一种大功率窄带电调滤波器设计
2013-08-08唐京洲
魏 强 ,王 彬,唐京洲
(中国电子科技集团公司第二十六研究所,重庆 400060)
1 引 言
电调滤波器在电子对抗、雷达、通信等系统中应用广泛,要求其频率选择性高、损耗低,并需承载一定功率,是提高系统抗同址干扰的重要技术手段,也是现代微波系统的重要部件[1]。
电调滤波器主要有基于机械结构的电调滤波器[2]、基于集总参数元件的电调滤波器[3]和基于MEMS技术的电调滤波器[4]3种实现方式,它们各有特点:机械电调耐受功率大,集总参数电调调频速度快,MEMS电调体积小,其基本原理都是通过变化谐振电抗来调频。但窄带大功率电调滤波器鲜见报道。
综合文献分析,电调滤波器设计存在两个难点:一是失谐问题[2],如何解决滤波器在调谐过程中幅频响应形状和相对带宽随中心频率的变化而发生显著变化的问题;二是控制精度问题[5],电调滤波器是典型的机电一体化产品,如何解决温度漂移、振动冲击等多种因素造成的滤波器目标中心频率与实际中心频率的误差问题。
本文介绍了采用同轴腔结构实现窄带电调滤波器设计方法,分析了耦合补偿机构和运动控制执行机构的软硬件设计,并在此基础上完成了电调滤波器的研制,实验结果表明其满足工程需求。
2 电调滤波器设计
2.1 指标需求分析
某机动式指挥方舱组网系统中,要求滤波器技术指标如下:频率范围为116~152 MHz(VHF)、225~400 MHz(UHF);带宽大于等于 f0×0.25%MHz;插入损耗不大于2.5 dB;矩形系数(30 dB/3 dB)小于等于 2;承受功率不小于100 W;调频最小步进25 kHz;调频时间不大于20 s。
由此可见,调谐精度高、窄带、低损耗和大功率是本滤波器的技术难点。
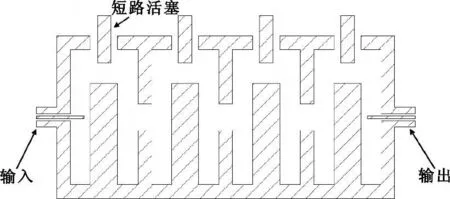
图1 调谐滤波器结构Fig.1 Structure of tunable filter
采用网络综合法,经计算选用四阶切比雪夫滤波器实现,低通原型参数为:g0=0.712 8,g1=1.200 3,g2=1.321 2,g3=0.647 6,g4=1.100 7。将低通原型网络用K变换器变换,可得滤波器的集总参数网络。
2.2 腔间耦合结构设计
电调滤波器腔间耦合常采用圆孔、矩形孔等结构,可通过HFSS、CST等电磁仿真软件精确计算求取。耦合孔尺寸的确定是确保滤波器在调谐过程中幅频响应和绝对带宽保持恒定的保证。
耦合结构的耦合带宽Δf和频率、耦合系数的关系为

文献[2]已证明,对于圆形耦合孔,耦合电抗

对于矩形耦合孔,耦合电抗

式中,M和p分别是孔的磁极化率和电极化率,kij为滤波器综合中给出的耦合系数,Xi为谐振腔的电抗斜率,gi、gj是滤波器的归一化低通原型值,Z0是同轴腔的特性阻抗,r0为同轴腔耦合孔半径,a为矩形孔的边长,L为孔中心到同轴腔短路端的距离,c为光速,f0为中心频率。在Cohn的实验表格中可以查到相应尺寸的M值。
而L尺寸的确定是确保性能的关键。在同轴腔短路端,不同谐振频率f所对应的磁场强度H有如下关系:

其中,H1对应f1,H2对应f2。四分之一波长同轴谐振腔内短路端的磁场强度最大,沿开路方向逐渐减小。高频端磁场强度的变化速率大于低频端。L要选定在高频和低频磁场强度相等的位置,可采用仿真软件参数扫描的方法确定其值。
文献[6]报道了采用三角环加矩形孔的耦合结构,但工程调试复杂,因此我们设计了圆形和矩形两种耦合孔方案。测试结果如表 1所示,在118~400MHz的频率范围内,两种耦合结构3 dB带宽基本保持一致,而圆孔高低端的30 dB带宽变化比为1.33,矩形孔高低端30 dB带宽变化比为1。
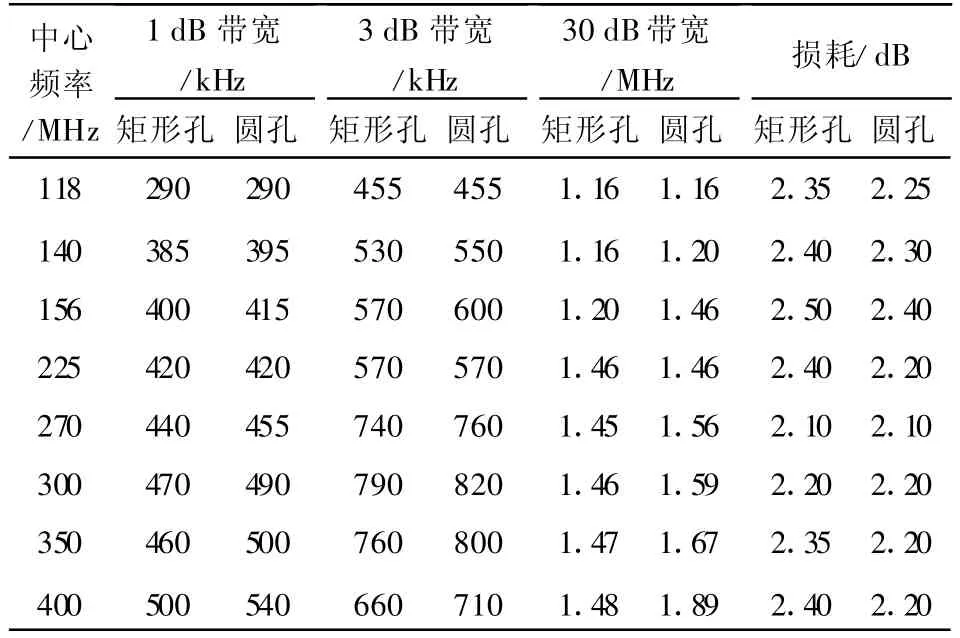
表1 圆孔和矩形耦合孔对比测试结果Table 1 Test result of round hole and rectangle hole
文献[2]给出圆孔耦合调谐范围小的结论。工程实验表明,通过合理设计,圆孔和矩形孔均能实现宽范围调谐,但采用矩形孔能取得更好的频率带宽特性。
2.3 耦合补偿结构设计
电调滤波器设计难点是要解决滤波器失谐问题。由于加工精度以及腔间互耦的影响,滤波器各谐振腔分别工作在不同的谐振点上,调节一个腔体的谐振频率会带来相应耦合系数以及相邻腔间的谐振频率的变化。随着调谐的继续,不同腔谐振频率差异不断变化,偏离达到某一程度后,这种腔间谐振频率的差异就会破坏滤波器的幅频响应。
工程实现中解决滤波器失谐可在输入、输出腔中引入补偿结构。电调滤波器的调试主要调整输入输出耦合环和补偿结构两个元件。调输入输出耦合环形状可实现外端口和滤波器阻抗匹配,同时改变环面积以改变耦合量。调补偿结构则是通过改变膜片形状,以实现在各频率点上对腔内电抗变化的补偿,从而在整个调谐过程中滤波器的响应形状和相对带宽保持不变。
3 运动机构设计
3.1 运动机构硬件设计
通过理论仿真分析,得到短路活塞行程和频率关系为2MHz/1 mm,如图2所示,即短路活塞移动1 mm,频率变化2 MHz,而且在调谐范围内,两者近似线性关系。要满足25 kHz的调谐精度,要求活塞移动行程12.5 μ m,除了对运动部件的加工精度有较高要求外,还需合理设计运动机构才能满足要求。
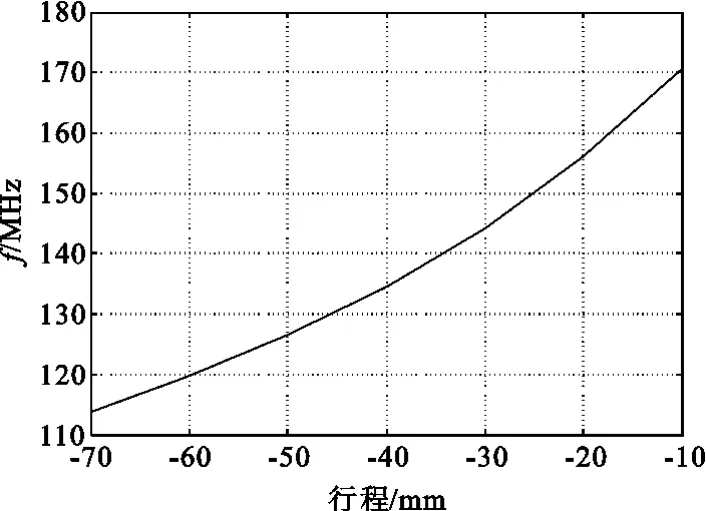
图2 短路活塞行程和频率对应关系仿真结果Fig.2 Simulation result of short rod vs.frequency
我们设计了如图3所示的运动机构。由步进电机带动丝杆螺母副将旋转运动变为直线运动,带动短路活塞在腔体内上下运动,调整内导体在滤波腔体中的长度,达到调谐滤波的目的。步进电机、检测单元和控制单元组成一个闭环系统。

图3 运动执行机构框图Fig.3 Structure of moving component
零点位置检测单元电路由3个光电开关组成。LOW和HIGH分别为限制调谐频率的最低点和最高点。当LOW或HIGH指示灯亮时,立即给控制单元一个中断信号,以防电机转动越界,导致驱动器损坏。HOME是滤波器调谐的基准起始点,为了精确定位,消除累计误差和结构应力回差,滤波器设置了运动零点,当通信机工作频率变化时,步进电机先回基准零点,然后调谐到相应的位置。
滤波器执行机构运动零点的确定采用了初零、细零和步进电机机械零点三级控制方法,实现了执行机构运动零点的唯一性,提高了频率调谐的准确度。
滤波器腔体和运动机构为机械结构件,性能的调整只能依靠存储的数据,而温度等环境应力变化会恶化滤波器性能。因此,在运动控制系统中增加了补偿机构,使环境应力变化引起的频漂得到抑制,提高了系统的精度,也增加了系统的环境适应性。
3.2 运动机构软件设计
对一个优秀的运动控制系统,软件和硬件的设计都很重要,任何一个方面有缺陷,都不能保证控制精度。滤波器控制软件程序框图如图4所示。根据硬件构成,初始、故障复位、运动、补偿4个子函数构成了控制主程序。
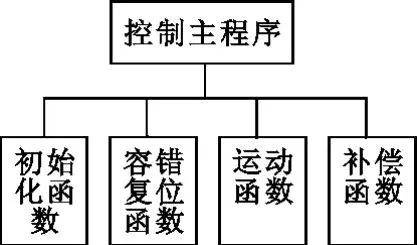
图4 滤波器控制软件流程框图Fig.4 Flow chart of control software
软件做了如下考虑以确保系统精确、可靠:
(1)为保证滤波器调谐精度,同时减小调试工作量,每1 MHz间隔给出一个距基准零点的步数;在满足线性关系的情况下,非整数点频率可通过图2给出的曲线建立函数关系,查找计算求出;
(2)为保证精确点位控制,系统采用变速启动,电机启动时速度最低,逐渐加速保持恒定,当接近点位时又降为最低,最后锁定;
(3)为防止因硬件检测出现故障时电机失控,设置电机单次运行最大步数,一旦超界,电机将自动停下;
(4)若上位机发送超界或错误频率信息,滤波器则工作于基准频率点上。
3.3 调谐步数存储
该电调滤波器将步进电机的旋转运动转变为短路活塞的直线运动,将频率值映射为步进电机的运动参数,从而实现中心频率的改变,但无法预知所需中心频点对应的电机步进值是多少,因此,应找到每个中心频率有可能对应的步进值,并把这些值存储在存储器中以便调用。
调试时先设定一个步进值由系统控制电机转动,控制网络分析仪测试此时的中心频率值,然后判断该值与目标中心频率是否在允许的误差范围内,如果误差越界,由系统增大或减小步进电机值并再次测试中心频率值,如此循环直至满足要求,最后保存该步进参数。
以后只需输入目标中心频率值,程序会调用存储器中对应的电机步进参数,使电机旋转该步进值,从而把滤波器调至目标中心频率点。
4 实验结果
根据上述设计思路,对电调滤波器进行了实物加工,使用Agilent E5071C网络分析仪进行测试。在室温25℃下实测结果如图5所示,3组曲线分别对应中心频率为225 MHz、300 MHz、400MHz时的频响和驻波特性。
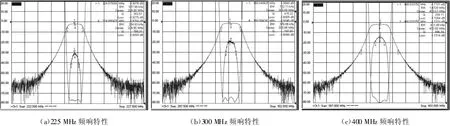
图5 滤波器频响测试结果Fig.5 Test result of the filter
从结果可以看出,在整个调谐范围内,预期中心频率与实际中心频率误差小于0.05%。滤波器的响应形状和相对带宽保持不变,在整个调谐过程中,3 dB带宽小于等于 f0×(0.25%~0.27%),矩形系数(30 dB/3 dB)小于等于2,插损小于等于2 dB,驻波小于等于1.5。
文献[7]中报道的电调滤波器类似产品,其指标为:3 dB带宽小于等于 f0×(1.03%~1.05%),矩形系数(30 dB/3 dB)小于等于2,插损小于等于1.7 dB。
本文设计的电调滤波器在保持矩形系数、插入损耗相当的情况下,其带宽缩小了4倍,为整机提供了更好的电磁兼容性。
5 结束语
大功率窄带电调滤波器涉及电磁场、软件控制和机械结构等多学科背景,是一个复杂的机电耦合系统,具有非常广阔的应用前景。结合工程实际所需,本文研制的同轴腔电调滤波器具有高 Q值、高矩形系数、承受功率大的特点,且有新颖性,未见类似公开报道,在系统应用中性能稳定,已批量生产。但步进电机的使用,使其存在调谐速度慢的缺点(秒级),因此研制调谐速度更快的电调滤波器是今后的发展方向。
[1] 鞠瑞林.机动式指挥系统方舱多电台同址抗干扰设计[J].指挥信息系统与技术,2012,3(2):54-57.JU Rui-lin.Multi-radio Co-site Anti-interference Design for Mobile Command and Control Shelter[J].Command Information System and Technology,2012,3(2):54-57.(in Chinese)
[2] 姚毅,贾金岭.调谐滤波器的失谐分析及调谐方法[J].四川轻化工学院学报,1999,12(4):6-8.YAO Yi,JIA Jin-ling.Distuning Analysis and T uning Method of T uning Filter[J].Journal of Sichuan Institute of Light Industry and Chemical Technology,1999,12(4):6-8.(in Chinese)
[3] 杨玲玲.高性能跳频滤波器设计[J].电讯技术,2011,51(7):161-165.YANG Ling-ling.Design of a high-performance Frequencyhopping filter[J].Telecommunication Engineering,2011,51(7):161-165.(in Chinese)
[4] Fouladi S,Huang Fengxi.High-Q Narrowband Tunable Combline Bandpass Filters Using MEMS Capacitor Banks and Piezomotors[J].IEEE Transactions on Microwave Theory and Techniques,2013,61(1):393-402.
[5] 甄立冬.电调双工滤波器制造工艺研究[J].电子机械工程,2009,25(5):46-49.ZHEN Li-dong.A Study on Fabrication of Electrically Tuned Duplex,Electro-Mechanical Engineering,2009,25(5):46-49.(in Chinese)
[6] 吴恒恒,张忠海,官伯然.平衡腔体滤波器高低端带宽的耦合环研究[J].杭州电子科技大学学报,2009,29(3):32-35.WU Heng-heng,ZHANG Zhong-hai,GUAN Bo-ran.A Study on Novel Design of Coupling Hoops of Balancing Bandwidth Use in Cavity Filters[J].Journal of Hangzhou Dianzi University,2009,29(3):32-35.(in Chinese)
[7] 朱华彬,漆兰芬.多腔体射频可调滤波器的研究[J].华中科技大学学报,2003,31(2):87-89.ZHU Hua-bin,QI Lan-fen.The Study of Multiple-Cavity RF Tunable Filter[J].Journal of Huazhong University of Science and Technology,2003,31(2):87-89.(in Chinese)