基于CAN总线的分布式船舶火灾自动监控系统
2013-08-10殷文贵
殷文贵
(1. 上海交通大学电气学院,上海200139;2. 中国人民解放军4805厂,上海200136)
0 引言
船舶火灾作为一种常见隐患,一旦发生,势必造成系统功能故障,若不及时发现和控制,事故进一步扩大,对设备和人员,都会带来极大的损失。火灾的监控和预防,对保证船舶设备和船员的安全有着重大意义。
CAN总线是一种串行通讯协议,能有效地支持具有很高安全等级的分布实时控制。本文针对船舶常见的火灾事故隐患,提出一种基于 CAN总线的分布式船舶火灾自动监控系统。系统可以远程监控火情,可以在火灾出现时现场发出声光报警及切断相关设备的电源、启动排烟装置、打开喷淋装置等相关联动操作。
1 系统结构
船舶火灾自动监控系统由火灾探测传感器、监控系统控制器、现场监控单元、联动单元、远程监控单元等组成。
系统地使用基于 CAN 总线的通信网络,每个火灾现场检测单元包含一个 CAN节点,发生火情时,监控系统控制器通过现场的探测器、输入模块或者手动报警按钮得知火情,并在第一时间控制报警装置发出声光报警,控制现场联动装置。同时,将火灾信息通过 CAN总线发送到监控中心及远程联动单元。一方面,可以通知工作人员发生火情,需采取处理措施;另一方面,消防联动控制器控制消防电气设备启动灭火设施。
一般监测报警系统都存在系统组成比较复杂、连接电缆较多、末端报警响应慢等缺点[1]。使用 CAN总线的分布式智能化火灾监测系统,则避免这些不足。该系统响应及时、易于扩展功能和容量。该报警系统的组成如图1所示。
2 火灾探测单元
船舶内环境空间小、设施复杂。绝大部分火灾发生时都伴随一定的发热及温度的升高,可以通过不同的传感器,同时采集烟雾、温度数据等火灾数据。
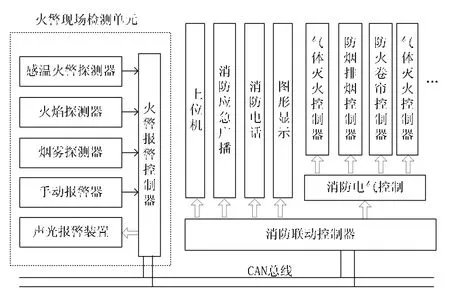
图1 分布式智能火灾自动报警系统示意图
在预期有隐燃,将产生大量的烟,很少有火焰的地方,应设有感烟探测器;在预期火灾发展快,有强烈火焰的地方,应选择火焰探测器;在火灾发展迅速,可产生大量热,烟和火焰辐射设施或场所,可选择感温探测器,感烟探测器,火焰探测器或其组合,以达到最佳的探测效果。
2.1 感温型探测器的使用
感温型探测器是利用热敏元件来探测火情的。根据其感热效果和结构型式可分为定温式,差温式及差定温式三种。
定温探测器用于检测温度是否超过了某个设定值,差温式探测器用于检测温度上升速率是否超过某个规定值,而差定温式探测器则结合了定温和差温两种作用原理并将两种探测器结构组合在一起。
感温探测器常用的感应传感器有双金属片、易熔金属、热电偶热敏半导体热敏电阻等原件,其中最常用的是热敏电阻。热敏电阻分阻值随温度升高而降低的负温度系数(NTC,Negative Temperature Coefficient)热敏电阻和阻值随温度升高而升高的正温度系数(PTC, Positive Temperature Coefficient )热敏电阻,两种传感器检测电路路类似,以 PTC热敏电阻为例,其阻-温曲线如图2所示,在常温下,它的电阻很小(通常只有几十欧姆),当温度上升到临界温度Tc时,其阻值迅速上升(甚至达1 MΩ以上),我们使用图3 所示的电路即可检测出这种变化。
在检测电路中,Rp为热敏电阻,R2=R3,室温下,RT﹤R0,此时光控二级管处于导通状态,微控制器检测到低电平。当发生火情时,高温使得 RT阻值迅速上升,从而远大于 R0,因此光控二极管被关断,此时微控制器检测到高电平[2],从而检测到火灾的发生。
感温探测器工作比较稳定,不易受非火灾性烟尘雾气等干扰,误报率低,可靠性高。
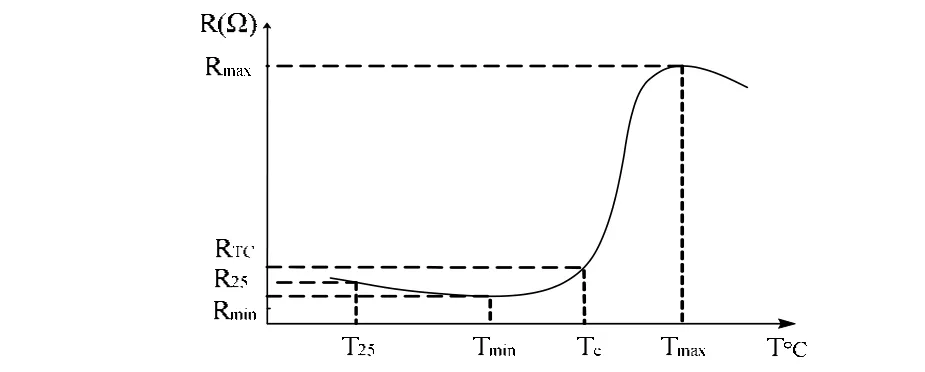
图2 PTC热敏电阻的阻-温曲线
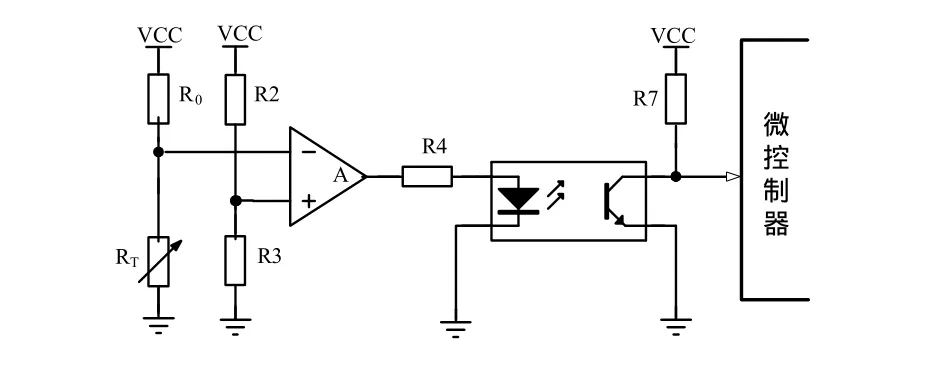
图3 热感应火灾检测电路
2.2 火焰探测器
火焰探测器有红外火焰探测器和紫外火焰探测器两种,其检测谱带如图4所示。它由于响应速度快,探测范围广而获得广泛应用。紫外光波长较短,比较适宜活泼金属及金属氧化物火灾的探测。而红外火焰探测器,由于其探测波长较长,较适合含碳类液体火灾的探测。
火焰探测器使用模块化的检测单元,模块根据火情输出0或者1,非常方便微控制器识别和处理。
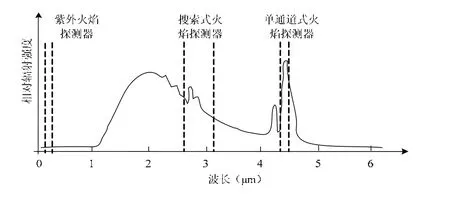
图4 火焰探测器工作谱带
2.3 感烟式探测器
烟雾传感器就是通过监测烟雾的浓度来实现火灾防范的,常见的烟雾探测器有光电式和离子式,光电式的监测原理如图5所示。探测光源发出的光在无烟雾和有烟雾的情况下分别被两个光敏元件接收,光敏元件将光信号转换成电信号后对比判断即可探测到有无烟雾。
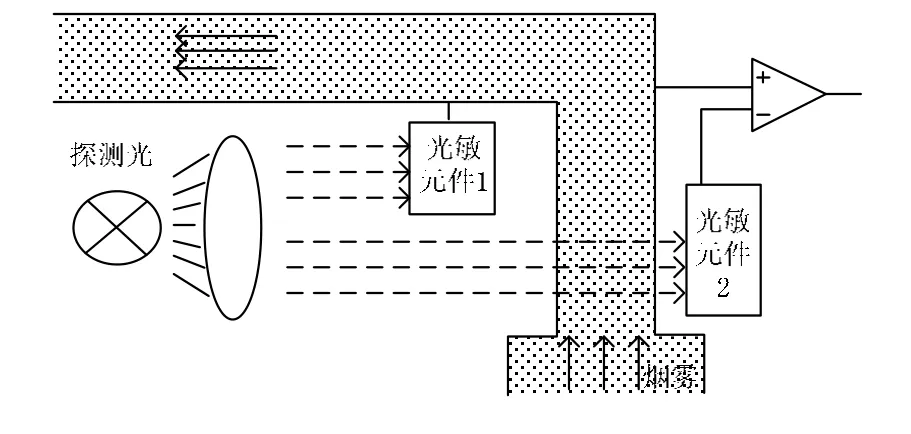
图5 光电式烟雾探测器原理
离子型探测器的工作原理是:采用离子室来探测烟雾物理量的一种器件,当环境中无烟雾时即探测器处于值守工作状态,离子室工作在平衡的离子流的状态下,因此其基准输出电平保持相对稳定,而当有烟雾充斥环境时,离子室中的离子流与烟雾的浓度成正比,所以其基准输出电平的电位也发生了相应的变化,那么离子室就将环境中烟雾浓度的变化转化成输出电平的变化[3],从而检测到火警的发生。
3 现场监控单元
3.1 现场监控单元硬件
分布式火灾报警系统的一个典型特征是现场检测单元中有微处理器,同时具有一定的智能,能够自动报警,这是当今火灾自动报警系统的一种发展趋势[4]。
现场监控单元如图6所示,控制器使用意法半导体公司的STM32105互联型Cortex-M3 处理器,CPU时钟达到72 MHz,它拥有2个CAN接口, 2个I2C,5个UART,3个SPI接口,其丰富的通信接口,使之非常适合用于互联设备的控制器。
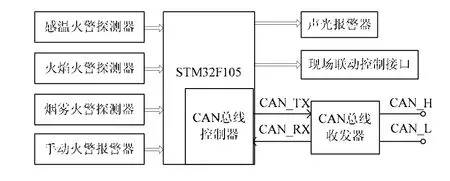
图6 现场监控单元
CAN总线收发器采用SN65HVD230,它是德州仪器公司生产的3.3 V CAN收发器,该收发器具有差分收发能力,最高速率可达1 Mb/s。适用于较高通讯速率、良好抗干扰能力和高可靠性CAN总线的串行通信。
当发生火灾时,微控制器接受到来自感温探测器、火焰探测器、烟雾探测器或者现场人员的手动报警信息,经过判断后,控制报警装置发出报警信号,同时通过控制现场联动控制接口,执行排烟、喷淋、化学灭火或断电等联动动作,及时对火灾做出第一响应,将灾害降低到最小。
微控制器在处理火灾现场的同时,还将火灾情况,如温度,火灾类型,火灾地点,时间,联动控制信号等数据,通过 CAN总线及时发送到监控中心,以通知值班人员采取相应的应急措施。
3.2 通信网络
火灾监控系统是基于 CAN总线构建的,通信网络也是依照开放系统互连规范按层次结构设计的。考虑到作为工业测控底层网络,其信息传输量相对较少,信息传输的实时性要求较高,网络连接方式相对较简单,因此,CAN协议定义了ISO/OSI参考模型的物理层及数据链路层[5]。
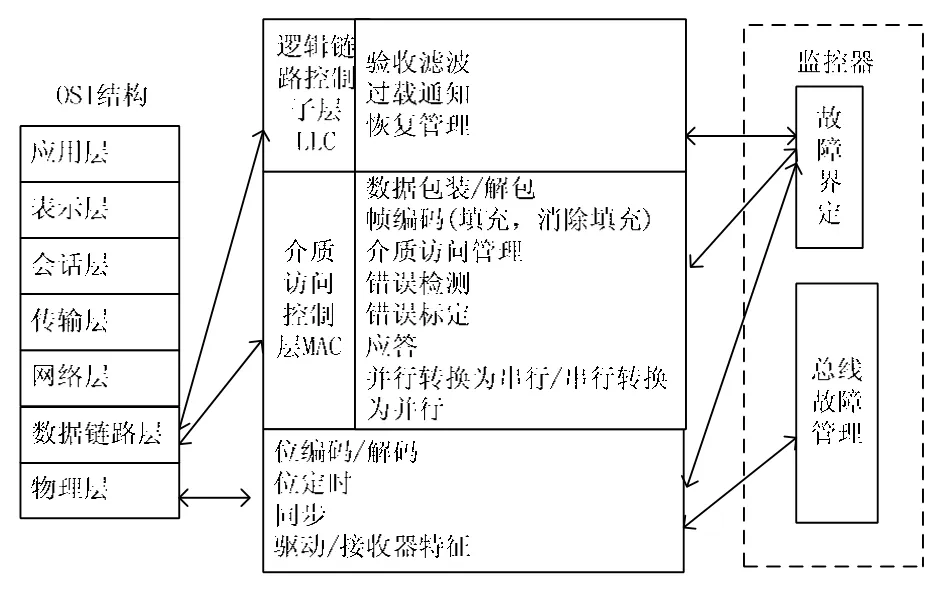
图7 CAN总线的OSI结构图
物理层定义了信号是如何实现传输的,涉及到位定时、位编码/解码、同步的解释。数据链层包含介质访问控制子层 MAC(Medium Access Control)和逻辑链路控制子层LLC(Logical Link Control)。其中,MAC 子层是 CAN协议的核心,负责报文分帧、仲裁、应答、错误检测和标定,把接收到的报文提供给 LLC 子层,并接受来自LLC 子层的报文;LLC 子层涉及报文验收滤波、过载通知和恢复管理。
CAN收发器和CAN控制器完成了物理层和数据链路层的功能,而应用层的功能是由 CAN总线的实际应用中由用户决定的。在本系统中,CAN总线上传输的火灾温度、火灾类型、火灾地点、时间、报警控制、联动操作控制等数据构成了OSI 7层结构中的应用层。
4 软件设计
各个 CAN节点软件功能包含现场报警信息的采集判断,现场联动控制,以及 CAN总线协议OSI 7层结构中应用层的实现。
STM32105的CAN总线控制器含有2个3 级深度FIFO,CAN报文的接收使用FIFO来处理,即使接收到的数据太多,CPU还未来得及处理,也不会造成CAN报文的丢失。
CAN节点使用ID列表过滤方式来实现数据过滤,列表中设置一个共同的广播地址和一个CAN节点地址,每个CAN节点只处理广播数据以和与自己地址匹配的数据,跳过大量与自己无关的数据。
STM32的软件开发使用ARM公司推出的嵌入式开发工具MDK(Microcontroller Development Kit),它包含了意法半导体(ST)提供的STM32F10x系列处理器片上外围接口固件库(Firmware library)[6]。使用这个函数库,无需深入处理器的细节即可应用每一个外设,因而开发精力可以集中在应用软件功能的实现上。
上位机采用Linux操作系统,可以获得远高于windows的稳定性。监控软件使用C++编程,结合数据库的使用,完成对火灾信息的监控、显示、报警、联动控制,记录等功能。
5 小结
系统中使用了感温探测器,火焰探测器和烟雾火警探测器相结合的探测手段,可以有效监测船舶常见类型的火灾,实现对火灾的探测。
CAN总线和Cortex-M3处理器的使用,有效地实现了分布式火警监控系统的功能,系统响应的准确性、实时性、可靠性都得到了提高,并具有功能和容量易于扩展的优点,具有很好的应用前景。
:
[1]王常顺,肖海荣,潘为刚. CAN总线的船舶机舱监测报警系统设计[J]. 自动化与仪表, 2010, (10):25-27.
[2]李尧, 佘焱. 水泵电机综合保护装置的设计[J]. 电工技术, 2008, (10): 75-77.
[3]郄建华, 离子感烟探测器电路分析[J]. 太原师范学院学报(自然科学版). 2008, 4(7): 98-101.
[4]冯勇. 感烟感温复合探测器[D]. 合肥工业大学,2006.
[5]饶运涛, 邹继军. 现场总线 CAN原理与应用[M].北京: 北京航空航天大学出版社, 2003.
[6]李宁. 基于 MDK的 STM32处理器开发应用 [M].北京: 北京航空航天大学出版社, 2008.
