过程控制系统仿真与实践结合的实验教学设计
2013-08-02杨光祥曹晓莉胡卫军王荣秀
杨光祥,梁 华,曹晓莉,胡卫军,王荣秀
(1.重庆工商大学 检测控制集成系统重庆市市级工程实验室,重庆 400067;2.电子商务及供应链系统重庆市重点实验室,重庆 400067)
过程工业在社会生产中起着非常重要的作用,过程控制覆盖范围广,在国民经济中占有极其重要的地位。“过程控制系统”是针对本科生讲述的一门专业主干课程,属于电子信息、计算机等多专业领域的交叉课程,要求学生通过所学的专业基础知识,结合PID控制理论,掌握过程控制系统的原理、结构、特点、设计方法和应用等。因此,学生对本课程专业知识的掌握是以后工作中能够正确设计过程控制系统的关键[1]。
“过程控制系统”实验课程能够加深学生对过程控制系统的理解,培养学生的实践能力,使学生在过程控制系统的设计和分析过程中将所学的理论知识融会贯通。传统的过程控制系统课程以理论教学为主,配备简单的液位控制系统设备开设实验课。但是,由于普通液位控制系统设备的操作和验证过程比较繁琐,实验数据记录和存储困难,学生的注意力往往集中在怎样完成实验,而缺乏甚至忽视对实验所要验证内容的本质的理解和掌握。
本文对过程控制系统实验教学进行改革,将Matlab仿真技术和实验设备结合,并融入理论知识,设计仿真模型,通过简单、快速的仿真过程,让学生对过程控制系统的本质和控制对象的动态特性有比较深刻的认识和理解。
Matlab仿真软件是用于算法开发、数据可视化、数据分析以及数值计算的高级计算语言和交互式环境,主要包括 Matlab和 Simulink 2部分[2-3]。该软件一直把面向控制工程应用作为主要的功能之一,其特点是简洁和智能化,使得编程和调试效率大大提高。
Simulink是一个用来对动态系统进行建模、仿真和分析的软件包,利用Simulink的强大功能,可以很容易地构造复杂的控制系统模型,并能在控制算法运行过程中对仿真模型的参数进行在线修改,模拟实际生产过程中的各种干扰、被控对象模型的变化等,并可立即得到修改后的仿真结果。一些高校还专门开设了仿真实验课程[4-5]。因此,本文提出一种 Matlab仿真实验与过程控制系统实验相结合的教学改革方法,它将有助于学生更加深入地掌握过程控制的规律和特性。
1 实验改革方案
传统的过程控制系统实验采用简单液位控制对象,分别设置了单容和双容对象的液位控制实验,是过程控制系统典型的实验教学内容[6-7]。液位控制系统是一个有自平衡能力的一阶惯性环节。为了能够使学生掌握一阶惯性环节的特性和PID控制规律特点,在进行实物操作实验的同时,应该设计出仿真模型,让学生能够在实际操作中,结合仿真模型和仿真调试结果理解实验结论,这有助于提高学生对专业基础知识的形象理解。本实验教学改革方案如图1所示。

图1 实验改革方案
本改革方案主要针对学生在实验过程中对理论理解不够深入、实验数据收集困难、实验数据准确性差的特点,设计相应的仿真实验,以对实物实验进行验证,可以使学生更加深入地掌握对象动态特性和PID控制规律,以及参数整定的方法。由于在实际应用实验中没有参数整定实验,只是在理论教学中有部分介绍;而参数整定在工程实际应用中非常重要[8-9],是决定一个控制系统能否正常工作和工作质量优劣的关键;因此,在仿真实验中增加了参数整定的设计和验证。
2 仿真实验设计
在Simulink软件环境下,采用传统PID控制器和一阶惯性环节的被控对象,建立控制系统模型。本仿真实验改革方案结合实际液位设备对象,设计了4个仿真实验,分别描述如下。
实验一:Simulink建模基础知识及基本操作。实验目的:
(1)了解Simulink基本模块组;
(2)掌握 Continuous、source、sinks等模块组的使用方法;
(3)掌握Simulinik建模仿真基本方法。
实验二:PID控制器建模及控制规律。实验目的:
(1)掌握基本PID控制规律和建模方法;
(2)验证PID控制规律特点。
实验三:PID控制器参数选择及性能指标计算。实验目的:
(1)掌握PID控制器参数调节方法和实际应用;
(2)掌握PID控制系统递减比、超调量、调整时间等指标的实验测试方法。
实验四:基于Simulink的PID参数整定方法仿真。实验目的:
(1)掌握PID参数整定方法及意义;
(2)掌握利用Simulink对PID进行参数整定的方法;
(3)掌握用稳定边界法进行参数整定的基本方法;
(4)掌握用衰减曲线法进行参数整定的基本方法。
本文仅以参数整定为例,对仿真实验进行重点介绍。
3 参数整定仿真实验
在参数整定实验中,利用标准PID控制器,对被控对象进行控制,控制模型如图2所示。
其中,对象传递函数为:

测量装置和调节阀的传递函数为:

PID控制器传递函数为:

利用稳定边界法整定参数过程为:
(1)将积分系数和微分时间分别设置为0,Kp设置较小值,PID使系统稳定运行;
(2)逐渐增大比例系数Kp,直到系统出现等幅振荡;记录此时Kp和振荡周期T;
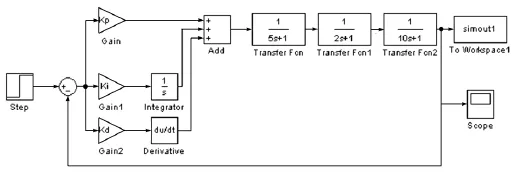
图2 参数整定的控制模型
(3)按照1表经验公式整定参数,然后再进行校验。

表1 稳定边界法整定参数经验公式
根据稳定边界法,首先设置3个参数为:

得到系统阶跃响应曲线如图3所示。

图3 阶跃响应曲线(Kp=1,Ki=0,Kd=0)
从图形看,虽然系统是稳定的,但该结果明显存在较大的稳态误差(系统理论稳态值应该为阶跃信号幅值1,但是本结果稳态值为0.5)。可以采用稳定边界法对系统参数进行整定,以获取最佳的系统性能。
采用逐步逼近的方式,首先将Kp设置为比较大的值,然后依次调整,直到系统出现如图4所示的等幅振荡,记录此时的Kp和振荡周期T:Kp=12.5s,T=15.2s。
然后根据表1的参数整定经验公式,整定其各个参数:

图4 等幅振荡曲线

重新仿真得到阶跃响应曲线如图5所示。

图5 参数整定后系统阶跃响应曲线
根据仿真结果,测量递减比、超调量、调节时间分别为3∶1、60%,40s;由于超调量大,再次进行整定,采用减小Ki,即增大积分时间常数,减小积分作用,可以使系统稳定性增强,从而减小其超调量。令Ki=0.5,再次仿真得到如图6所示的结果。
再次整定后,计算结果为:超调量在大约35%,调整时间大约为33s,是可以接受的,这时递减比大约为

实验要求学生再次尝试用衰减曲线法整定参数,不再赘述。
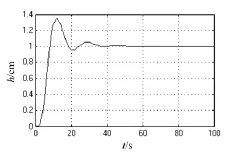
图6 参数整定再次调整后阶跃响应曲线
通过参数整定过程的设计和分析,学生普遍反应对参数整定有了比较直观的认识,对PID控制规律各个参数对系统性能的影响有了明显的理解,比单纯的理论知识和实物实验更加形象化地展现了其动态特性和规律。
4 结束语
根据理论教学知识,配合实物实验教学,进行了相应仿真实验的设计,包括PID控制模型的建立、分析,对象动态特性的测试,参数整定的方法。在实物实验中加入仿真实验研究,可以减少实验设备投入,而且能够提高学生学习效率[10-12]。通过改革,利用 Matlab强大的资源,教师在教学中结合理论分析的结果,从实验设备所验证的控制对象特性和工程应用的角度来设计课程教学。过程控制系统仿真实验具有简单、直观、方便的特点,使学生既掌握了过程控制原理的理论知识,又能够掌握使用Matlab进行分析的工程应用能力,并结合实际实验设备进行理解,为后续课程学习打下良好的基础。
(References)
[1] 杨光祥,曹晓莉,胡卫军,等.“过程控制系统”综合教学改革探索与设计[J].中国电力教育,2012(13):67,96.
[2] 张葛祥,李娜.MATLAB仿真技术与应用[M].北京:清华大学出版社,2003.
[3] 薛定宇.控制系统计算机辅助设计:MATLAB语言与应用[M].2版.北京:清华大学出版社,2006.
[4] 徐伟伟,刘坤.MATLAB在控制系统仿真教学中的应用[J].中国教育技术装备,2010(5):126-127.
[5] 刘满华,任正云,邵惠鹤.监控平台软件与MATLAB的DDE通信[J].微型电脑应用,2002,18(1):27-29.
[6] 李敏,邹涛,杨马英,等.过程控制系统综合性实验设计与教学实践[J].实验技术与管理,2011,28(6):100-104.
[7] 徐凌桦,胡浩,曹敏.过程控制实验平台控制系统改造[J].高校实验室工作研究,2010(2):100-101.
[8] 何东健,刘忠超,范灵燕.基于MATLAB的PID控制器参数整定及仿真[J].西安科技大学学报,2006,26(4):511-514.
[9] 方康玲.过程控制系统[M].武汉:武汉理工大学出版社,2007.
[10] 林景波,李凤阁,叶雪荣,等.过程控制对象数字仿真实验系统研究[J].实验技术与管理,2011,28(11):36-40.
[11] 胡开明,钱敏,葛远香.基于网络控制与组态技术的过程控制实验室改造[J].实验室研究与探索,2011,30(7):54-57.
[12] 赵虎,李萍,于林丽,等.过程控制集成实验系统[J].仪器仪表学报,2005,26(8):677-678.
