盾构泡沫系统的电气控制
2013-08-01宁浩淞蒲晓波
高 博,宁浩淞,蒲晓波
(中铁隧道装备制造有限公司,河南 郑州 450000)
0 引言
伴随着我国城市化进程的加快,城市地下工程的建设步伐也越来越快。土压平衡式盾构因其具有能较好地控制地面沉降、保护环境、适合在市区和建筑密集区施工等优点,在城市地下工程建设中得到了广泛应用。土压平衡式盾构机能适应多种环境,可在砂、粉砂、黏土等地层中使用。城市地铁隧道大多需要穿越不同地层,然而,设计线路中有些部分并不适合土压平衡式盾构施工;因此,土壤的改良将直接关系到土压平衡式盾构的施工效果。泡沫注入法是众多土壤改良方法中最有效的一种,注入的泡沫可以增加切削土的流动性和止水性,而且能防止切削土粘附在土仓内,降低盾构堵仓和刀盘结泥饼的概率;同时,泡沫可以降低刀盘扭矩,减少刀具磨损,对刀具起到一定的润滑和冷却作用[1]。
目前在国内施工的土压平衡式盾构大多设计有泡沫系统,然而,由于传统设计理念对泡沫系统的不重视,泡沫系统各控制对象无法实现精确控制,从而不能最大限度地发挥泡沫改良的作用,同时极易造成泡沫系统的浪费[2-3]。由于泡沫原液价格较昂贵,使得泡沫系统的使用代价较高,这在一定程度上制约了该改良方法的大规模使用。因此,寻找一种既能保证泡沫改良效果,又能降低工程造价的电气控制方案将成为推广应用泡沫系统的首要任务。
本系统采用PLC作为控制系统的核心,以工业电脑为人机界面,以变频器和比例调节阀为执行部件,通过严谨的逻辑分析和详细的数据计算实现对泡沫流量和泡沫混合比的精确控制,从而最大限度地发挥了泡沫系统的改良作用,降低了泡沫系统的浪费。
1 泡沫系统
泡沫成分如图1所示,泡沫系统流体原理如图2所示。泡沫由泡沫原液、水和空气3部分组成。在泡沫系统运行中,操作手通过改变泡沫各成分的比例来满足不同土质的改良需求,以达到最佳的改良效果。泡沫系统由泡沫原液泵、泡沫混合液泵、泡沫原液箱、泡沫混合液箱、泡沫水管路、泡沫混合液管路、空气管路、泡沫发生器和电气系统等部件组成。
泡沫电气系统包括电气硬件和软件,系统主要包括控制元件、电控执行机构、PLC控制部分和上位机。其中,电控执行机构是泡沫各管路的动力来源;PLC控制部分是整个系统的中枢神经,可为设备提供必要的连锁与警示;上位机是操作手的操作平台,负责将操作手的各种操作指令传达给PLC,并将PLC采集到的信息反馈给操作手作为操作依据。
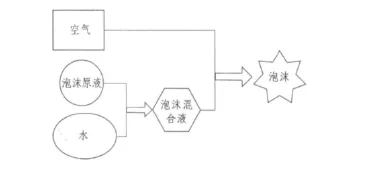
图1 泡沫成分示意图Fig.1 Composition of foam
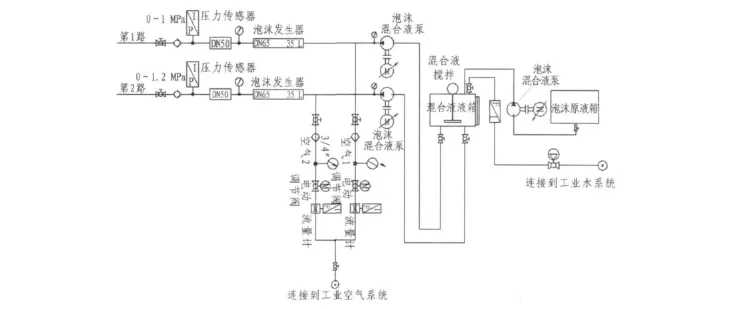
图2 泡沫系统流体原理图Fig.2 Fluid principle of foam system
2 电气硬件系统设计
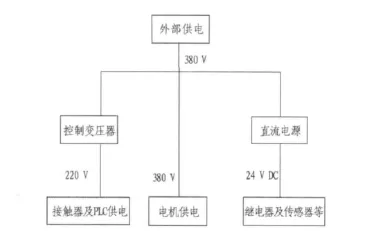
图3 电气系统动力结构图Fig.3 Power structure of electrical system
2.1 泡沫系统的供电系统结构
泡沫系统采用三相380 V AC电源进行供电,电源的分配如图3所示。设备利用控制变压器将部分380 V AC变为220 V AC,供接触器、温控器和散热风扇使用。
泡沫原液泵和泡沫混合液泵的功率分别为0.75 kW和3 kW,为了精确控制泡沫原液和混合液的流量,2种泵均采用变频器控制。设备选用了西门子6SE6440-2UD21-1AA1 380 V-1.1 kW 和 6SE6440-2UD24-0BA1 380 V-4 kW 2种变频器。泡沫原液泵和混合液泵选用变频电机,电机风扇独立供电,由GV2M06C进行短路及过载保护,直流接触器LP1K0910BD控制其通断。
混合液搅拌器由1台0.75 kW的三相电机直接驱动,由电机断路器GV2-M07C进行短路和过载保护,接触器LC1-D09M7C控制其通断。泡沫混合液经过搅拌器的搅拌后混合将更加均匀,发泡效果将更加理想。
三相动力线同时给控制线路供电,使用DRT-960-24将三相电源转换为24 V直流电,为PLC、传感器、电磁阀等的控制提供电力来源。
2.2 泡沫系统PLC硬件设计
根据泡沫系统的控制特点和盾构机的PLC网络要求,系统采用三菱PLC Q02U进行本地的数据采集、逻辑运算以及数据输出,采用三菱H网络与盾构机其他PLC进行数据交流,利用以太网网络与泡沫系统上位机进行信息交换。在进行PLC硬件配置时,各功能模块可以根据用户习惯任意搭配顺序,使其应用更加灵活方便[4-5],电气系统PLC组态图如图4所示。
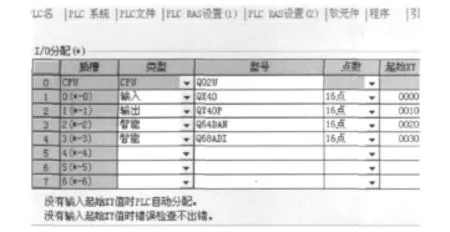
图4 电气系统PLC组态图Fig.4 PLC configuration diagram of electrical system
系统采用了1块16点的数字量输入模块、1块16点的数字量输出模块、1块8通道的模拟量输入模块和1块4通道的模拟量输出模块作为本地控制柜的输入输出模块[6]。数字量输入模块主要用于采集断路器和变频器的反馈信息,数字量输出模块主要用于控制接触器和中间继电器,模拟量输入模块用来采集传感器的反馈信号,模拟量输出模块用来控制变频器的运行频率,进而实现对螺杆泵的调试。系统选用以太网模块QJ71E71-100同上位机通讯,选用H网模块QJ71BR11跟盾构机其他PLC通讯。
2.3 泡沫系统上位机设计
本系统上位机选用研祥工业电脑PPC-1561,在工业电脑上安装三菱OPC软件[7],从而实现工业电脑与PLC的数据交换。
上位机操作界面分为泡沫控制和泡沫参数设置2个操作区域。泡沫控制区域可选择需要操作的泡沫管路及控制方式,同时,控制泡沫系统的启动和停止。泡沫参数设置区域可对泡沫运行时的各控制参数(如泡沫原液比、发泡率等)进行设置,泡沫系统控制界面如图5所示。

图5 泡沫系统控制界面Fig.5 Control panel of foam system
上位机设有报警界面,当泡沫系统出现故障时,该界面可显示出相应的故障信息,方便操作司机进行故障排除。
3 控制系统软件设计
3.1 泡沫系统控制流程
泡沫系统正常运行的前提是建立在断路器及变频器正常运行的基础上。当泡沫系统各硬件一切正常后,首先进行泡沫各系统公用参数的设置,然后选择控制方式并设置与控制方式相匹配的控制参数,最后选择需要注入的泡沫管路并按下启动按钮。
泡沫系统分为手动控制、半自动控制和自动控制3种控制方式。手动控制就是操作手可以根据需要对各管路的泡沫混合液流量和空气流量进行自主调节。半自动控制是泡沫系统运行后,PLC根据各路设定的泡沫混合液流量和发泡比控制泡沫系统的注入。自动控制在掘进时才能运行,PLC根据推进速度自动控制泡沫系统的注入,电气系统PLC控制流程如图6所示。
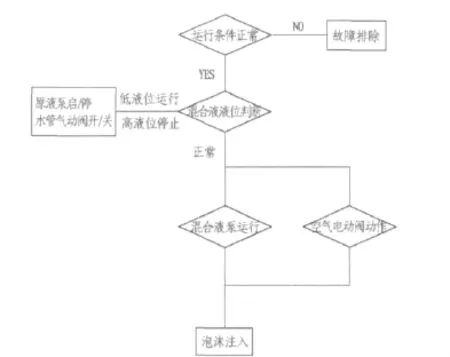
图6 电气系统PLC控制流程图Fig.6 Procedure of PLC control of electrical system
泡沫系统开始运行时,PLC首先检测泡沫混合液箱的液位开关,当出现低液位报警时,泡沫水管气动阀打开且泡沫原液泵运行。在泡沫水管路上安装流量计,PLC根据水的流量和上位机设置值进行泡沫原液流量计算,然后通过控制泡沫原液泵的变频器进而控制泡沫原液流量,使泡沫混合液按设定的混合比进行混合。在泡沫原液泵运行的同时,位于泡沫混合液箱的搅拌器开始工作,将泡沫混合液充分搅拌。当混合液箱高液位开关动作时,泡沫原液泵停止且泡沫水管气动阀关闭,同时PLC开始计时,5 min后泡沫混合液箱搅拌器停止工作。
当泡沫混合液箱液位正常且泡沫注入开始按钮被按下后,泡沫混合液泵运行,同时空气管路的电动调节阀也开始工作。PLC根据不同的控制模式计算泡沫混合液的流量值,然后对泡沫混合液变频器进行调节,进而控制泡沫混合液的流量;与此同时,PLC将空气流量的检测值和计算值进行比较,进而控制电动调节阀的打开和关闭。在电动调节阀的运算控制中引用PⅠD控制,从而得到更加稳定的空气流量。
在泡沫混合液管路中安装压力传感器,当压力检测值高于设定值时,泡沫系统停止工作且进行系统报警,操作手根据具体情况进行相应处理。
3.2 程序设计
程序设计采用梯形图设计,利用三菱 GX Developer软件进行PLC编程。梯形图编程简单明了,具有良好的可读性和可维护性。梯形图的编程设计入门简单,对操作人员进行简单培训即可进行常规操作,方便操作人员对系统故障的诊断和排除[8-10]。
在程序设计中,利用工业电脑采集到的启停信号及相关的控制选择信息配合控制回路中反馈的安全信号做出条件判断。当满足运行条件时,给出正常的运行提示,同时进行泡沫注入的控制输出;当不满足运行条件时,将无法进行泡沫注入操作,同时报警程序运行,并在工业电脑上给出故障提示,故障清除后报警信息才能消失。
满足运行条件后,PLC首先采集工业电脑输入的控制信息,利用不同模式下泡沫系统的计算公式计算泡沫各成分的流量值;然后,通过调节变频器输出频率调节泡沫原液泵及泡沫混合液泵的流量,达到泡沫各成分精确控制的目的。为了更好地调节泡沫系统,在泡沫各管路中设置流量计,实时监控泡沫各成分流量值,并将流量反馈信号与其流量计算值进行比较,实时校验,进一步提高泡沫系统的控制精度。
3.3 故障处理
对系统运行过程中检测到的故障进行收集,故障报警检修人员可以直观地通过报警信号对故障进行处理。
4 结论与讨论
该泡沫控制系统在某公司生产的盾构中已经得到成功应用,经过多次试验,泡沫的发泡效果和精确控制都达到了预期效果。该控制系统的应用提高了泡沫系统的控制精度,降低了泡沫系统的施工成本,同时改善了泡沫系统的土壤改良效果,提高了泡沫系统的性价比。
试验证明,在现有技术条件下,PLC配合使用变频器的控制方法是泡沫系统精确控制的最好方法,但是,由于PLC反应速度和变频器自身缺点等因素影响,该控制方案无法做到完美控制。随着科学技术和控制理论的不断发展,未来将会有性能更好、精度更高的泡沫控制方案问世。
[1]王杜鹃,陈馈.复合式土压平衡盾构泡沫系统的研制[J].建筑机械化,2009(2):65-67.(WANG Dujuan,CHEN Kui.Manufacture on foam system of composite EPB shield[J].Construction Mechanization,2009(2):65-67.(in Chinese))
[2]张成.EPB盾构泡沫系统设计缺陷与改进[J].铁道建筑技术,2009(1):86-88,100.(ZHANG Cheng.Design defects and improvement of EPB shield TBM foam system[J].Railway Construction Technology,2009(1):86-88,100.(in Chinese))
[3]程永亮.盾构泡沫系统优化技术研究[J].建设机械技术与管理,2011(11):142-145.(CHENG Yongliang.Research on the optimization of the bubble system of the shield machine[J].Construction Machinery Technology and Management,2011(11):142-145.(in Chinese))
[4]庄汉清.三菱PLC编程实例的教学设计[J].化学工程与装备,2009(3):125-129.
[5]林卫共,林鹏,郭林峰,等.三菱PLC控制器在电机学实验中的应用[J].实验科学与技术,2010(4):44-45,96.(LⅠN Weigong,LⅠN Peng,GUO Linfeng,et al.Application of the mitsubishi PLC for the controlling in asynchronous motor experiment[J]. Experimental Science and Technology,2010(4):44-45,96.(in Chinese))
[6]许颖泉.浅析三菱 PLC的安装与维护[J].硅谷,2009(23):39.
[7]施晨杰,茅忠明.OPC技术研究及其客户端实现[J].上海理工大学学报,2008(6):41-44,50.(SHⅠChenjie,MAO Zhongming.Research on OPC technology and the realization of its client[J].Journal of University of Shanghai for Science and Technology,2008(6):41-44,50.(in Chinese))
[8]吉顺平.可编程序控制器原理及应用[M].北京:机械工业出版社,2011.
[9]陈忠华.可编程控制器与工业自动化系统[M].北京:机械工业出版社,2007.
[10]薛迎成.可编程序控制器原理及应用技巧[M].北京:机械教育出版社,2010.
