三峡垂直升船机高精度混凝土施工测量技术实践
2013-08-06邱章云罗琛晏春波
邱章云,罗琛 ,晏春波
(中国葛洲坝集团股份有限公司测绘工程院,湖北宜昌 443002)
1 工程概况
三峡垂直升船机是三峡水利枢纽的永久通航设施之一,主要作用是为客货轮提供快速过坝通道,并与双线五级船闸联合运行,保障枢纽通航质量。三峡升船机为齿轮齿条爬升式垂直升船机,过船规模为3000 t级,最大提升高度为113 m,具有提升高度大、提升重量大、施工精度要求高等特点,是目前世界上规模最大和技术难度最高的升船机。船厢室为超高层建筑物,平面尺寸为121.0 m×58.4 m,底板顶高程50.0 m,高程50.0 m~196.0 m之间为承重结构塔柱,对称布置在升船机中心线两侧,每侧塔柱由墙筒体墙筒体墙组成,长119.0 m,宽16.0 m,两侧塔柱之间的距离为25.8 m,为升船机船厢室的宽度。驱动系统齿条和安全机构螺母柱均安装在筒体部分凹槽内的墙壁上(如图1所示)。其结构复杂,施工强度大,精度要求高,测量控制难度大,质量和形状尺寸要求极其严格。为此,葛洲坝测绘工程院深入开展课题科研,研发了一套行之有效的高精度混凝土的施工测量方法及措施。
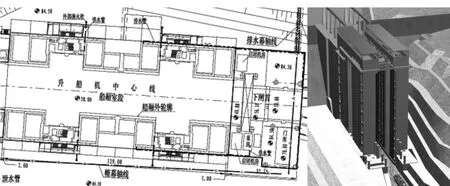
图1 三峡升船机略图
2 三峡升船机混凝土施工测量精度控制要求
升船机施工精度要求极为严格,很多限差指标都超过了国家标准《工程测量规范》和行业标准《水电水利工程施工测量规范》的标准。一般立模浇筑的混凝土测量放样点位中误差不得超过表1的规定;塔柱结构、顶部机房结构等特殊形体施工测量允许误差见表2规定;塔柱结构、顶部机房结构等特殊形体混凝土结构成型后的偏差不超过表3的规定。

建筑物轮廓点测量放样点点位中误差 表1
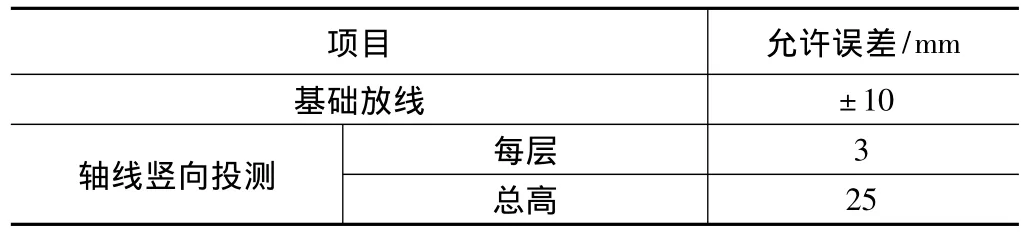
塔柱结构及顶部机房结构施工测量允许误差 表2

续 表2

混凝土结构面允许偏差 表3
3 三峡升船机混凝土施工测量的技术特征
(1)控制网布设空间狭小,升船机布置在枢纽左岸,永久船闸右侧、左岸7#、8#非溢流坝段之间,两侧开挖后,山坡陡峻,施工范围狭小,布设的控制网平均边长较短,控制点间的高差较大;最弱点点位误差要求小于±2 mm。
(2)测量精度要求高。施工层放线、截面尺寸控制、平面轴线放线、金属结构预埋件放样等精度要求均在3 mm~5 mm之间;平面和高程基准的垂直传递精度要求也均小于±3 mm。
(3)测量技术难度大。三峡垂直升船机高薄壁塔柱结构受温度、风力、自重、船厢室及平衡重的影响导致变形,且部分结构部位的变形值大于结构施工放样的允许误差,结构尺寸控制难度大。
(4)测量作业条件恶劣。因施工范围狭小,土建施工和金属结构安装交叉作业,通视受到严重影响,存在高空坠落危险,控制点极易毁坏。
4 主要测量仪器设备
根据三峡垂直升船机土建施工的精度要求,测量仪器主要采用Leica公司生产的TCA2003全站仪(标称精度:测角0.5″,测距 1 mm+1 ppm)和 DNA03数字水准仪(标称精度:±0.3 mm/km)以及索佳公司推出的 NET05全站仪(标称精度,测角 0.5″,测距0.8 mm+1 ppm)。垂直投影采用大连拉特公司生产的最高精度JZC-G20A激光天顶仪,垂直投影标称精度 1∶200000。
5 混凝土结构线测量控制点的设立
5.1 平面基准垂直传递技术
(1)建立高精度施工测量控制网,控制网的观测采用 TCA2003自动观测,最弱点点位误差≤±1.2 mm。高程控制网点与平面网点重合布设,按一等水准测量要求布设成闭合环线。利用布设在50 m高程底板的控制点,一次性将结构轮廓点、结构轴线点、螺母柱、齿条及纵导向等关键控制点布设50 m高程底板上,如图2所示。
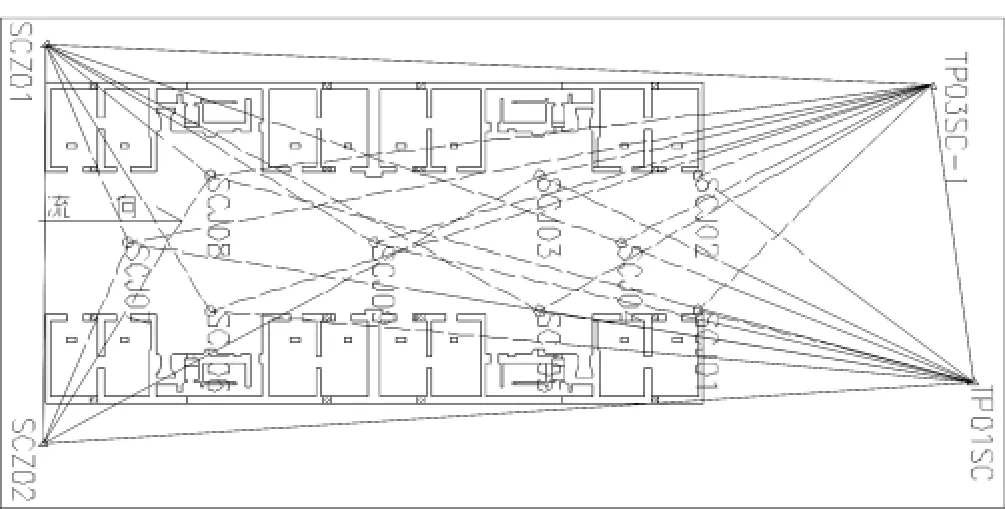
图2 布设在50 m高程底板上的控制网图
(2)由于升船机塔柱受温度、日照、风力等影响自身变形较为复杂,为了确保上下基准高度一致,采用JZC-G20A激光自动天顶仪将平面控制点由底板50 m高程面垂直投测至作业仓面,如图3所示。
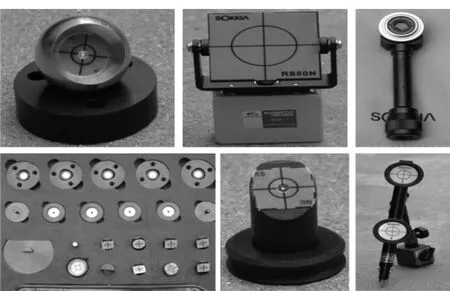
图3 激光天顶仪投测示意图
(3)各施工仓面模板粗调采用全站仪极坐标法放样,隐蔽部位或视线遮挡,我们采用一些特殊工装进行间接测量,可以起到事半功倍的效果。如选用望远镜弯管目镜,可进行角度较大的仰角观测以及天顶观测;选用专用反射贴片、精密测量杆以及工业测量中用到一些专业工装和附件可以解决置镜困难的问题,如图4所示。

图4 特殊测量工装及附件
(4)模板精调或验收时,将激光天顶仪架设在50 m高程底板上的投测点,直接将平面位置引测到各施工仓面,形成各仓面结构控制线;同时可作为砼浇筑过程中模板位移的监测线。
5.2 高程基准传递技术
三峡升船机塔柱筒体受风、日照、自重荷载、船厢室及平衡重荷载、混凝土干缩等因素的影响,施工期最大竖向变形约为2.5 cm。因此施工期间歇时间稍长,则需要重新从底板进行高程基准的传递。经过理论计算和现场试验,选取电磁波测距传递法传递高程基准,如图5所示。

图5 电磁波测距法高程传递
为验证电磁波测距传递基准高程的精度,我们在升船机附近已浇筑的非溢流坝段选取了两个控制点,一个在船箱室底板51 m高程平台附近,另一个在坝顶185 m高程平台上。按一等水准测量的要求进行往返观测,从船箱室底板施工便道引测至上坝公路,沿上坝公路闭合,水准路线长3.8 km,合计观测两天时间,实测两点的高差为134.5847 m。随后采用电磁波测距传递高程法观测,分上下午时段,共观测8测回,实测高差平均值为134.5849 m,且每测回偏差极小。两种方法量取仅相差0.2 mm。
5.3 应用塔柱结构施工期变形观测成果指导混凝土施工
施工过程中对塔柱结构的外部变形进行了全天候、实时、三维变形(平面位移及垂直位移)观测与分析,采用DNA03数字水准仪及TM30高精度自动观测全站仪结合处理软件组成塔柱结构变形监测系统,在整个施工过程中不间断地收集整理分析塔柱结构施工期变形资料。通过对塔柱不同结构轴线和不同高度面布设监测点的变形监测资料分析,掌握了塔柱筒体、螺母柱、齿条、纵导向等部位在不同季节纵向和横向的变形规律。对不同结构轴线、不同高度,根据变形规律,选择变形最小时间段进行投测和观测,尽量减小变形对投测放样和检测验收的影响。
6 混凝土浇筑施工测量放样
平面位置放样常用的方法有两种:①极坐标法;②方向线法。根据施工现场的条件和建筑物几何图形繁简程度,选择最合适的定位放样方法。高程放样采用光电测距三角高程测量;平面放样采用高精度全站仪。以专用平面控制网点直接作为放样设站点,设站点采用二维平移平台实现精确对中(对中误差不大于0.2 mm,如图6所示),点位精度可以控制在±2 mm以内,在塔柱施工放样时,通常采用0.5″级的高精度全站仪进行观测,取放样距离200 m,则平面点位中误差Mp最大不超过±3 mm,放样点高程中误差可控制在±5 mm以内,满足该形体土建立模的精度要求。引入每个筒体内的标高不少于6个,以便于相互校核。

图6 二维平移台及使用
对于施工控制网点无法覆盖的部位,可以利用底板50 m高程面上的结构轴线控制点,用激光天顶仪将控制点坐标投测到各施工层。再用全站仪进行角度、距离校测,符合点位限差要求后,作为方向及轴线放样的加密控制点。在通视条件困难的地方采用极坐标法加以补充,相互校核,以保证放样的精度。
7 混凝土浇筑模板验收测量
在升船机混凝土施工过程中,对已架立的模板、预制(埋)件进行形体和位置的检查,测设各种建筑物的立模形体质量是否满足设计要求。测量精度与施工放样精度相同,平面点位中误差Mp最大不超过±3 mm,高程中误差控制在±5 mm以内。其模板验收测量分两步进行,一是直接利用全站仪进行模板初调;二是利用激光天顶仪采用投测方法进行模板终调。
采用激光天顶仪将结构线控制点平面位置引测至与模板相应的高程面上,两投测点之间张拉一根细线,利用细线对模板进行模板精确验收和调整,直至满足设计要求时加固模板,同时在已加固完成的模板上口与投点一致的位置焊接二根强度较高的钢筋,根据投测坐标在二根钢条上拉一条钢丝,形成检测样架,作为以后砼浇筑过程中模板位移的监测线。为保证混凝土体的形体,在模板立好后必须进行验模,并将模板调校至允许范围之内。
8 注意事项
采用激光天顶仪投测轮廓点,要求在风力较小时段(一般应小于3级)且上午日出之前(最好选择在0∶00 am~6∶00 am)或是在阴天进行,以减少温度和风力对筒体或塔柱变形的影响。为保证混凝土体的形体质量,在浇筑模板根据放样点调校好后必须进行验模工序,将模板校正至允许范围再进行加固。
9 结语
结合三峡垂直升船机筒体混凝土施工精度高的特点,我们采用了高精度的测量仪器设备,研究摸索出一套独到的测量方法完成了升船机混凝土的形体控制。该施工测量控制方法自2009年6月投入到实际操作中以来,混凝土形体尺寸偏差控制良好,解决了高精度混凝土形体控制的施工难题。
此套施工测量控制方法的使用,减少了重复性放样及模板验收工作,测量作业功效大为提高,使得整体施工进度明显加快,提高了工程效益。在确保了混凝土形体控制的同时,为后期的金属结构及机电设备安装提供了精度保障。
[1]李青岳,陈永奇.工程测量学[M].北京:测绘出版社,2002.
[2]张正禄.工程测量学[M].武汉:武汉大学出版社,2005.
[3]吴子安,吴栋材.水利工程测量[M].北京:测绘出版社,1993.
[4]周心力.高层建筑竣工测量的组织与施测[J].城市勘测,2007(5).
[5]宋超,熊琦智.三角高程测量在地下轨道交通工程联系测量中的应用[J].城市勘测,2012(1).
[6]DL/T 5173-2003.水电水利工程施工测量规范[S].
