声引信双门控制自调周期抗邻弹干扰方法[J].探测与控制学报,2010,32(1):49-53.
[3]周润景,苏良碧.基于Quartus II的数字系统Verilog HDL设计实例详解[M].北京:电子工业出版社,2010.
[4]李云,冯永浩,孟涛.基于VHDL有限状态机控制器的设计方法[J].微计算机信息,2010,26(5-1):74-75.
