快速路交通分布参数系统的迭代学习控制方法
2013-07-31池荣虎李建营刘祥鹏隋树林
池荣虎,李建营,刘祥鹏,隋树林
(1.青岛科技大学自动化与电子工程学院,山东青岛266042; 2.青岛科技大学数理学院,山东青岛266061)
快速路交通分布参数系统的迭代学习控制方法
池荣虎*1,李建营1,刘祥鹏2,隋树林2
(1.青岛科技大学自动化与电子工程学院,山东青岛266042; 2.青岛科技大学数理学院,山东青岛266061)
本文基于快速路交通流分布参数系统模型,利用快速路交通流系统具有重复运行的显著特点,设计一种新的入口匝道分布参数迭代学习边界控制方案.所提出的方法采用带有反馈的PD-型控制律,不仅可以从以前重复过程中学习有用的知识,提高系统的控制精度;还可以有效的抑制当前运行过程中系统的量测噪声和扰动等不确定影响因素.该方法的另一个显著特点在于充分利用了快速路交通系统的分布参数模型描述,更全面地利用了系统的时空控制信息,从而提高了整个路段的控制性能.本文基于Matlab仿真进一步说明所提出方法的有效性和适用性.
智能交通;分布参数系统;迭代学习控制;入口匝道控制;边界控制
1 引 言
快速路交通拥堵问题成为近年来交通工程领域研究的热点之一.在众多控制方法中,入口匝道控制[1]是快速路交通控制中应用最广泛的一种方式.可以分为两类,一类是局部匝道控制系统,主要包括DC控制(Demand Capacity Control),OC控制(Occupancy Control)[2]和ALINEA控制[3];另一类是区域匝道控制系统,主要包括多入口匝道联合控制和整个系统的最优控制[4]等.入口匝道控制通过控制由匝道进入快速路的车辆数来调节快速路的车流量,使得快速路上的交通流密度维持在一个期望的水平,从而缓解交通拥堵问题.
值得指出的是快速路交通流本身具有明显的重复性和周期性[5],因此,如何利用交通流系统这种本质上的重复性进行控制系统的设计,使其具有从重复中学习的能力,进一步提高控制系统的控制性能和品质,降低快速路交通系统的能源浪费和污染排放,是一个非常值得研究的问题.迭代学习控制(Iterative Learning Control,ILC)[6]模拟人类的学习过程,非常适合处理重复运行的动态系统.它可以利用以前操作的信息修正当前控制行为,提高系统的控制性能和跟踪精度.迭代学习控制在控制器结构上非常简单,计算负担也非常小,控制器的设计对模型的依赖性非常少,可用于不确知、不确定对象非线性复杂系统的高精度跟踪,因此非常适合城市快速路这一类典型的复杂不确定系统的控制任务.文献[7]首先将ILC用于快速路入口匝道控制,得到了很好的效果;文献[8]则进一步将基于ILC的入口匝道控制方法与已有的反馈控制(如ALINEA)相结合,实现了反馈控制与前馈ILC的优势互补;文献[9]讨论了基于ILC的入口匝道流量和主路速度均受限的控制情况;文献[10]提出了快速路入口匝道的非参数自适应迭代学习控制方案,是一种数据驱动的无模型控制方法.
需要说明的是,上述快速路交通系统的迭代学习控制方法[7-10]都是基于宏观交通流模型[11]进行分析和设计的.该模型是由一系列差分方程构成的,仅与时间变量有关.然而,实际的快速路交通系统往往同时具有时空演化特征.事实上,快速路交通流可看作是一个关于密度和流量的流体,它的模型参数与工作特性既是时间的函数,还与空间位置有关,其内部相邻两个位置点之间在同一时刻的密度和流量可能是不同的.实际中,具有这种特性的分布参数系统非常多,如热传导与波的传播过程,化学反应器中的物质分布,大气与海洋运动,甚至金融系统,生态系统和人口系统等[12].理论上,分布参数系统是更为真实的模型,可更好地逼近实际系统.关于分布参数系统的迭代学习控制的研究已有一些成果[12,13],然而仅局限于理论分析,缺乏实验仿真和实际应用来验证所提出方法的有效性和适用性.
本文通过引入文献[14]中的快速路交通流分布参数系统模型,充分利用空间和时间构成的二维偏微分方程描述交通流系统的内部特性,提出了快速路交通流分布参数系统的迭代学习边界控制方法.一方面,可充分利用快速路交通流在时间和空间上的控制知识,提高系统的控制性能;另一方面,所提出的边界控制策略将交通系统的边界条件考虑在内,符合交通控制的实际问题要求.本文给出了迭代学习边界控制器的详细设计过程,并通过仿真比较研究进一步验证了所提出方法的有效性.
2 交通流分布参数系统模型
快速路交通流分布参数模型[14],是采用流体动力学连续模型来表示实际运行的快速路交通流,如图1所示.

图1中,ρ(x,t)表示交通流密度,veh/(lane·km-1),是关于快速路上位置x和时间t的函数;q(x,t)表示沿着快速路车流方向在快速路位置x上t时刻的车流量,veh/hour;f(t)是上游快速路进入快速路主道交通流量,veh/hour;u(t)是入口匝道进入快速路主道的交通流量,veh/hour;r(t)是从辅路进入匝道的交通流量,veh/hour;l(t)是匝道上车辆排队长度,veh.
如图1所示,在快速路上长度为Δx的路段,有一定的交通流从上游流入这个路段,同时也有一定的交通流从下游流出.考虑在无穷小时间段Δt上的守恒定律,有

式中 δ表示在时间段Δt内长为Δx路段车辆总数变化量;N(t)表示t时刻路段Δx上的总车辆数;N(t+Δt)表示t+Δt时刻路段Δx上的总车辆数;m表示路段Δx上的车道数,为常数.
又因在无穷小时间Δt内从路段Δx上游流入的交通流量为q(x,t)Δt,下游流出的交通流量为q(x+Δx,t)Δt,所以在时间段Δt内路段Δx上车辆总数变化量又可表示为

由式(1)和式(2),可得

对式(3)移项整理,得

式(4)两边取极限,移项可得

由此可得交通流守恒方程为

又因为流量、密度、速度具有如下关系


在Δt时间内,入口匝道上车辆排队长度的变化为

对式(9)移项,取极限得

由式(8)、式(9)得快速路交通流分布参数系统模型为

由图1得交通流分布参数系统模型的边界条件和初始条件分别为

本文考虑快速路交通流系统具有重复运行的特征,因此在第n次重复时式(11)~式(13)可相应改写为

式中 下标n为迭代次数.
3 控制系统设计
3.1 控制目标
快速路入口匝道控制目标是使得主道上交通流密度尽量维持在一个最佳水平,且交通消散最快,此刻的交通流流量达到最大值.引入经典的Greenshield's Model[15]的速度表达式v(x,t)=vf(1其中ρmax为最大交通流密度(拥挤密度);vf为自由速度,由式(7)得

将式(18)中q(x,t)对ρ(x,t)求偏导,并令其等于0得
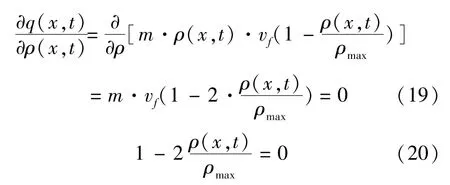
则期望交通流密度ρd为

3.2 迭代学习律设计
对于式(14)~式(17)所示的快速路交通流分布参数系统模型,控制任务是在时间[0,T]范围内,要求系统输出yn跟踪期望输出yd.
定义输出误差

利用en(x,t)及控制输入量un(t)生成下一次跟踪的控制输入,因此快速路交通流分布参数系统的迭代学习控制律的一般表达式可表示为

式中 ψ(·,·)为学习算子.与文献[7]中给出的方法不同,本文定义的式(23)含有研究路段上每个位置的误差信息,不仅是时间的函数,还与空间位置有关.
值得注意的是,实际交通流系统的匝道控制作用在边界,根据式(14)~式(17),设计式(23)需要对快速路主干线上的交通信息进行采集与处理,以实现边界控制作用对实际快速路主干线的最优控制.因此,需要充分利用描述实际快速路系统的初始条件、限制条件和系统运行特性等.如图2所示,快速路可以看成不可压缩的流体动力学模型.

图2 快速路交通流动力学流体模型Fig.2 Freeway traffic flow hydrodynamic model
现实中分布参数系统大多包含大量除时间轴之外相关维度(如空间轴)的信息,如图2所示的交通流系统,需要考虑其交通流现象在空间维度上的信息体现.因此,可将交通流系统中把快速路分成i个路段,长度为xi(尽量小),ρ(xi,t)作为路段上的平均交通流密度,这样既可以体现交通流的时间维度信息,又不会忽略交通流空间维度信息对控制的影响.
定义新的输出误差函数

式中 L为整段快速路的长度;φ(en(x,t))是关于交通流空间和时间的二维误差信息函数,充分考虑了实际交通系统的时空特性.
根据以上分析,本文提出的快速路交通流分布参数系统边界控制的具体形式为如下所示的一类PD型开闭环迭代学习控制方法

式中 Γ1,Γ2为迭代学习增益.该方法在开环控制的基础上引入反馈环节形成前馈—反馈迭代学习控制,可利用系统当前的误差反馈修正控制作用,提高ILC的瞬态响应性能.同时在控制律中引入微分环节,能够快速响应输出误差信号的变化趋势.从而,可有效弥补单一比例调节或者单一微分控制的不足,具有更好的稳定性和更强的鲁棒性.
4 仿真研究
考虑一段单车道快速路,长度为10 km,分为10节路段,每段长度为1 km,仅在第1个路段有一个入口匝道,沿快速路车流量方向进入研究路段的交通流量为fn(t)=2 000(1.0+0.2sin(0.001t)),由辅路进入匝道的交通流量为 rn(t)= 400(1.0-0.2sin(0.001t)),期望交通流密度为ρd=40 veh/(lane·km-1),交通流系统最大拥挤密度为ρmax=80 veh/(lane·km-1),匝道最大排队长度为 lmax=50 veh.初始密度为 ρ(x,0)= 40 veh/(lane·km-1),采样周期T=30 s,自由速度 vf=120 km/hour,采样时间 t=0.5 hour =1 800 s.
应用所提出的开闭环PD-ILC学习律式(25),设Γ1=25,Γ2=0.8,仿真结果如图3(a),图3(b)所示.由此可以看出,开闭环PD-ILC可实现对快速路主道上期望交通流密度很好的跟踪,使快速路主道上交通流密度的最大跟踪误差较快地收敛为零.
以便对比,给出纯粹前馈控制的开环PD-ILC学习律

该方法也是基于快速路交通系统的分布参数模型而设计的,其误差信息也包含了不同时间不同位置的情况.设Γ1=25,Γ2=0.8,仿真结果如图4 (a),图4(b)所示.比较图3和图4可知,开闭环PD-ILC带有当前反馈作用,可提高系统的瞬态响应品质,具有更好的迭代收敛性能.

图3 (a) 主道交通流密度Fig.3(a) Mainline traffic density
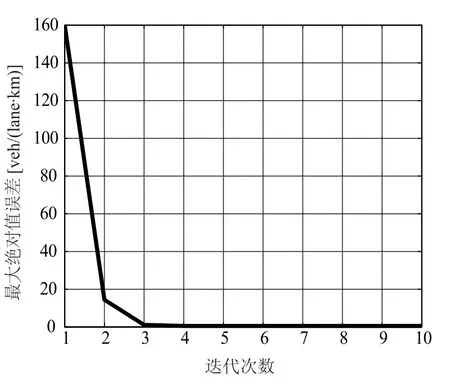
图3 (b) 主道密度的最大跟踪误差Fig.3(b) Maximun tracking error of mainline

图4 (a) 主道交通流密度Fig.4(a) Mainline traffic density

图4 (b) 主道密度的最大跟踪误差Fig.4(b) Maximun tracking error of mainline
为进一步说明基于分布参数系统的ILC控制策略的优越性,根据文献[11]中的快速路交通系统宏观交通流模型,设计开闭环PD-型迭代学习律,如下所示

与式(25)相比,式(27)中的误差信息仅与时间参数有关,不含有研究路段的空间位置信息.
设Γ1=25,Γ2=0.8,仿真结果如图5所示.显然,式(25)充分考虑了研究路段上每个位置的误差信息,从而具有更好的控制性能.
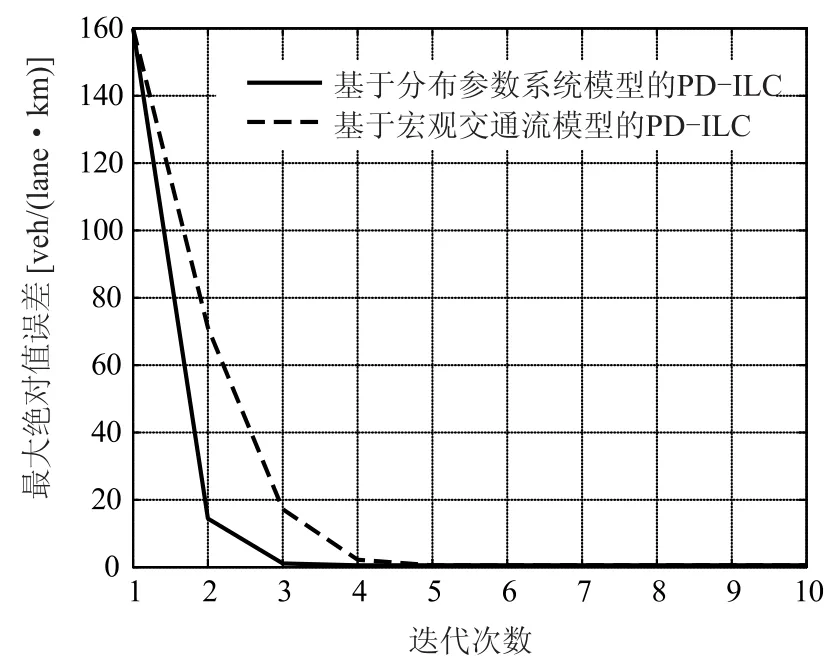
图5 主道交通流密度的最大跟踪误差Fig.5 Maximun tracking error of mainline traffic flow density
5 研究结论
基于偏微分方程描述的快速路交通流分布参数系统模型,本文利用交通流系统的重复性和周期性特点,提出了入口匝道的开闭环PD-ILC方法.与纯粹前馈主导的PD型开环ILC方法相比较,系统的瞬态响应性能提高,可有效抑制当前运行过程中系统不确定因素的影响,具有更好的跟踪效果.与文献[11]中基于宏观交通流模型的PD型开闭环ILC方法相比较,所提出的方法考虑了快速路交通系统的时空特性,误差信息包含了位置和时间要素,提高了ILC系统的收敛速度和控制性能.仿真结果验证了所提出方法的有效性和适用性.
[1]Parageorgiou M,Kotsiaios A.Freeway ramp metering: An overview[J].IEEE Transactions on Intelligent Transportation Systems,2002,3(4):271-281.
[2]Masher D P.Guidelines for design and operation of ramp control systems[R].California,USA:Transportation Research Board,1976.
[3]Papageorgiou M,Hadj S H,Blosseville J M.Alinea: A local feedback control law for on-ramp metering [C]//Proceedings of the 3rd International Conference on Road Traffic Contro1,London,UK IEEE,1991: 58-64.
[4]Kotsiaios A,Papageorgiou M,Mangeas M,et al.Coordinated and integrated control of motorway networks via nonlinear optimal contro1[J].Transportation Research Part C:Emerging Technologies,2002,10(1):65-84.
[5]HOU Z S,ZHONG H W,XU J X.An iterative learning approach for local ramp metering[C]// ProcedingsofInternationalConference on Control Applications,Taibei,Taiwan:IEEE,2004:989-994.
[6]孙明轩,黄宝健.迭代学习控制[M].北京:国防工业出版社,1999.[SUN M X,HUANG B J. Iterative learning control[M].Beijing:National Defense Industry Press,1999.]
[7]HOU Z S,XU J X.Freeway traffic density control using iterative learning control approach[C]//The IEEE 6th InternationalConference on Intelligent Transportation Systems,Shanghai,China,2003(2): 1081-1086.
[8]HOU Z S,XU J X,YAN J W.An iterative learning approach for density control of freeway traffic flow via ramp metering[J].Transportation Research Part C: Emerging Technologies,2008,16(1):71-97.
[9]赵明,侯忠生,晏静文.受限迭代学习入口匝道控制收敛性分析[J].交通运输系统工程与信息, 2011,11(2):166-173.[ZHAO M,HOU Z S,YAN J W.Convergence analysis of ILC based ramp metering underconstraint[J]. JournalofTransportation SystemsEngineering and Information Technology, 2011,11(2):166-173.]
[10]池荣虎,侯忠生,隋树林.快速路入口匝道的非参数自适应迭代学习控制[J].控制理论与应用, 2008,25(6):1011-1015.[CHI R H,HOU Z S, SUI S L.Non-parameter adaptive iterative learning control for the freeway traffic ramp metering[J]. Control Theory& Applications,2008,25(6): 1011-1015.]
[11]Papageorgiou M,Blosseville J M,Hadj S H.Modeling and real time control on traffic flow on the southern part of Boulevard Peripherique in Paris[J].Transportation Research Part A:Policy&Practice,1990,24(5): 345-370.
[12]Chao Xu,Reza Arastoo,Eugenio Schuster.On iterative learning control of parabolic distributed parameter systems[C]//17th Mediterranean Conference on Control & Automation, Makedonia Palace, Thessaloniki,Greece,2009:510-515.
[13]谢胜利,谢振东,韦岗.非线性分布参数系统目标跟踪的学习控制算法[J].自动化学报,1999,25 (5):627-632.[XIE S L,XIE Z D,WEI G. Learning algorithm for tracking control of nonlinear distributed parameter systems[J].Acta Automatica Sinica,1999,25(5):627-632.]
[14]Pushkin Kachroo,Kaan Ozbay.Feedback ramp metering in intelligent transportation systems[M].New York: Kluwer Academic/Plenum Publishers,2003.
[15]Greenshields B D.A study of traffic capacity[J]. Highway Research Board Proceedings,1935,14(1): 448-477.
Iterative Learning Control for Freeway Traffic Distributed Parameter Systems
CHI Rong-hu1,LI Jian-ying1,LIU Xiang-peng2,SUI Shu-lin2
(1.School of Automation and Electrical Engineering,Qingdao University of Science and Technology, Qingdao 266042,Shandong,China;2.School of Mathematics and Physics,Qingdao University of Science and Technology,Qingdao 266061,Shandong,China)
Based on the freeway traffic distributed parameter system model,this paper presents the boundary control approach of the on-ramp distributed parameter system with consideration of the repeatability feature of traffic system.The approach with feedback PD-type control law improves the precision of the control system by learning useful knowledge in previous conductions.Moreover,it can effectively suppress the influence of the system measurement noises and disturbances.It also integrates the system space and time control information and adopts the freeway traffic distributed parameter system model description,so as to improve the control performance of the whole freeway section.The simulation results further confirm the effectiveness and appliciability of the proposed approachs by Matlab.
intelligent transportation;distributed parameter system model;iterative learning control;onramp metering;boundary control
TP273
A
TP273
A
1009-6744(2013)02-0042-06
2012-12-06
2013-01-17录用日期:2013-01-23
国家自然科学基金(60974040);山东省优秀中青年科学家科研奖励基金(BS2011DX010);山东省高等学校科技计划项目(J10LG32).
池荣虎(1975-),男,山东莱芜人,副教授.
*通讯作者:ronghu_chi@hotmail.com