基于图像识别的寻迹智能车设计
2013-08-01陈孟元孙书诚
陈孟元,孙书诚,王 虎
(安徽工程大学安徽省电气传动与控制重点实验室,安徽芜湖241000)
寻迹是机器人自主运动的关键技术之一,在现有的多种导航方式中,视觉导航是稳定性较好的方案之一[1]。本文研究对象为一个标准汽车模型,通过车载CMOS摄像头动态获取路面图像,在一个具有特定几何尺寸约束、摩擦因数及光学特性的白色KT板上,利用转向和车速控制,使智能车自动沿着其中心铺设的黑色带状引导线行驶,在保证稳定性的前提下以最短时间完成寻迹任务。
在路径的识别方面,一般只考虑均匀光照情况,忽视光照强弱对图像采集的影响(光照原因造成的图像信息的丢失会降低智能车判断路径的准确率)[2]。本文在图像处理中改进边缘检测算法,使用动态阈值提高图像的区分度,提升了智能车在前行过程中因光照强度不均匀引起的图像特征提取准确度问题。
1 寻迹智能车硬件设计
寻迹智能车以飞思卡尔公司的MC9S12XS128微处理器为控制核心[3],硬件包括电源管理模块、CMOS摄像头、舵机转向模块、电机驱动模块、转向/行走电机和车速检测模块、PC机调试模板等,其中上位机调试模板通过ZigBee无线通信模块与PC机通讯,结合基于VC环境开发的应用软件实现在线综合调试和分析功能。智能车系统总体结构框图[4]如图1所示。
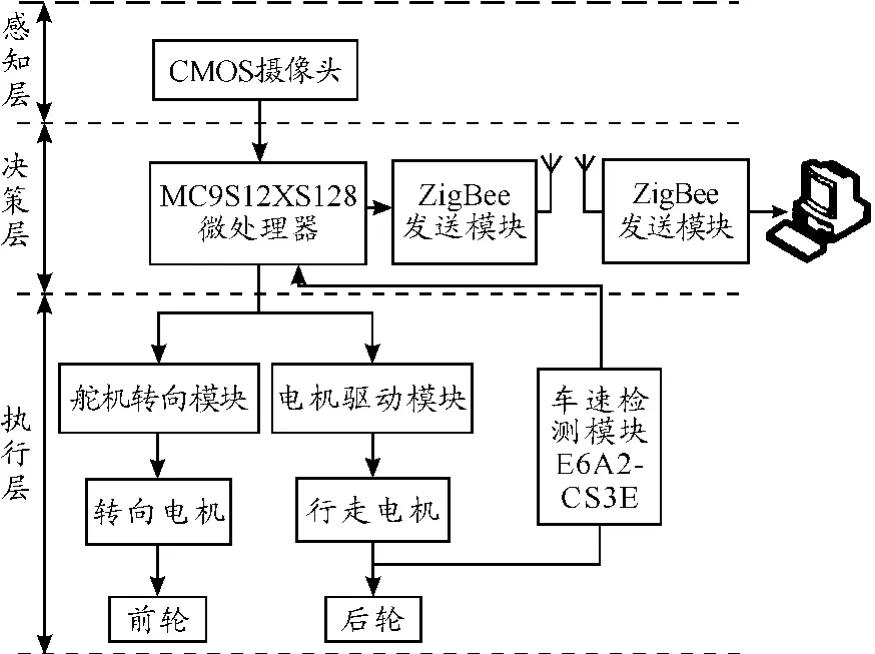
图1 智能车系统总体结构框图
智能车采用MC9S12XS128微处理器作为系统的控制核心,它负责控制各个模块间的协调工作,接收来自CMOS摄像头采集的路况信息和速度检测模块反馈的速度信息,采用边缘检测算法对这些信息进行处理,形成合适的控制量对转向/行走电机进行控制,保证智能车快速稳定地沿指定路径行驶;同时通过异步串口(SCI)把智能车行驶过程中的关键参数应用ZigBee无线通信动技术发送到PC机以便实时分析。
智能车系统采用标准车模7.2 V 2 000 mAh Ni-Cd充电电池进行供电,电机驱动模块可以用7.2 V充电电池直接供电,CMOS摄像头、微处理器、舵机和编码器等模块通过LM2940稳压芯片将7.2 V电压转换成稳定的5 V电压。
路径信息采集模块主要负责采集智能车所处位置的路况信息,输出相应的信号供微处理器处理。选择基于 CMOS传感器的数字摄像头OV6620,采用边缘检测算法对其采集到的路面信息进行处理,以达到良好的路径信息采集效果。
由于路径情况复杂,智能车需要不停地调整转向以适应跑道的变化。舵机转向模块为智能车方向控制执行机构。微处理器通过对摄像头采集的路况信息进行分析处理,针对不同的采集信号对转向电机进行相应的控制,实现相应的转弯要求,从而保证智能车沿跑道准确行驶。
电机驱动模块作为控制行走电机转速的执行机构,要求能有很好的加速和制动性能。智能车的电机驱动是利用两片半桥驱动芯片BST7960构成的H桥式驱动电路,为了实现直流电机的调速采用PWM波对智能车进行控制调速。
采用欧姆龙E6A2-CS3E光电编码器对智能车当前速度进行检测,反馈传至微处理器,通过各种智能算法实现速度的闭环控制。
按照以上设计方案研制的寻迹智能车如图2所示。
2 寻迹智能车图像处理
在光线强度不均匀的情况下使用二值法算法处理图像时,二值化阈值很难确定,且当光线有较小变化时,图像就无法识别引导线[5]。直接边缘检测算法适合光线变化较弱的情况,当光线变化较强时,图像像素的灰度值不呈线性变化,这时此种算法不能清晰分辨图像引导线。本次设计改进了边缘检测算法,用动态阈值替代之前的静态阈值。动态阈值计算如式(1)所示[6]。
式中:Y(i)是第i行计算的动态阈值;X(a)、X(b)分别为第i行白色和黑色像素点的灰度值;λ为取值在0.7~1.0的阈值系数。将k行的所有白色像素点和l行的所有黑色像素点的灰度值求取几何平均,再将2个平均值相减作为下一行的阈值。由于不同的场合光线强度不同,从而阈值也不一样。采用动态阈值可使得每行的阈值过渡自然,可更有效地准确提取图像中的引导线[7]。
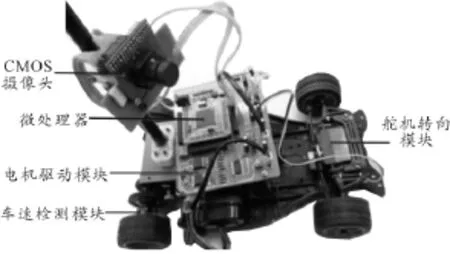
图2 智能车实物
智能车跑道一般由直道、直角弯道与S型弯道组成,如图3 所示[8-9]。
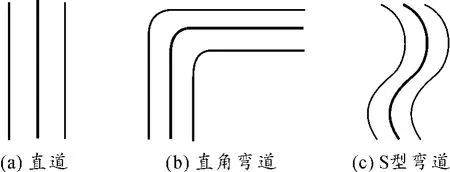
图3 路径类型
图4(a)、5(a)、6(a)是采集的实际图像,中间阴影部分为图像中黑色引导线,亮处为干扰光斑;图4(b)、5(b)、6(b)是直接边缘检测的处理图像;图4(c)、5(c)、6(c)是改进后的边缘检测的处理图像。通过图4~6中比较可以看出,当光线强烈改变时,直接边缘检测算法就无法分辨出黑线,而改进后的边缘检测则能适应光线的改变,区分出道路中的黑线。

图4 直道图像处理前后的对比
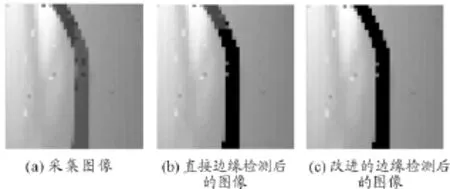
图5 直角弯道图像处理前后的对比
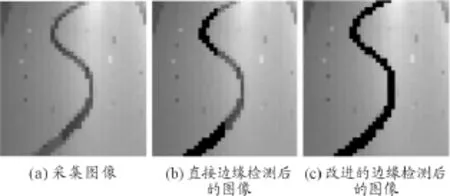
图6 S型弯道图像处理前后的对比
3 实验方案和分析
实验参数测量示意图如图7所示,智能车的几何中心为示意图B点所在直线,道路的中心为A点所在直线,其中路径宽度为50 cm,中间黑色引导线宽度为2.5 cm,智能车为示意图中的方块,摄像头视野为虚线梯形所示范围,图像距车近端视野宽度是24 cm,最远端视野宽度是30 cm。选取图像中的某一行,测出视野最左端至视野中心(即车的几何中心)的距离m,测出视野最左端至黑线中心(即道路)的距离n。x(x=|n-m|)为按比例还原后得到的实际偏差。
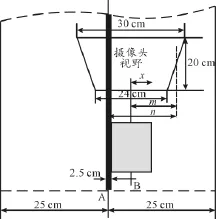
图7 实验参数测量示意图
经实验测试可知,智能车的最高速度可以达到3.5 m/s。为了获取更稳定的参数,设置智能车以 0.8 m/s、1.2 m/s和 1.6 m/s三种速度运行,并分别对直道、直角弯道和S型弯道3种道路类型的偏差进行记录。偏差经过计算得到均值和方差,均值反映了智能车偏离黑线中心的远近,方差反映了智能车运行的稳定状态。
寻迹智能车在均匀光照情况下分别按照直接采集的图像和经过改进边缘检测算法处理后的图像行驶,获得的实验数据如表1和表2所示。

表1 寻迹智能车均匀光照情况下采集图像的跟踪误差

表2 寻迹智能车均匀光照情况下采集图像经改进边缘检测算法处理后的跟踪误差
由表1分析可知,当智能车以0.8 m/s速度行驶时,偏离道路中心位置少,运行的状态稳定,各种道路类型均可稳定运行;当智能车以1.6 m/s速度行驶时,在直线型的道路上行驶,偏离道路中心仍然较少,能保持良好的运行状态,但在直角弯道和S型弯道时,其偏离中心较多,跟踪误差较大。在速度相同时,通过比较智能车行驶的偏差均值可知,直角弯道和S型弯道时偏差较大。为了减小这2种道路类型时的偏差,需对智能车进行预测控制,使智能车提前转弯。比较智能车行驶时的方差可知,弯道的方差较大,反应了智能车运行状态变化较快,产生了一定的振荡。针对这种情况,对某些弯道进行直线化处理,即当摄像头检测并判断出当前路径为直角弯道时,寻迹智能车应适当减速并沿着弯道内侧前行以保证智能车所走的路程最短且增强了稳定性;当摄像头检测并判断出当前路径为S型弯道时,寻迹智能车应沿着S型弯道的中心直线前行。智能车在不同路径类型的规划行走路线如图8所示[10]。

图8 智能车规划行走路线
同时,对比表1和表2可知,以直角弯道为例,按照直接采集图像行驶方案,0.8 m/s、1.2 m/s和1.6 m/s速度时的路径偏差均方差分别为:11.666 7、20.166 7、26.000 0;按照改进边缘检测算法处理后的图像行驶方案路径偏差均方差分别为:7.666 7、12.666 7、16.833 3,稳定性分别提高了34.2%、37.2%和35.3%。由此可见,在相同道路类型和速度下,按照改进边缘检测算法处理后的图像行驶的寻迹智能车均比按照直接采集图像行驶的均方差小,稳定性好。
寻迹智能车在光线强度不同情况下分别按照直接边缘检测算法与改进边缘检测算法处理后的图像行驶,获得的实验数据如表3和表4所示。
对比表3和表4可知,在相同的道路类型和速度情况下,表4中的各项数据均优于表3。这表明,当有外来光线影响时,寻迹智能车采用直接边缘检测算法后可以沿着指定路径行驶,但偏离黑色中心线较远,稳定性较差;在采用改进边缘检测算法后,智能车行驶时接近黑色中心线,稳定性有所提高,接近于表2所示的误差水平,表明通过使用改进后的边缘检测算法,能解决图像在光照强度不同的情况下引起较大误差的问题,提高了寻迹智能车的稳定性。

表3 寻迹智能车在光线强度不同情况下经直接边缘检测算法处理后的跟踪误差

表4 寻迹智能车在光线强度不同情况下经改进边缘检测算法处理后的跟踪误差
4 结束语
实验结果表明,采用MC9S12XS128单片机作为控制核心,CMOS摄像头作为路径识别的传感器,可以充分利用模糊自适应PI控制实现模糊控制算法,具有较好的前瞻性,同时,根据道路的不同类型采用不同的控制参数,对智能车寻迹起到一个良好的预判作用,使智能车能够平滑地沿引导线行驶。
在图象处理方面,通过在均匀光照与光线强度不同的两种情况下对寻迹智能车分别按照直接采集图像、直接边缘检测算法与改进边缘检测算法处理后的图像行驶的误差进行对比,发现使用改进的边缘检测算法能很好地解决图像受光线影响的问题,提高了整个智能车的抗干扰能力,使智能车的平均速度由原来的1.4 m/s提高到2.1 m/s。
[1]卓晴,黄开胜,邵贝贝.学做智能车——挑战飞思卡尔杯[M].北京:北京航空航天大学出版社,2007.
[2]许欢,唐竞新.调制光寻线系统及其在自动行走机器人中的应用[J].清华大学学报:自然科学版,2002,42(1):115-117,142.
[3]邵贝贝.微处理器嵌入式应用的在线开发方法[M].北京:清华大学出版社,2004.
[4]安徽工程大学.一种面向路径识的远程遥控智能车:中国,201120478840.0[P].2012 -08 -15.
[5]张云洲,师恩义,吴成东,等.基于CCD的智能车导航系统研究[J].东北大学学报:自然科学版,2009,30(2):162-165.
[6]郑建立,黄丽佳,葛鹏飞,等.基于CCD的智能车寻迹方法[J].东华大学学报:自然科学版,2008,34(6):728-730.
[7]孙书诚,郎朗,王虎.基于路径识别的寻迹智能车设计与实现[J].安徽工程大学学报,2012,27(1):60-63.
[8]兰华,李晓鹏,丁勇竣.智能车转向系统模糊控制器设计研究[J].传感器与微系统,2010,29(5):34 -36.
[9]邱铁,徐子川,江贺.基于模糊控制的智能车路况识别[J].计算机工程与应用,2009,45(14):213 -216.
[10]游林儒,胡庆华.双舵机模糊控制在智能车控制中的应用[J].计算机工程与应用,2009,45(32):209 -211.
