基于虚拟样机技术的舰炮发射动力学仿真*
2013-08-10王建伟
李 川 王建伟
(1.海军装备部驻重庆地区军事代表局 重庆 400042)(2.海军装备部驻武汉地区军事代表局 武汉 430064)
1 引言
射击精度是评定舰炮射击效果好坏的重要指标,炮口振动是影响舰炮射击精度的一个重要因素。研究舰炮结构的振动对射击精度的影响,可以从结构层面上为舰炮的射击提供良好的外弹道初始条件,从而提高射击精度。
舰炮作为一个结构复杂、运动自由度多的机械系统,传统的动力学分析方法已经远不能满足对其进行振动分析的需要。随着科学技术的发展,多体系统动力学分析方法已经成为研究舰炮振动的重要方法,并开发了一系列的通用的应用软件。王德石等[1~3]采用多体系统模型对舰炮的射击振动过程进行了动力学建模。杨军荣[4]等应用ADAMS和Matlab两大软件平台,建立了某双管火炮的虚拟样机联合仿真模型。
本文综合运动多个软件平台的优势,建立了舰炮虚拟样机联合仿真模型,考虑了身管的柔性,并进行了发射动力学联合仿真。仿真结果与刚性建模结果相比具有更高的精度,更贴近舰炮发射的真实情况。仿真结果对舰炮射击精度的提高和结构的优化都具有一定的参考价值。
2 舰炮总体模型
为了能够获得较精确的结构参数和相关物理参量,应用Pro/E软件建立了舰炮的总体三维实体模型。权衡计算的经济性和计算结果的精确性,将舰炮简化为六大部分:后坐部分、摇架部分、高低齿弧部分、高低机部分、炮架部分以及回转支撑部分,拓扑结构[5]如图1所示。其中,H1为旋转副,H2为耦合副,H3为移动副,H4和H6为固定副,H5为接触副。后坐部分在炮膛合力Fpt、驻退机力Fzt和复进机力Ff等力的作用下,在摇架上做后坐复进运动;摇架通过耳轴支撑在炮架上,后部的大齿弧与高低机的主齿轮啮合;炮架坐落在回转支撑上,在方向机的作用下实现回转运动;回转支撑与军舰固连。
3 联合仿真模型的建立
为实现联合仿真,利用Pro/E建立的总体三维模型,导入ADAMS平台[6]建立舰炮的虚拟样机仿真模型;利用Matlab/Simulink[7]建立内弹道计算模型,炮膛合力、驻退机力和复进机力的计算模块;最后利用ADAMS/Control模块和Matlab/Simulink/adams_sys模块建立联合仿真模型,从而实现两大软件之间的信息封闭循环,如图2所示。
3.1 基于ADAMS的虚拟样机模型
将建好的舰炮三维模型导入ADAMS中,定义各部件之间的约束关系,可得舰炮多刚体仿真模型。
考虑到舰炮身管在发射时存在较严重的弹性变形和振动,对炮口的动态响应产生较大影响,故在动力学仿真时必须考虑身管的柔性。
利用有限元软件建立身管的柔体模型,进行模态计算,生成mnf文件,导入ADAMS中,可得舰炮的刚柔耦合模型。身管有限元模型如图3所示。

图3 身管有限元模型
3.2 基于 Matlab/Simulink的计算模型
3.2.1 内弹道计算模块
炮膛合力计算数学公式如下:
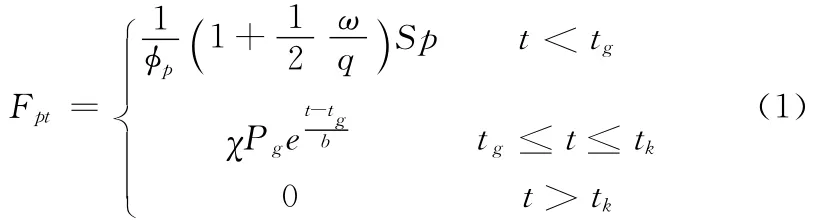
式中,φp为次要功系数;ω为发射药质量;q为弹丸质量;S为炮膛截面面积;p为火药气体平均压力;tg和tk分别为弹丸出炮口时间和后效期结束时间。
利用Matlab/Simulink软件,根据该炮的内弹道方程及其相关参数,建立内弹道计算模块如图4所示。
3.2.2 炮膛合力、驻退机力及复进机力计算模块
该炮采用典型的带复进节制器的沟槽式驻退机和气压式复进机。
复进机力计算公式如下

式中,Ff0为初始压力,n为多变指数,Ls为复进机初始容积的有效长度。
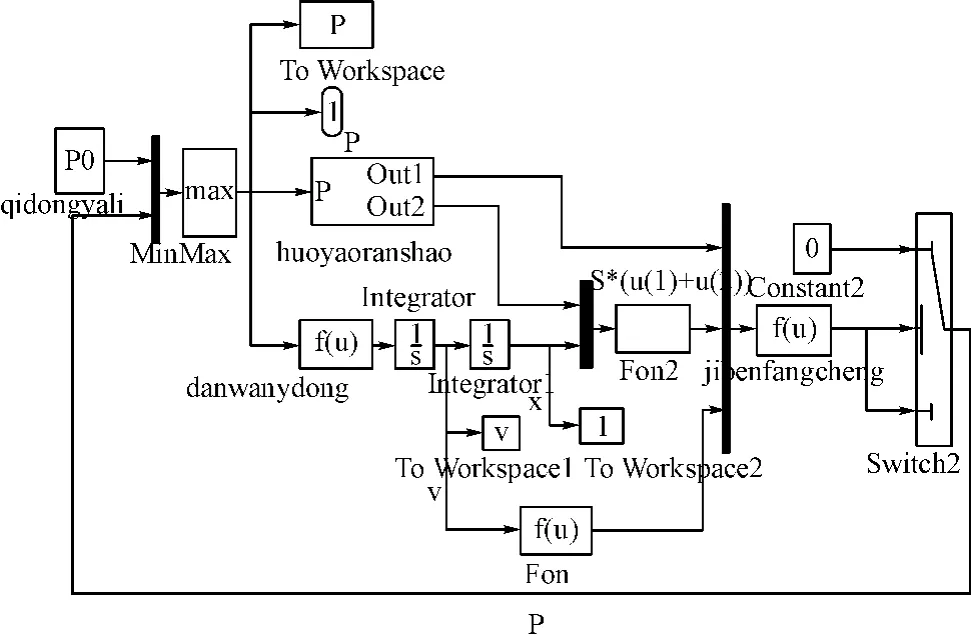
图4 内弹道计算模块
驻退机力计算公式如下:
式中,A0为驻退机后坐时活塞有效工作面积;Ap为节制环内孔面积;Afj为复进节制腔工作面积;A1为后坐时驻退机支流通道的最小面积;aX为驻退机主流液孔面积;K1,K2,K1f,K2f为液压阻力系数;ρ为驻退液密度。
依据这类反后坐装置的驻退机力和复进机力的计算公式,分别建立作用于炮身的驻退机力和复进机力计算模块如图5所示。
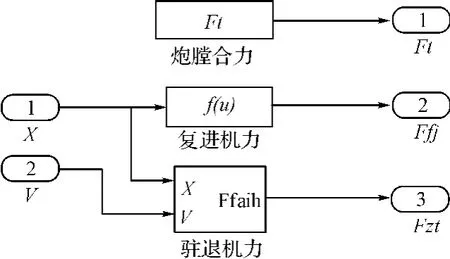
图5 炮膛合力、驻退机力及复进机力计算模块
ADAMS模型输出仿真中炮身的后坐位移X和后坐速度V,经过Simulink模块的相关处理,得到炮膛合力、驻退机力和复进机力,并反馈给ADAMS模型。
3.3 联合仿真模型
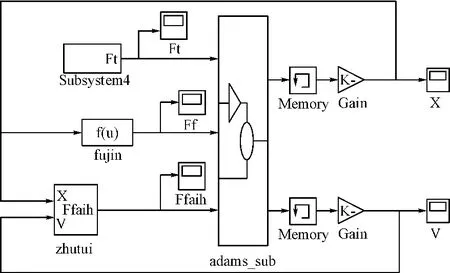
图6 舰炮联合仿真模型
在Matlab/Simulink软件中打开adams_sys窗口,并将计算模块输入其中,如图6所示。完成相关的参数设置,即可仿真计算。
4 动力学仿真及结果分析
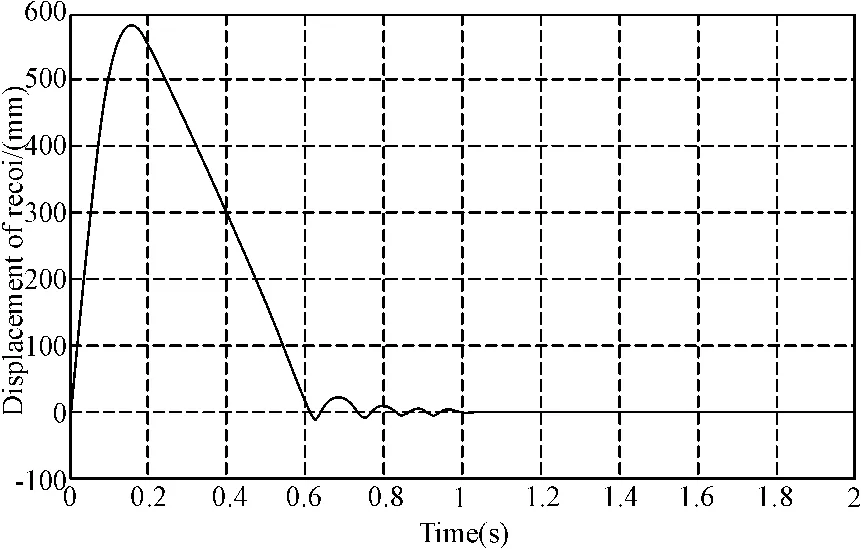
图7 舰炮后坐部分后坐位移曲线
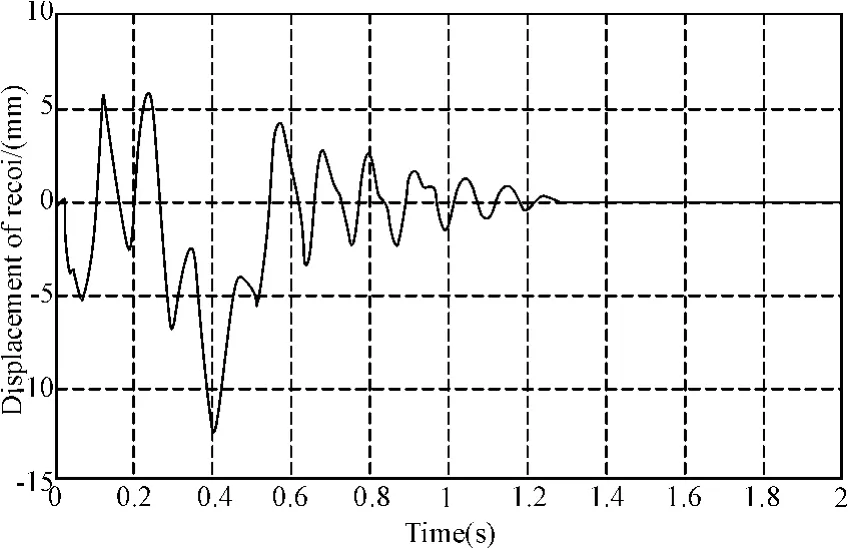
图8 舰炮炮口振动曲线
利用上面所建的联合仿真模型,并将该炮的内弹道参数和相关结构参数编制成Matlab的m文件,利用AD-AMS与Matlab/Simulink软件平台,进行了舰炮发射动力学联合仿真。动力学仿真之前,首先进行静平衡分析,并作为动态分析的初始状态。联合仿真的部分结果如图7、图8所示。
图7说明了舰炮后坐部分的运动过程,与试验数据比较,最大后坐位移及时间误差不超过5%,可以认为仿真结果比较真实、可信。
5 结语
现在,市场上存在大量的各类应用软件,并在某一方面具有强大的功能。本文充分利用各个软件的自身优势,基于多个软件平台,建立了舰炮刚柔耦合动力学虚拟样机模型,得到了相关部件的运动特性和炮口响应,为舰炮的射击精度预测及系统优化提供了方法。
[1]王德石.基于多刚体动力学的舰炮系统振动分析[J].火炮发射与控制学报,1998,(4):1-6.
[2]王德石,史跃东.火炮振动分析与多体系统模型研究[J].动力学与控制学报,2012,10(4):303-324.
[3]史跃东,王德石.舰炮刚柔耦合动力学分析[J].弹道学报,2010,22(1):37-44.
[4]杨军荣,何永,米粮川.基于虚拟样机的双管炮动力学仿真[J].南京理工大学学报,2006,30(4):339-343.
[5]洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,1999:201-210.
[6]范成建,熊光明,周明飞.虚拟样机软件 MSC.ADAMS应用与提高[M].北京:机械工业出版社,2006:214-240.
[7]刘会灯,朱飞.Matlab编程基础与典型应用[M].北京:人民邮电出版社,2008:405-416.
